






1.Soliworks导出 URDF文件
注意:似乎只有装配图才可以导出urdf格式文件,而单个零件图不行。
1.1 Soliworks下载与安装 (贴SW2022的下载安装方法 该主网站还有其他版本)
1.1.1 Soliworks 2022下载方法与网站:
http://www.zhanshaoyi.com/18725.html
1.1.2 Soliworks 2022安装与破解方法:
http://www.zhanshaoyi.com/18741.html
1.1.3 压缩包解压密码:
rjzkgzh
1.2 安装Soliworks 的urdf格式导出插件 SolidWorks to URDF Exporter
1.2.1 插件下载地址:Windows系统直接下载.exe文件安装就行:
http://wiki.ros.org/sw_urdf_exporter
进入网站后点击如下图标:
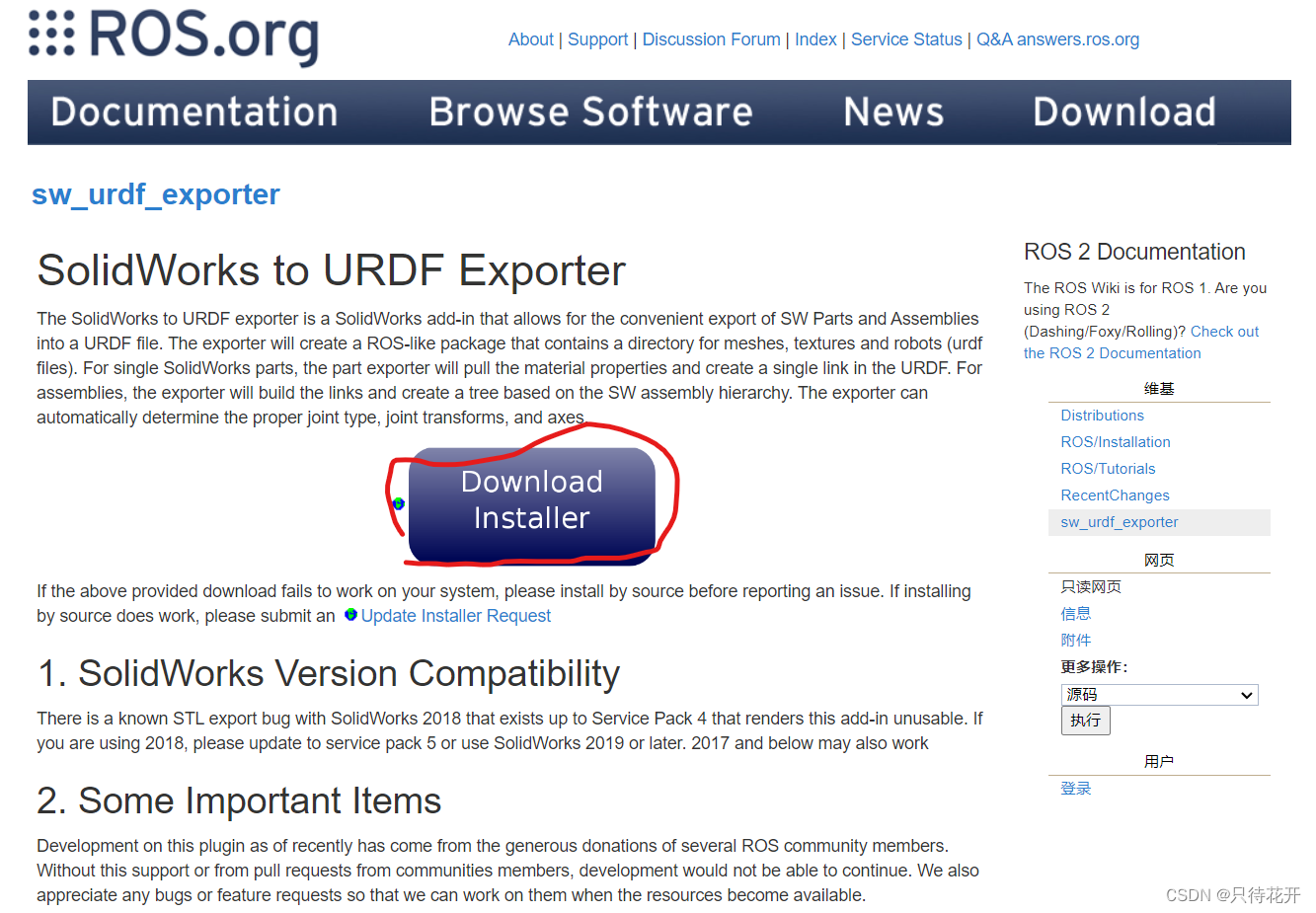
windows端选择你SW对应版本的插件的 sw2urdfSetup.exe 文件下载:

1.2.2 插件安装成功后,打开SW的插件栏可见如下:


