







ABB机器人雕刻码垛工作站建立过程
- 建立机器人系统
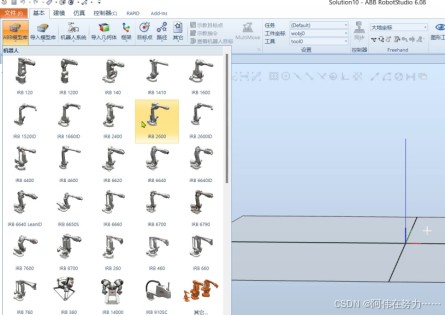
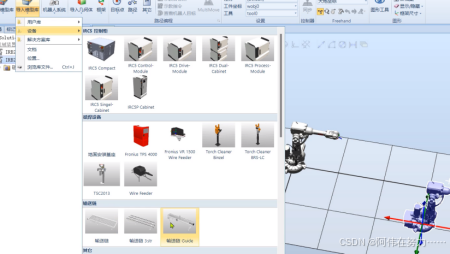
- 加载模型(导入IRB2600机器人两个,托盘一个,吸盘一个,输送链一条,工件一个)
- 将吸盘拖动到robot1,my tool拖动至robot2,并更新位置信息
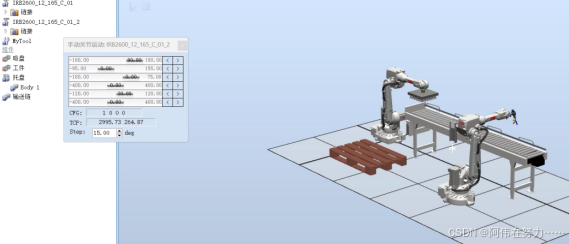
- 通过手动关节运动调整机器人的位姿,使其到达合适的位置
(robot1关节5调整90°,robot2关节1调整90°)
- 点击机器人系统,从布局创建系统(点击选项)

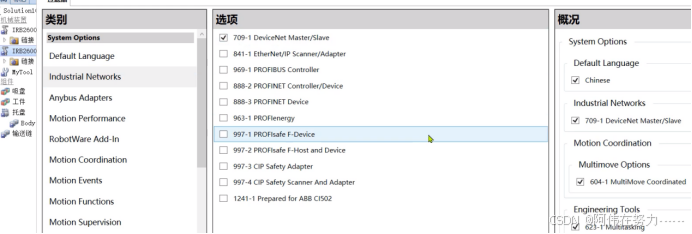
右下角控制器状态变绿,即为系统创建成功。
- 添加Smart组件
- 输送链组件:
Timer:
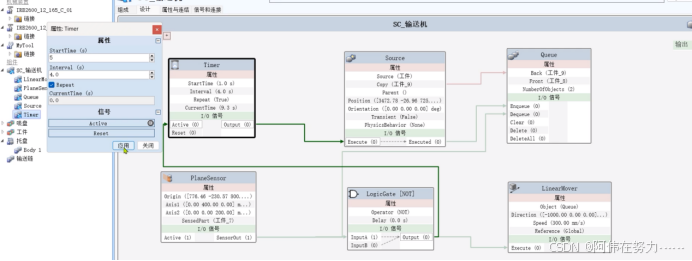
PlaneSensor:
ABB机器人雕刻码垛工作站建立过程
(robot1关节5调整90°,robot2关节1调整90°)
右下角控制器状态变绿,即为系统创建成功。
Timer:
PlaneSensor:
 1921
1万+
1921
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























