






一、相机标定
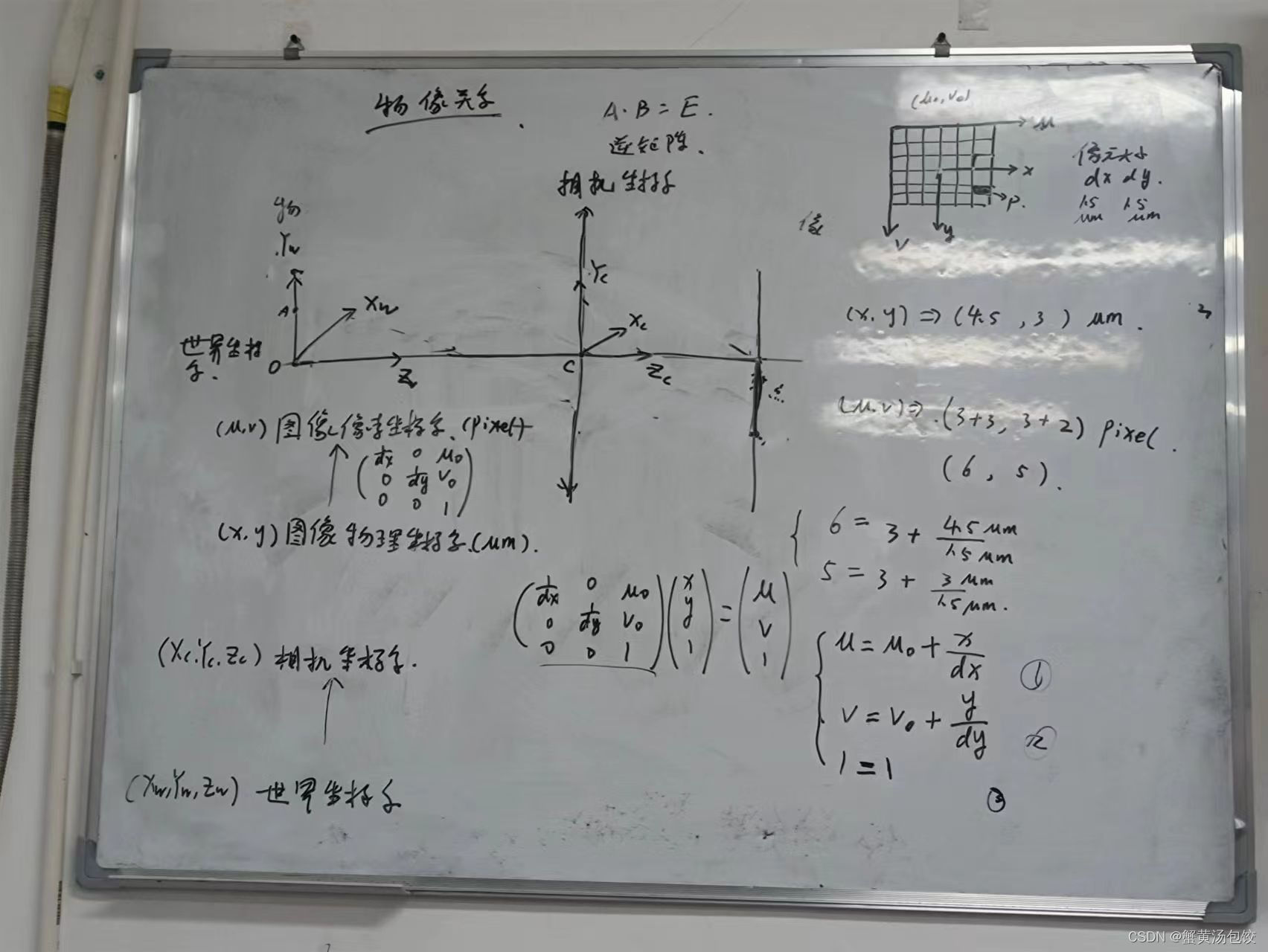
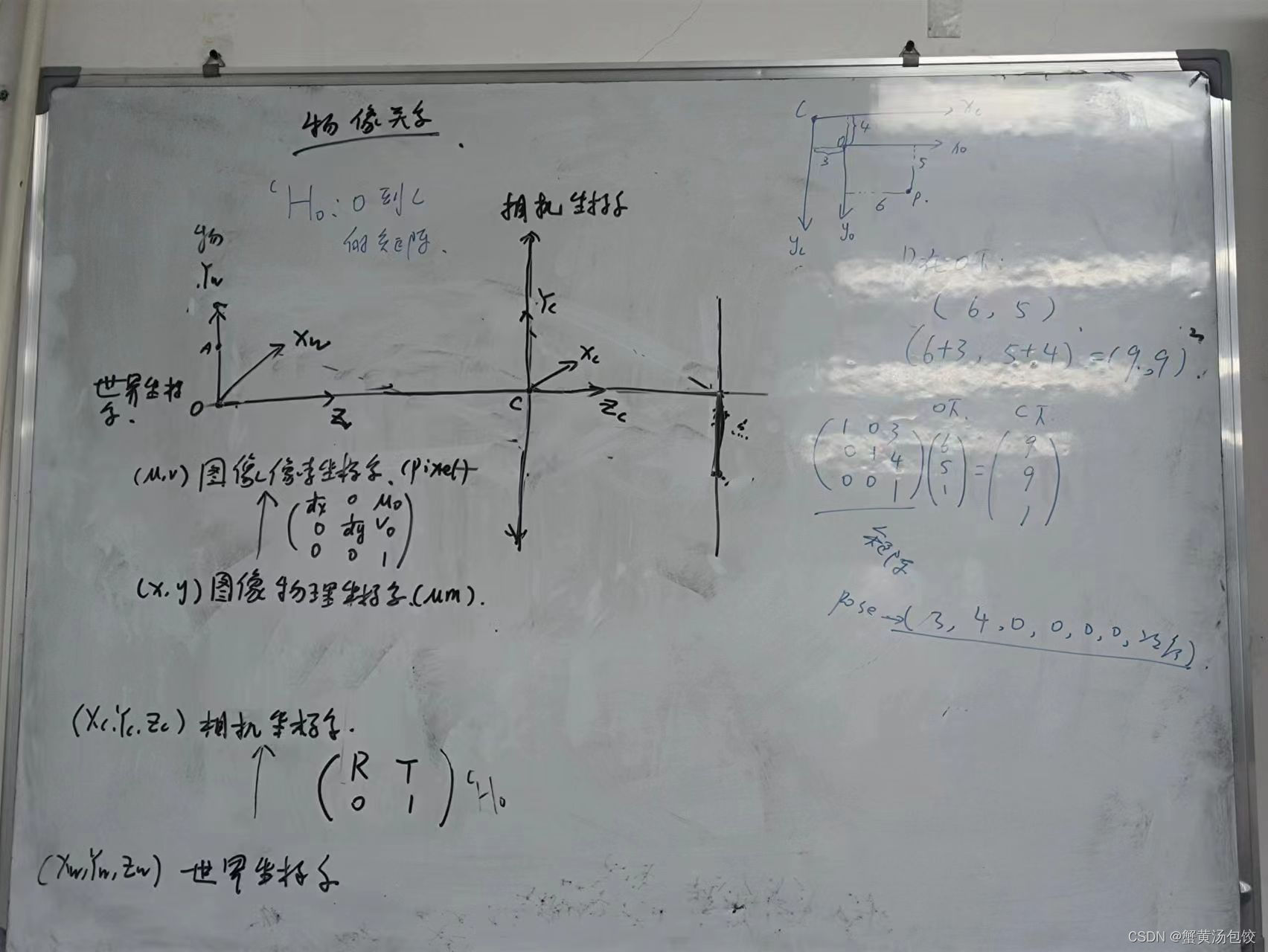
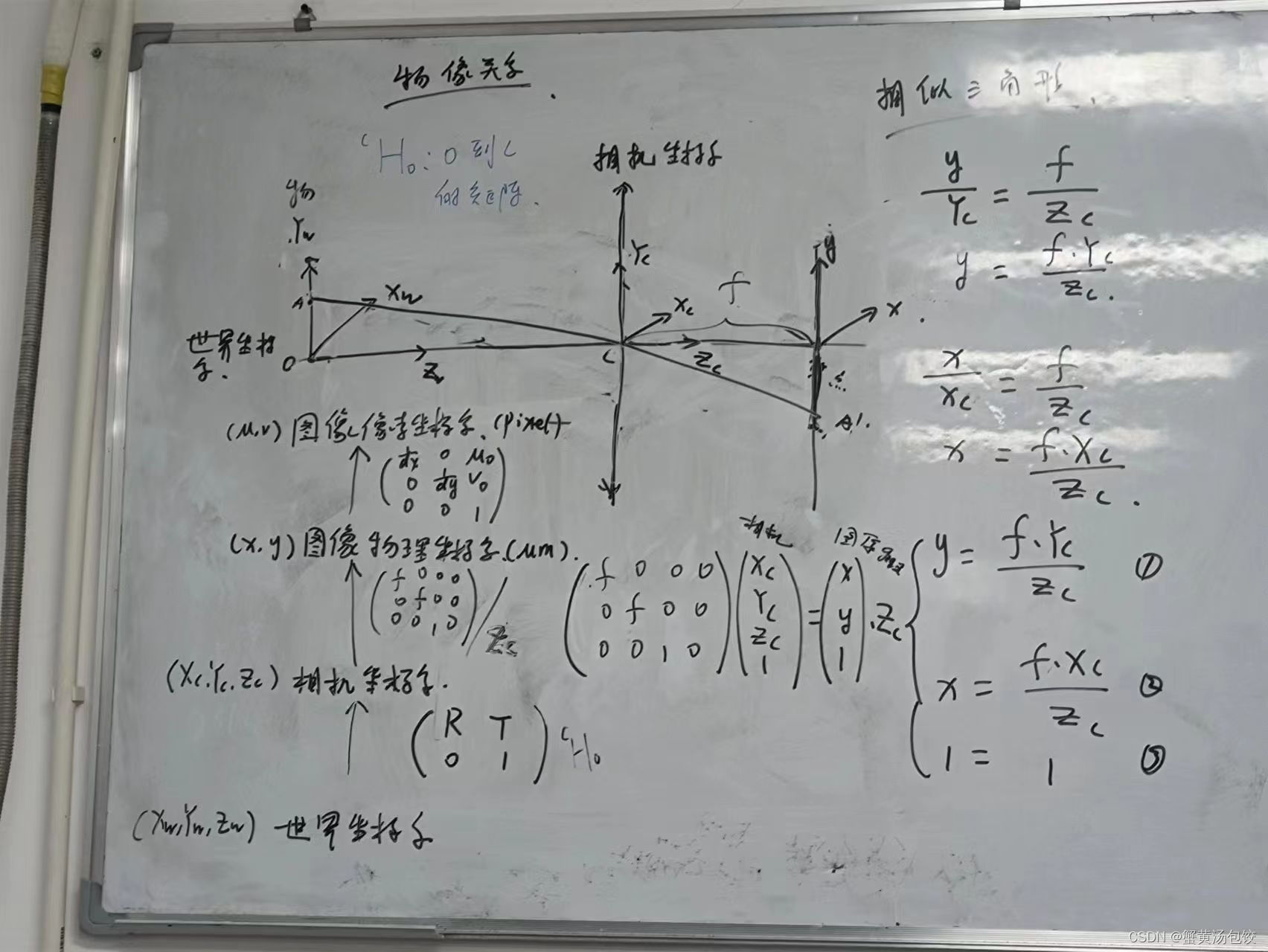
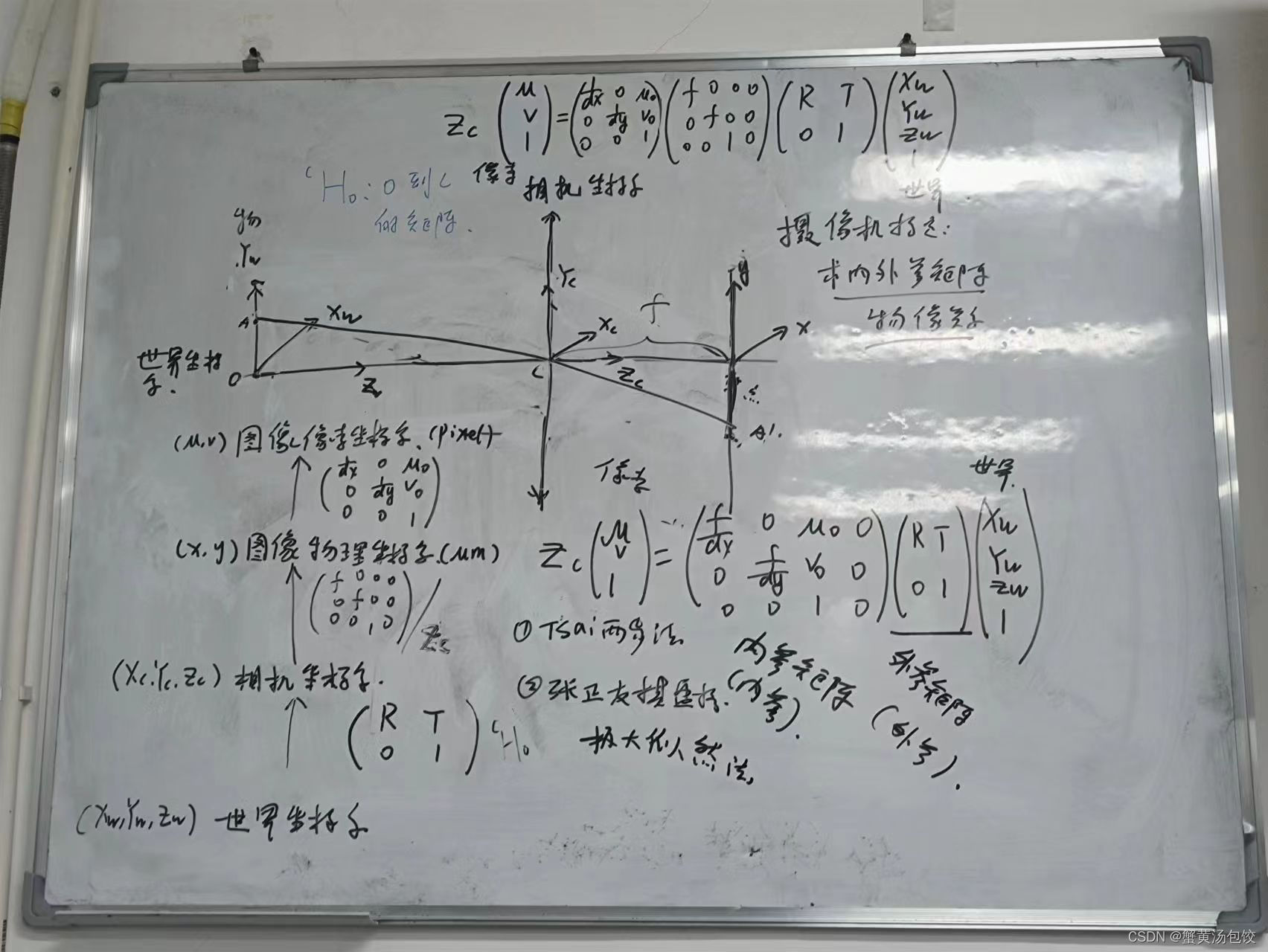
