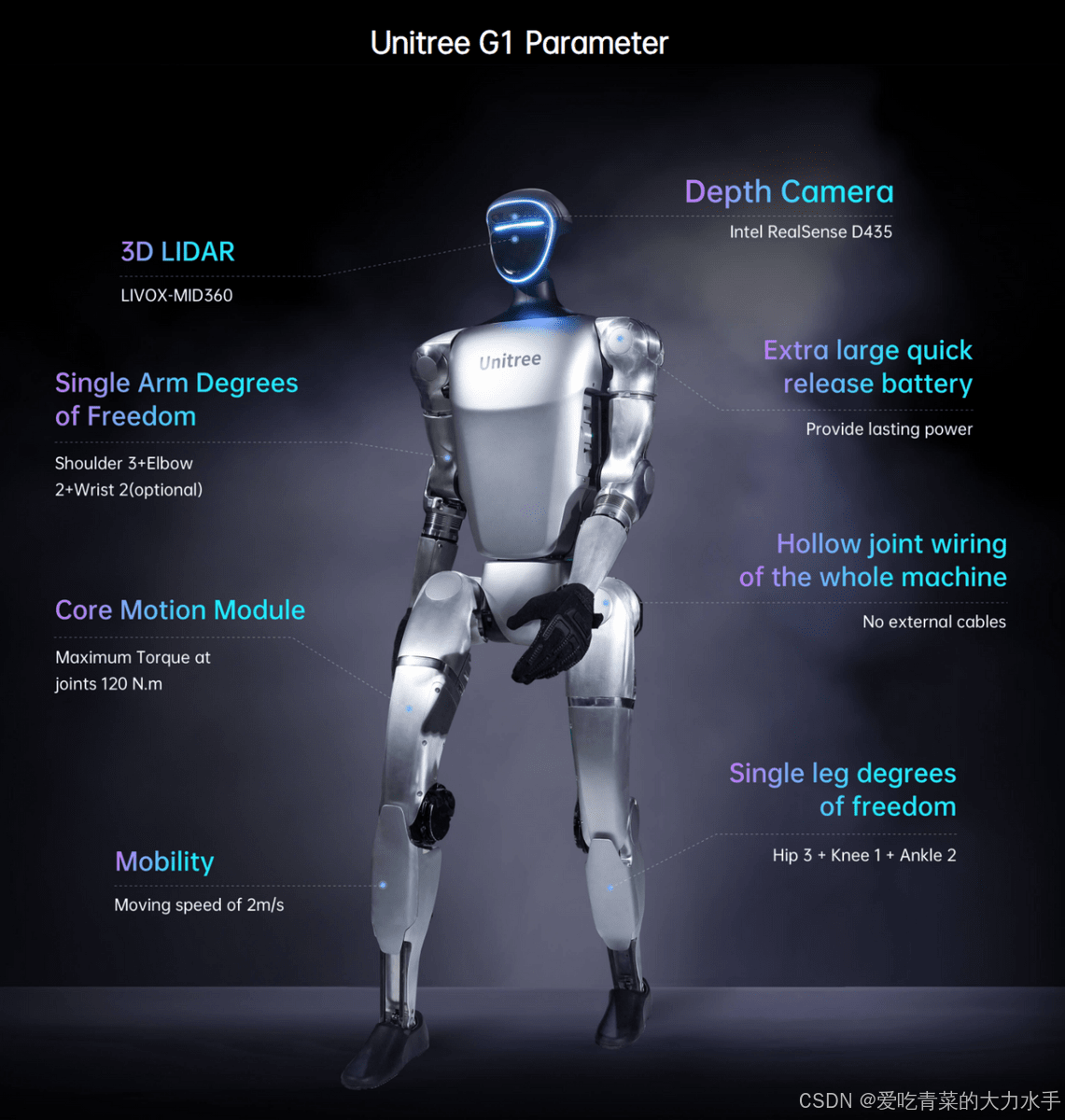
无论你是哪个行业的开发人员,G1这里都有值得学习的地方! 一、硬件架构与技术图谱 1. 核心驱动单元:高精度关节模组 G1的关节模组采用 自研一体化设计,整合了以下核心组件: 无框力矩电机: 最大扭矩达 120Nm(EDU版本),支持瞬时过载能力,通过双编码器实现位置与速度的闭环控制。 响应时间 <1ms,满足动态平衡与快速动作需求。 行星减速器: 减速比优化设计(约 10:1),兼顾高扭矩输出与低背隙(<0.1°),确保运动精度。 双编码器系统: 主编码器(磁编码器):用于电机转子位置检测,分辨率 17bit/rev。 副编码器(光学编码器):检测输出端位置,精度








 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 395
395

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








