







urdf文件导入到gazebo中进行显示
主要流程
生成URDF文件
据笔者所知主要有两种方法得到urdf文件:
-
对于较简单的可以自己写urdf文件,可参考这个,详细介绍了urdf文件各部分功能和编写urdf与xacro的使用方法 & 机械臂模型导入rviz仿真示例
-
较为复杂的多关节模型则可以利用solidworks及其插件进行生成,具体可参照从solidworks生成urdf
建立ros工作空间并导入urdf文件到gazebo
-
在根目录中创建catkin_ws文件夹和子文件夹src(~/ 表示在用户的主目录创建,也可以手动建立这两个文件夹)
$ mkdir -p ~/catkin_myrobot/src -
将生成的完整urdf文件夹复制到新建立的src文件下,此处尽量不要改动文件夹名称,使其与urdf文件名保持一致以防止意外出错

-
在命令行终端转到catkin_myrobot文件夹并进行编译(根据个人人爱好编译也可使用catkin_make install命令以生成install文件夹)
$ cd catkin_myrobot $ catkin_make -
接着必须进行环境变量设置后才可运行命令将urdf导入gazebo中。不然会报错,命令如下
$ source devel/setup.bash $ roslaunch dog_sim gazebo.launch注:roslaunch xxxx gazebo.launch语句的第二项为urdf文件名
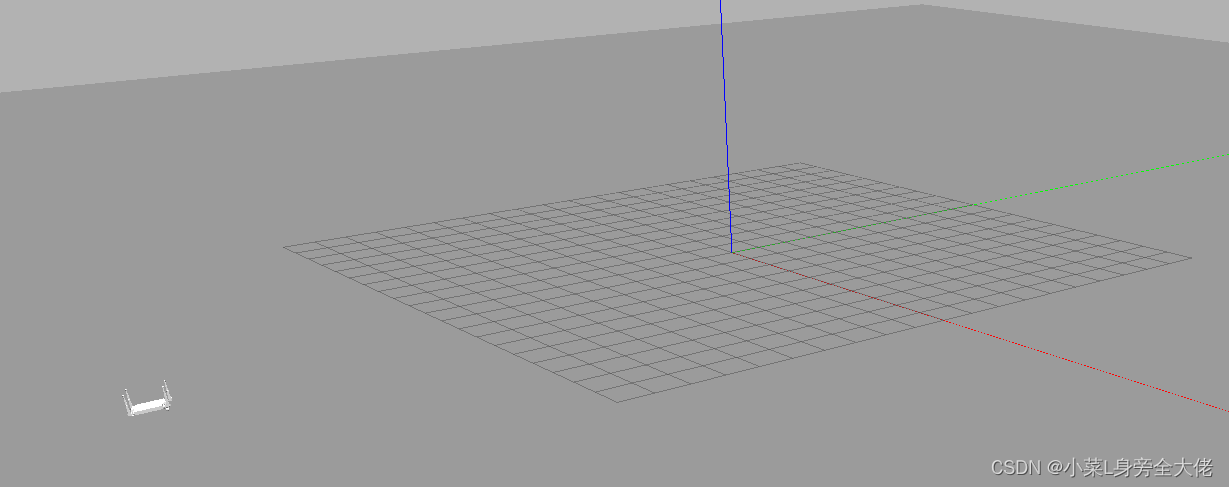
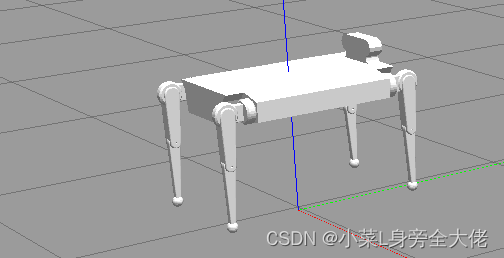
此时则会启动gazebo界面完成导入,如果没看到模型则可能是模型和地板穿模导致弹飞,缩小试图即可看到模型
这时可以先点击下方的暂停然后重置世界根据自己需求在调整初始位置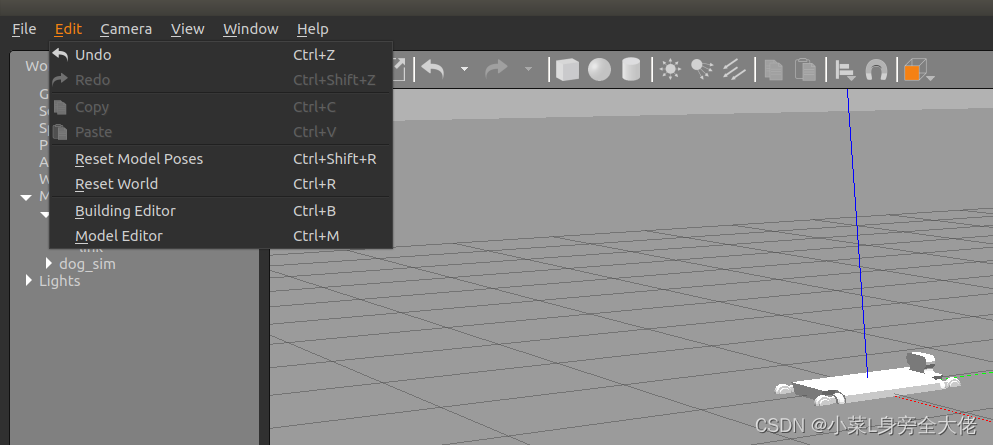
在Rviz仿真打开URDF模型可参照















 6136
6136











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