求摄像机的内外参数--灵活 像--物关系
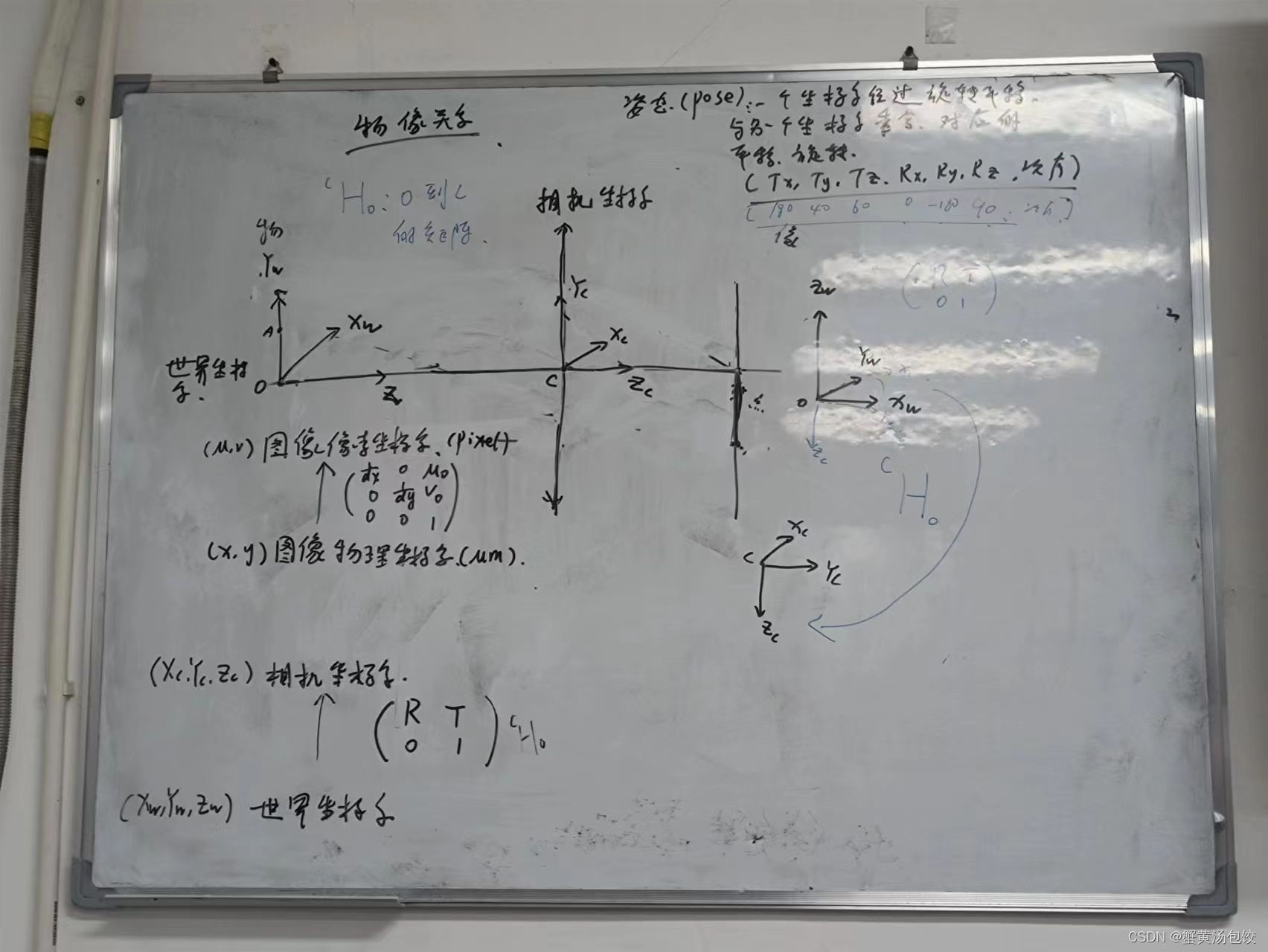
内参:相机坐标系--》像素 外参:世界坐标系--》相机坐标系
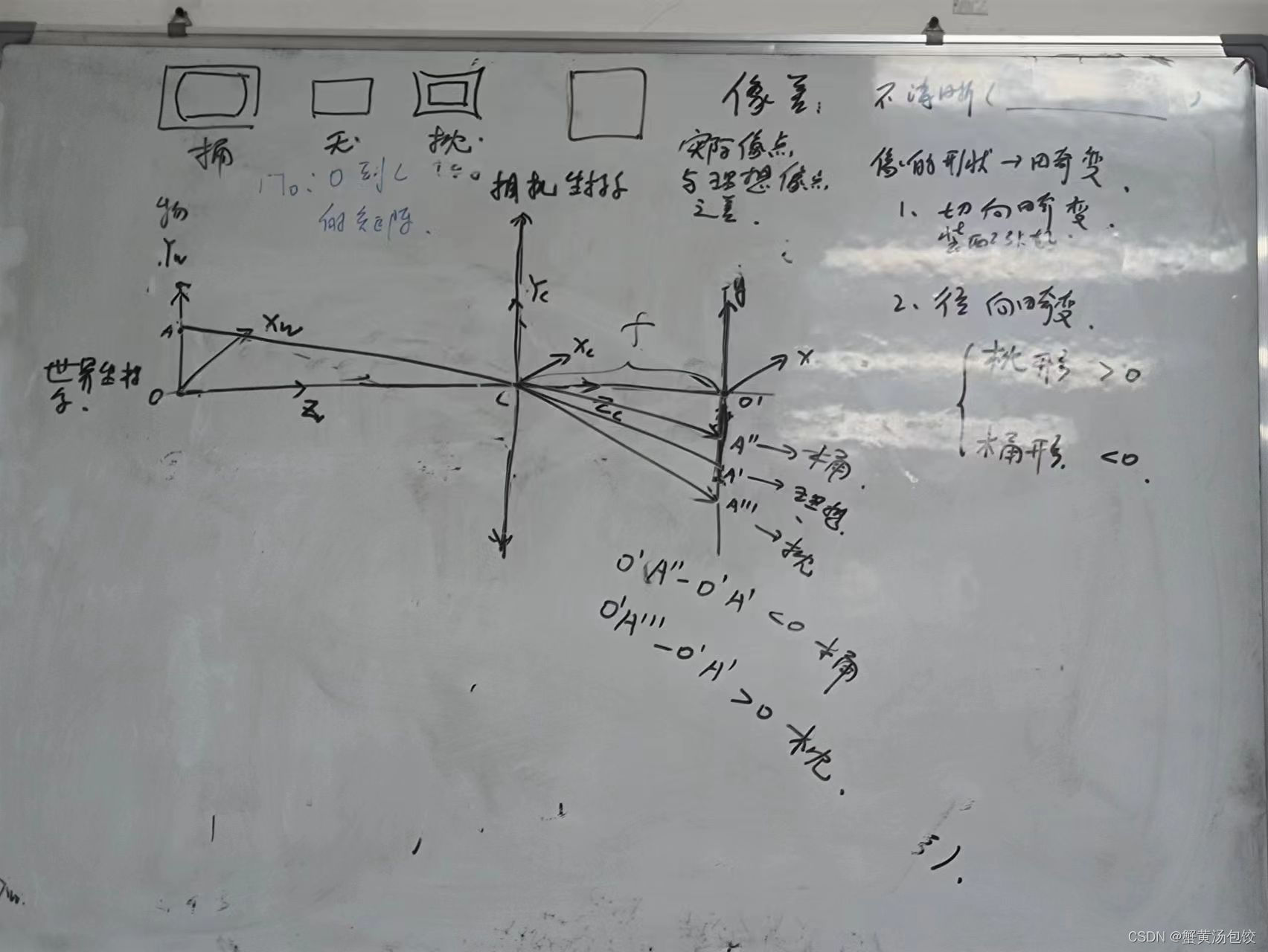
像差:理想的像点与实际像点之差 形状:畸变(切向 径向(桶形 枕形))