1.3 设置装配体的参考坐标系(ROS进行运动仿真的坐标系)
注:对象是装配体最好,单个零件好像不行。
1.3.1 base基坐标系与推进器坐标系创建:
A.先创建参考点:
1.鼠标选择装配体 2.鼠标选择参考几何体 3.鼠标选择点

B.点的位置选取:
在所有零件与装配件对象中选一个参考对象(这个点在哪个物体上)
这里根据模型需要而选择,我选的舱面,它会自动显示出面中心点,我选该点作为参考点
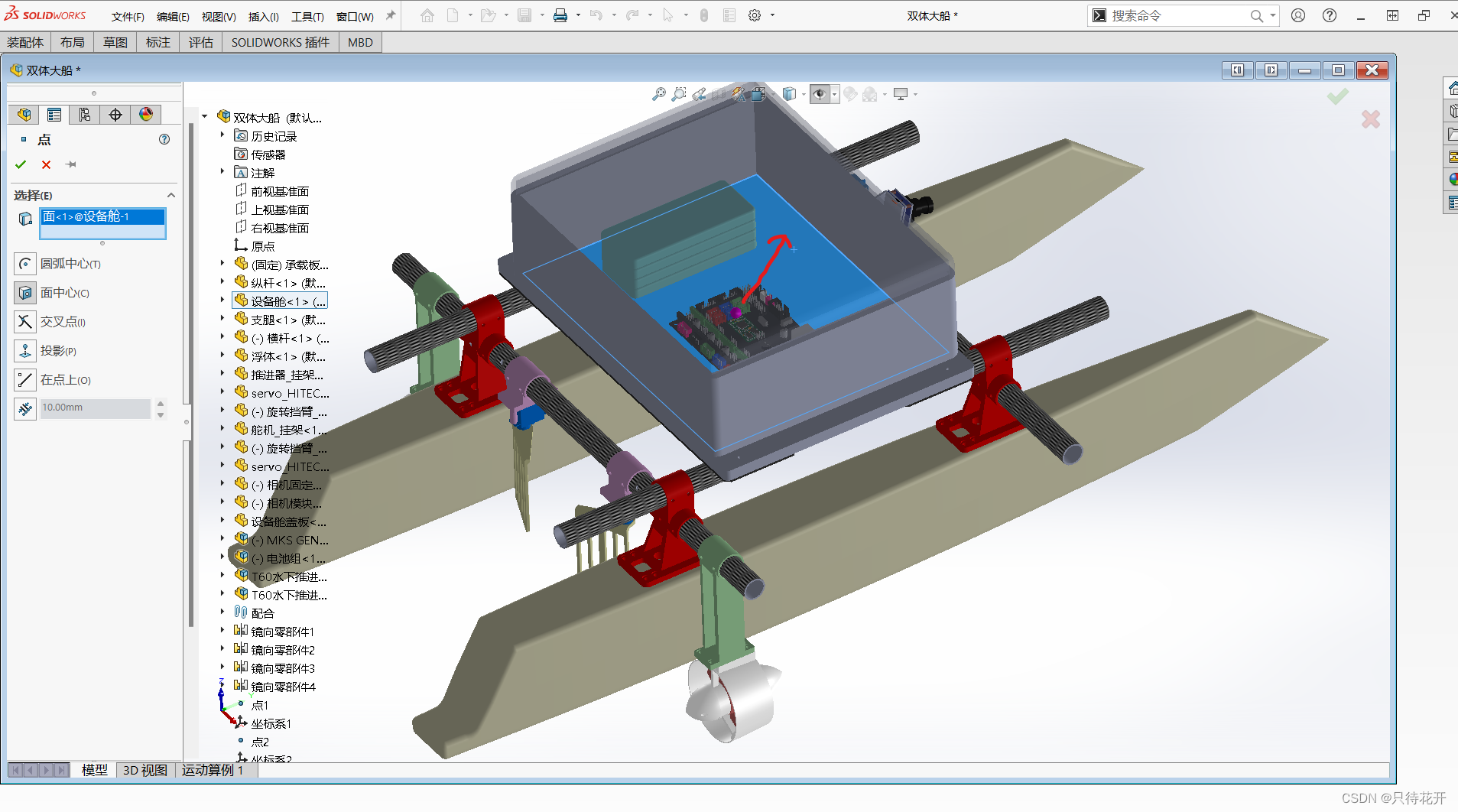
C.坐标系选取

如下图,我们选择刚刚创建的点对象作为坐标系原点,然后调整坐标系三轴的指向:

同理我们给机器人的左右推进器也各创建一个坐标系:
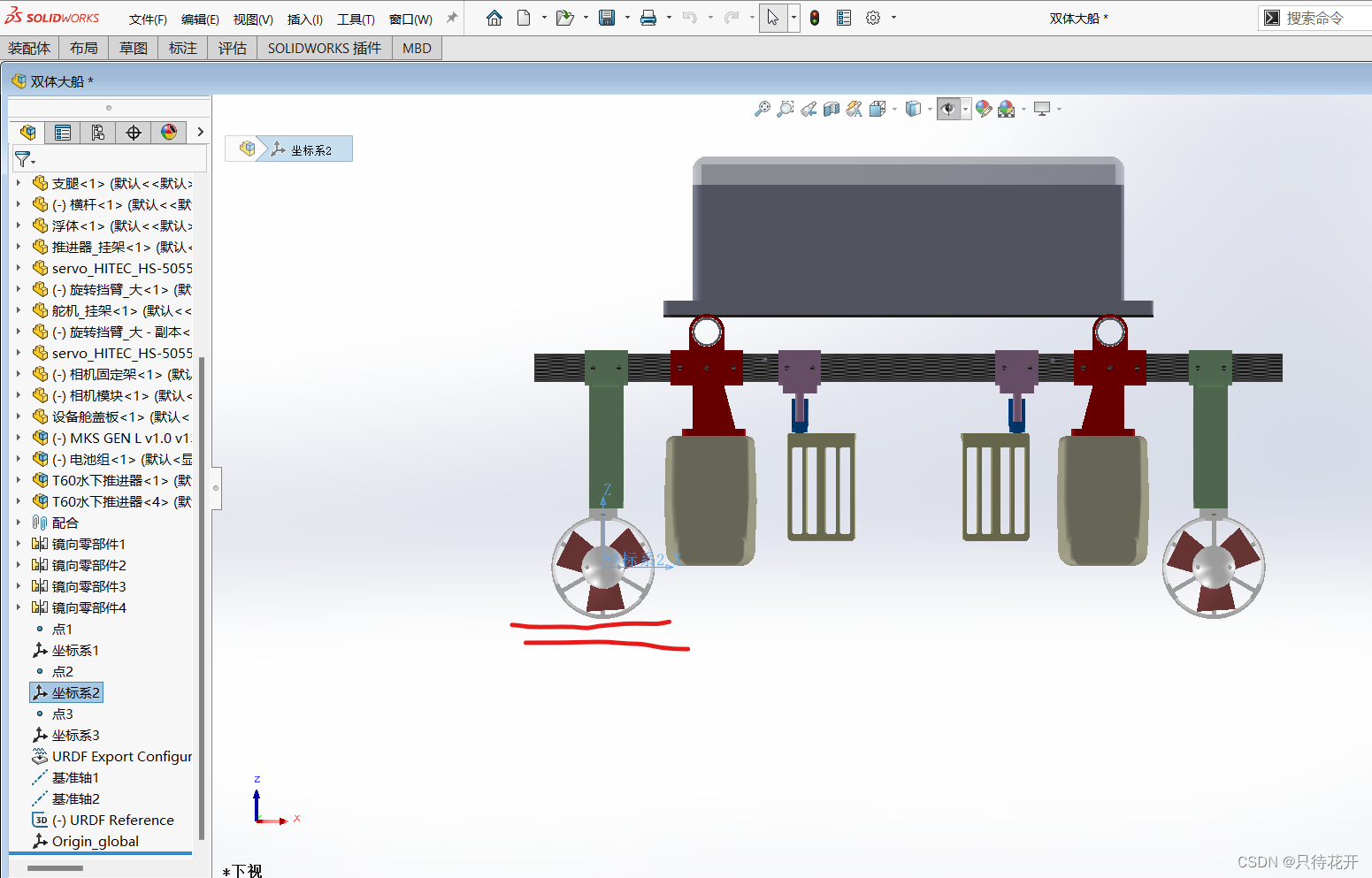
再指定一下推进器的旋转轴:
1.鼠标选择装配体 2.鼠标选择参考几何体 3.鼠标选择基准轴

我选择我的推进器的圆柱面,它会自动显示出一条轴线,点击 勾 号完成创建:
右电机坐标系与旋转轴同理

1.3.2 urdf模型导出
A 1.鼠标选择 工具 2.鼠标选择 Tools 3.鼠标选择 Export as URDF :

B 基坐标系 base_link选取: 我选坐标系1

C 坐标系对象选取:我选择右边的总装配体对象(鼠标点击就好)
D 子坐标系选择:在如下左图部分的base_link处 右键选择 Add Child Link 添加坐标系,然后点击选择新建的坐标系,如下 右图配置(选择对应坐标系2 ,对应轴系:基准轴:轴1,坐标系类型:continuous,对应对象:推进器)


E 以上完成之后,点击上右图红色处 Preview and Export ... 导出对应urdf文件,保存时最好用英文命名,这样导出的文件直接就可以放到ROS工作空间去编译运行自动生成的rviz与gazebo 的launch文件了。
续更...
















 202
202











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











