






安装vins-mono需要的库和ros的安装就不介绍了,由于ubuntu20.04下的ros自带的是opencv4,vins-mono依赖opencv3,本文参考众多大佬的博客最终成功用自己安装的opencv3.4.1编译成功,主要思路是重新编译一个cv_bridge专门用于编译vinsmono调用opencv3。
ubuntu20.04版本的cv_bridge下载链接如下:https://github.com/ros-perception/vision_opencv/tree/noetic
第一步:下载cv_bridge并调用自己安装的opencv版本
下载后首先将其中的cv_bridge文件夹移到catkin_ws/src目录下,并重新命名为cv_bridge_vinsmono;(自定义)
CMakeLists.txt中的project(cv_bridge)改为cv_bridge_vinsmono;
package.xml中name也改为cv_bridge_vinsmono。
注意:此时还没有将vins-mono-master加入src文件夹。
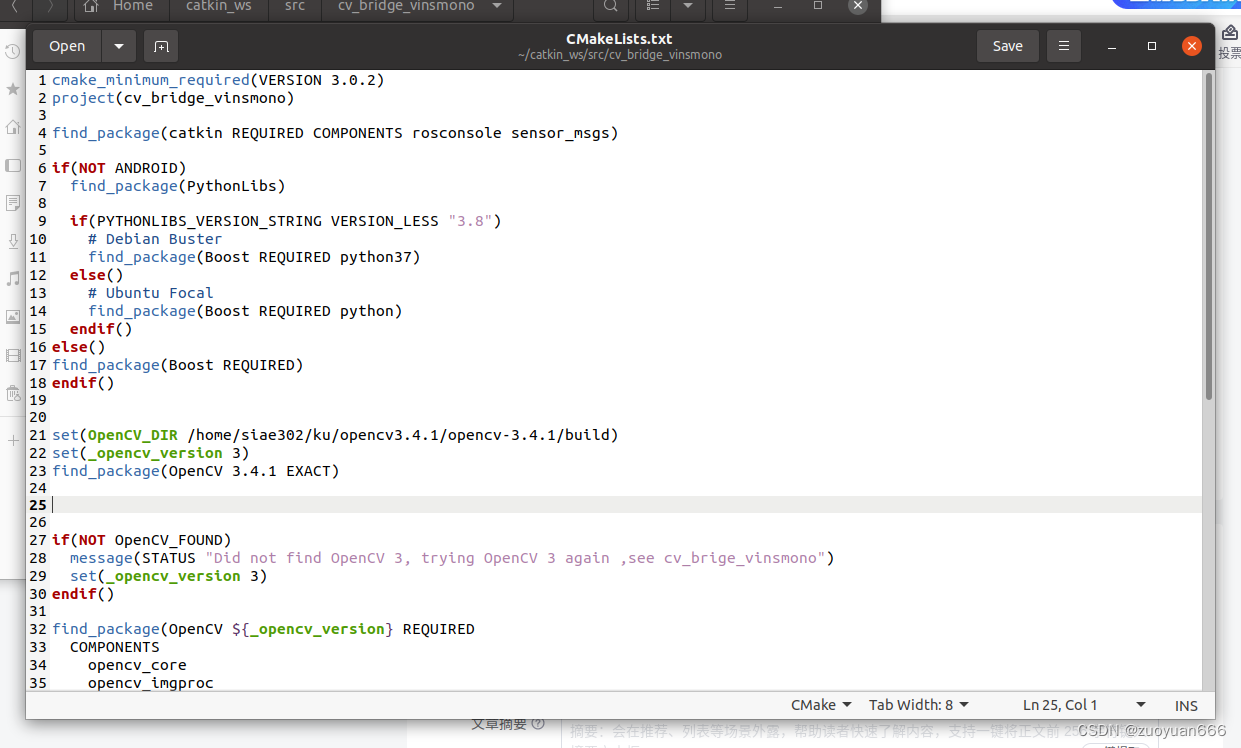
接下来在cmakelists.txt中指定我们的opencv包和路径:
set(OpenCV_DIR /home/siae302/ku/opencv3.4.1/opencv-3.4.1/build)
set(_opencv_version 3)
find_package(OpenCV 3.4.1 EXACT)
至此,cv_bridge_vinsmono制定opencv版本完毕,进行编译,在catkin_ws目录下执行:
catkin_make --pkg cv_bridge_vinsmono如果一切顺利就不会报错,报错了也别慌,csdn搜一下也能解决,我很顺利没有报错。
[ 66%] Building CXX object cv_bridge_vinsmono/src/CMakeFiles/cv_bridge_vinsmono_boost.dir/module_opencv4.cpp.o
[ 83%] Building CXX object cv_bridge_vinsmono/src/CMakeFiles/cv_bridge_vinsmono_boost.dir/module.cpp.o
[100%] Linking CXX shared library /home/siae302/catkin_ws/devel/lib/python3/dist-packages/cv_bridge_vinsmono/boost/cv_bridge_vinsmono_boost.so
[100%] Built target cv_bridge_vinsmono_boost
第二步:使用cv_bridge_vinsmono
将vins-mono的所有cmakelists.txt文件中调用cv_bridge的部分替换为cv_bridge_vinsmono
;findpackage(opencv required)改为查找opencv3:
(1)将
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
image_transport
sensor_msgs
cv_bridge
message_filters
camera_model
)改为:
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
image_transport
sensor_msgs
cv_bridge_vinsmono
message_filters
camera_model
)(2)将
find_package(OpenCV REQUIRED)
改为:
#使用opecncv3编译
#find_package(OpenCV REQUIRED)
find_package(OpenCV 3 REQUIRED)如下所示,但是没有调用cv_bridge和opencv的地方别画蛇添足,下面是其中一个cmakelists.txt文件的例子。
然后进入catkin_ws目录下编译vinsmono了,注意默认的catkin_make是全线程编译,如果你编译vinsmono的时候容易卡死,在home目录下的.bashrc文件添加下面这行代码(-j4的4你可以参考自己电脑性能线程数自定义),改完了别忘了source .bashrc:
export ROS_PARALLEL_JOBS=-j4
第三步:运行vinsmono
首先下载数据集:kmavvisualinertialdatasets – ASL Datasets
我下载的是MK-01ROSbag.
然后运行下列代码即可,注意每行指令都要另起一个终端:
roscore
roslaunch vins_estimator euroc.launch
roslaunch vins_estimator vins_rviz.launch
rosbag play MH_01_easy.bag #实际应该是rosbag play YOUR_PATH_TO_DATASET/MH_01_easy.bag参考链接:Ubuntu20.04——一篇文章让你从零配置VINS_Mono环境以及运行(2023年最新)_黑灯瞎火正是学习之时的博客-CSDN博客
解决 cv_bridge 与 opencv4 版本冲突问题_Thoven的博客-CSDN博客
CV_bridge和ROS自带的opencv版本冲突_ros自带opencv吗_蘭奕的博客-CSDN博客
ROS学习:cv_bridge与opencv版本冲突三种解决方案_Mr.Qin_的博客-CSDN博客
将ros cv_bridge关联到自己安装的Opencv版本_/usr/bin/ld: warning: libopencv_core.so.3.2, neede_张飞飞~的博客-CSDN博客














 617
617











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