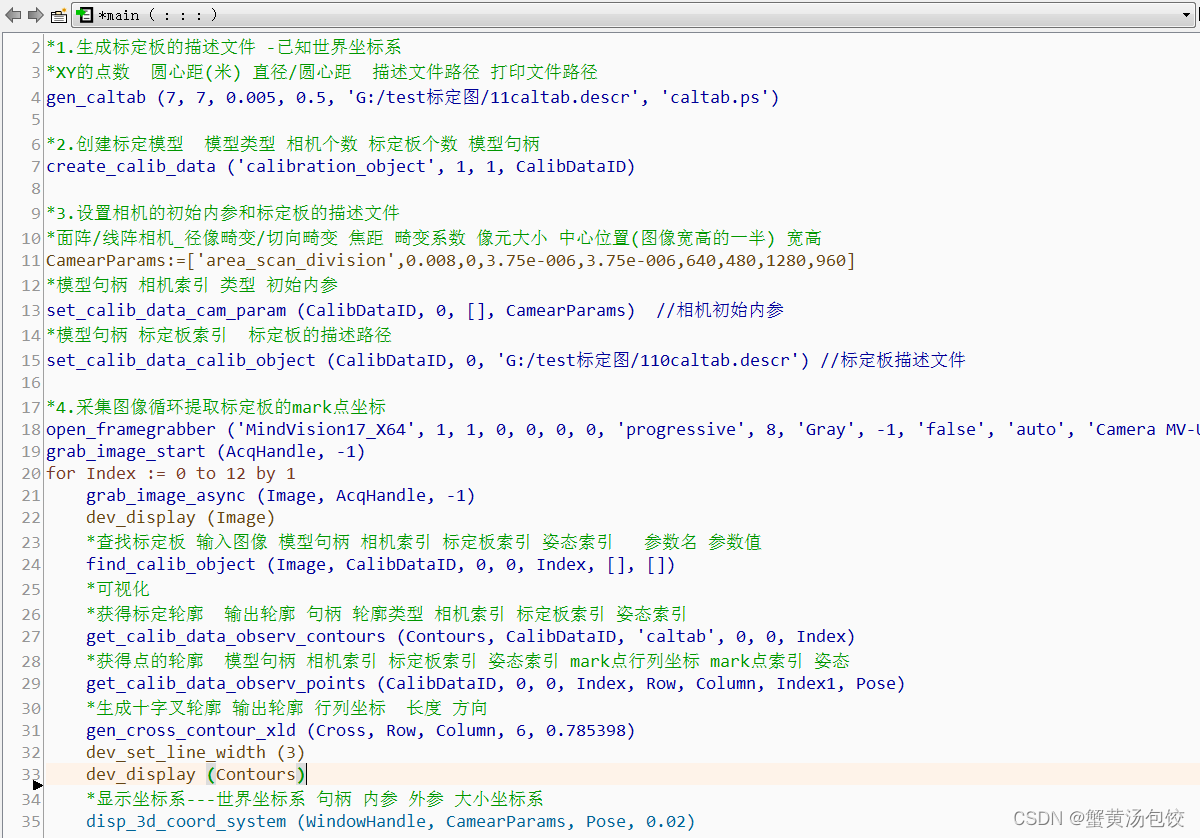
标定的流程:
1 生成描述文件gen_caltab --》
2 创建标定模型create_calib_data-》
3 设置初始相机内参以及标定板的描述文件set_calib_data_cam_param 和set_calib_data_calib_object---》
4 循环拍照查找标定板find_calib_object--》
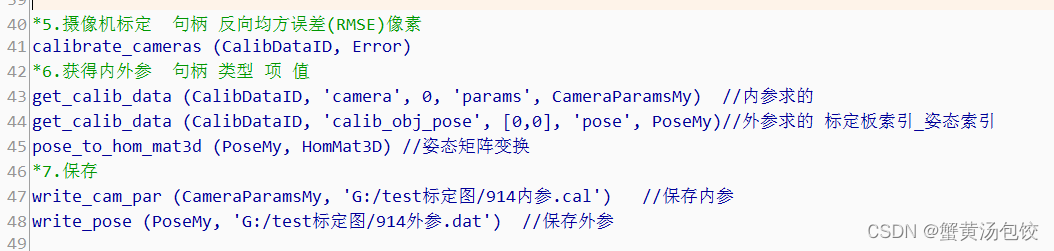
5 摄像机标定calibrate_cameras-》获得内外参/ get_calib_data
6 保存write_cam_par(内参) write_pose(外参)
错误:Minimum threshold while search for ellipses(没有找到点)--调节焦距 调节参数
多张拍图的注意事项:
1 拍多张(10张左右)外参一张够了 内参才是多张
2 圆形阵列板拍全 一般标定图像占视野的三分之一到三分之二左右
3 标定板图像尽量每个视野位置都走动
4 标定板带倾斜(为了内参更加准确)
5 标定板尽量多旋转
6 尽量标定板对比度好 成像清晰
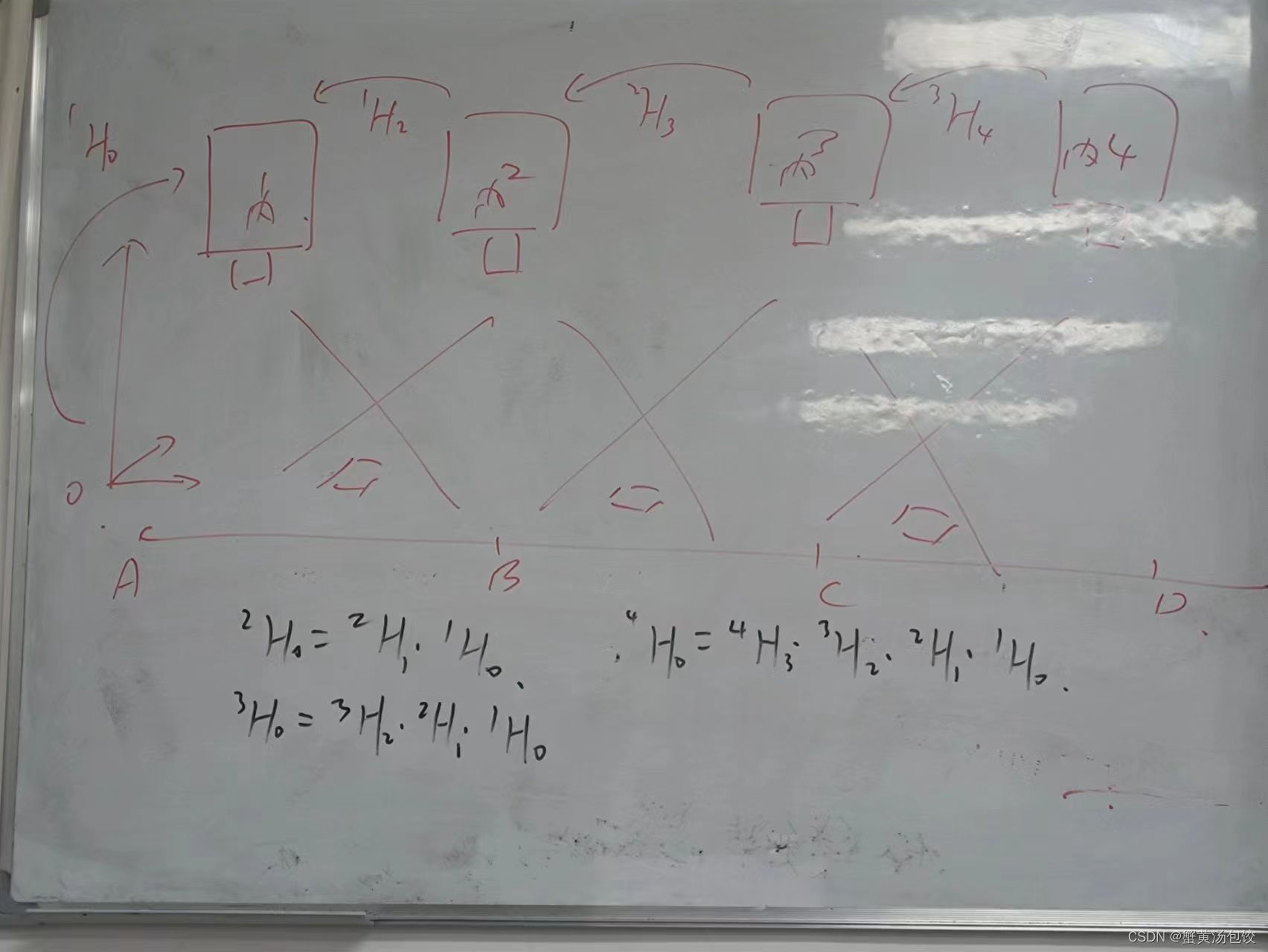
原理推到矩阵的变换:
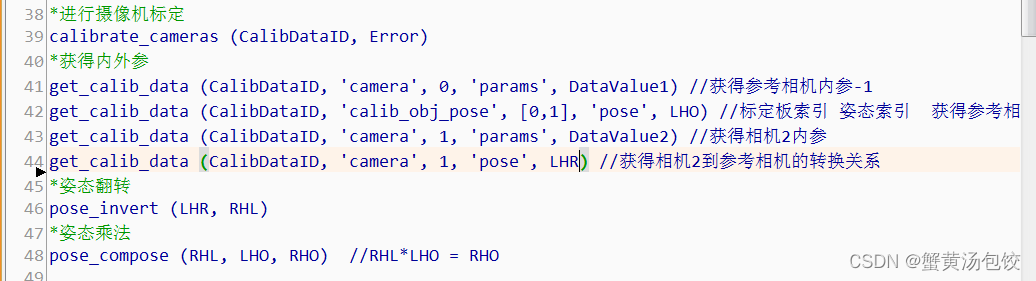
二、双相机标定
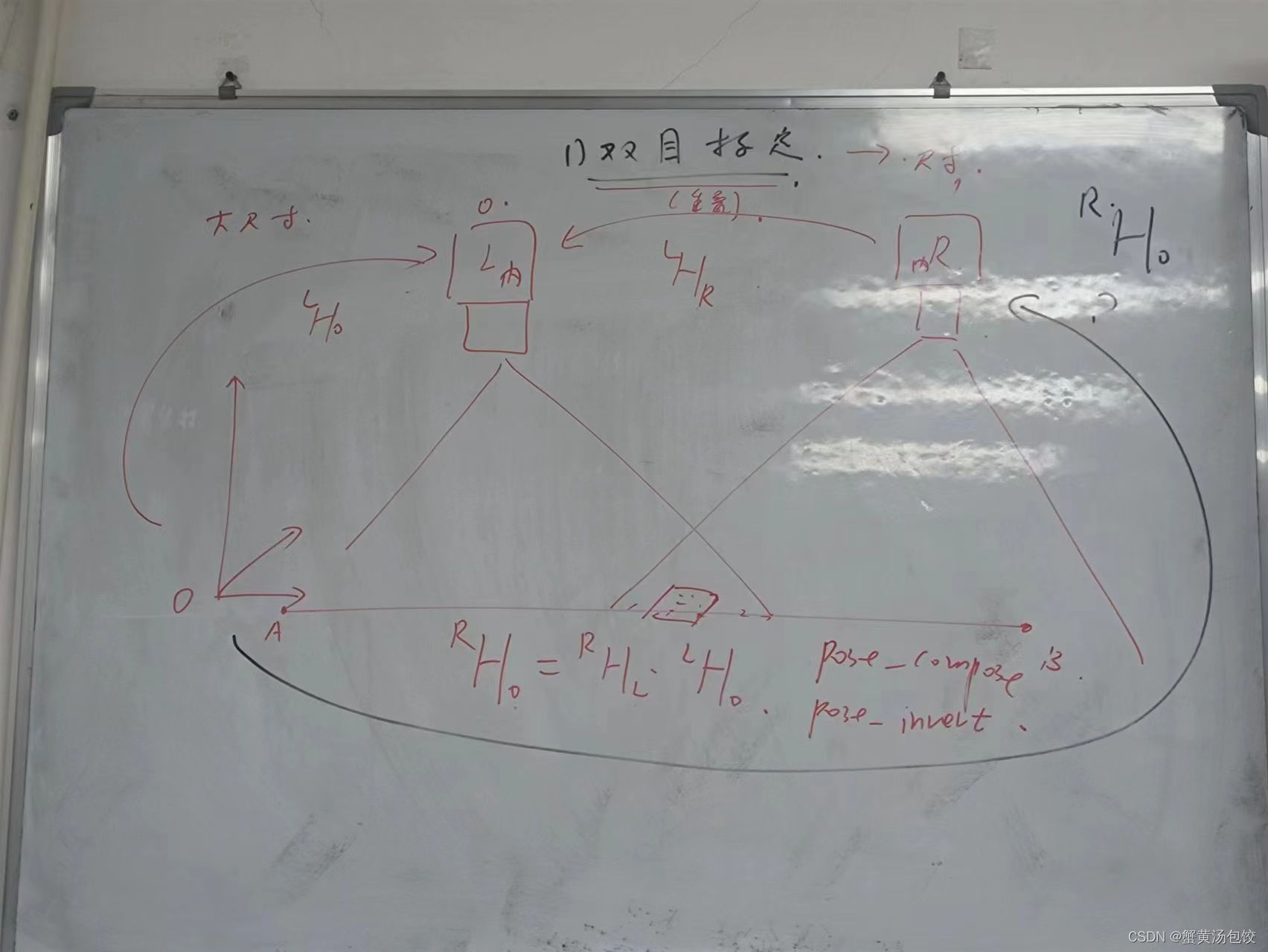
*姿态翻转
pose_invert (LHR, RHL)
*姿态乘法
pose_compose (RHL, LHO, RHO) //RHL*LHO = RHO
本质是将俩个相机统一坐标系
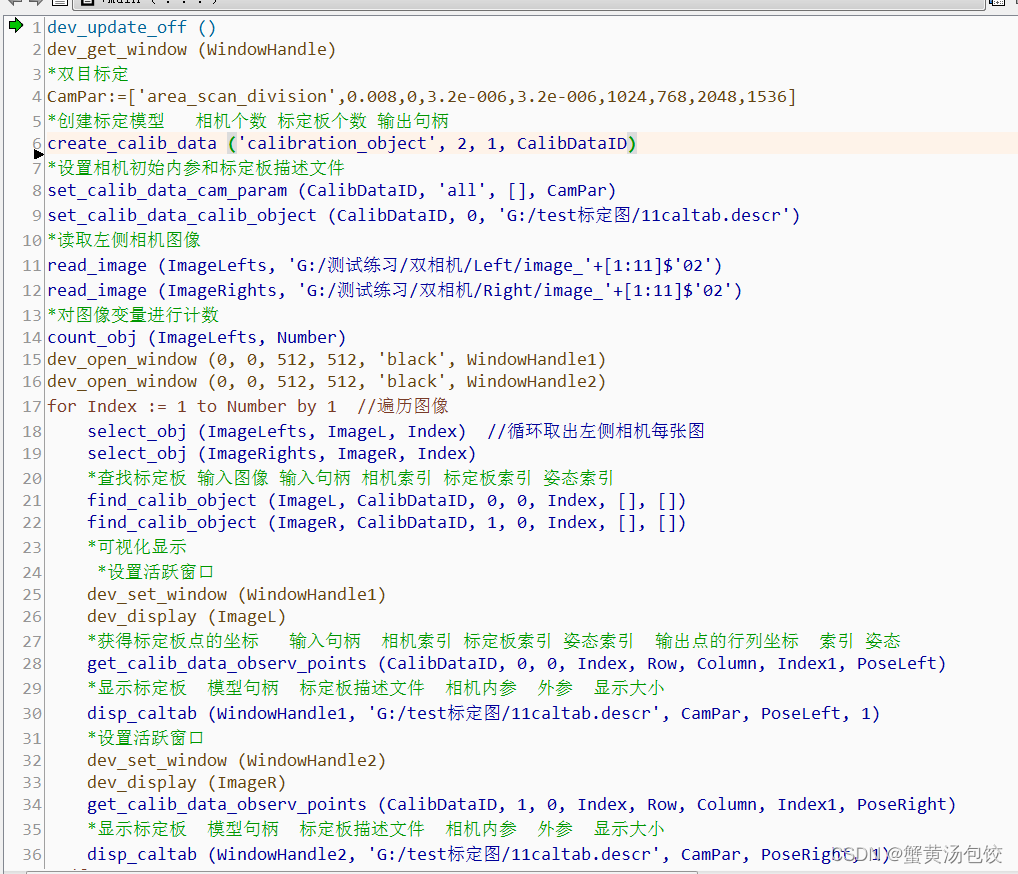
1.创建标定模型(2个相机,一个标定板)
2.设置相机初始内参,标定板描述文件
3.采集图,查找标定板
4.摄像机标定,获得内外参
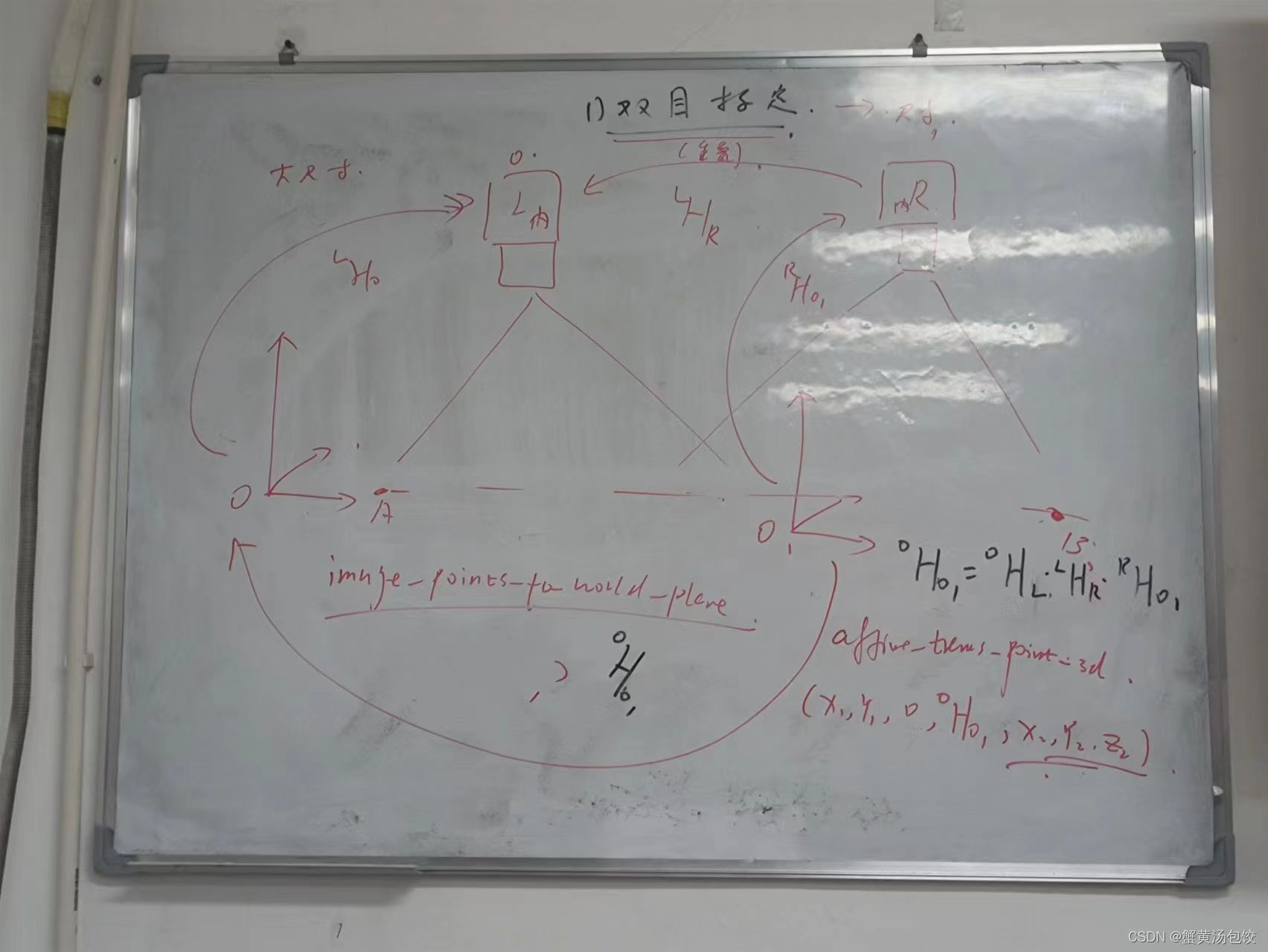
获得参考相机内外参,相机2的内参
获得相机2到参考相机(相机1)的转换关系
根据理论推导得到,需要将转换关系翻转,再用姿态乘法,得到相机2在o下的外参,此时就是统一了相机坐标系















 5244
5244











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









