



环境要求
测试版本:
Ubuntu :20.04 LTS
ROS :ROS Noetic
安装步骤
1.安装VRPN库
sudo apt-get update
sudo apt install ros-noetic-vrpn
2.拷贝文件至ros工作路径下解压
mkdir -p ~/vrpn_client_ros/src
cd ~/vrpn_client_ros/src
git clone https://github.com/ros-drivers/vrpn_client_ros.git
cd ~/vrpn_client_ros
catkin_make
3.编译完成后,需要更新.bash
source devel/setup.bash
4.运行代码
运行程序程序前,请确认ros的工作路径。建议每次启动前在准备使用的工程目录下执行步骤3。
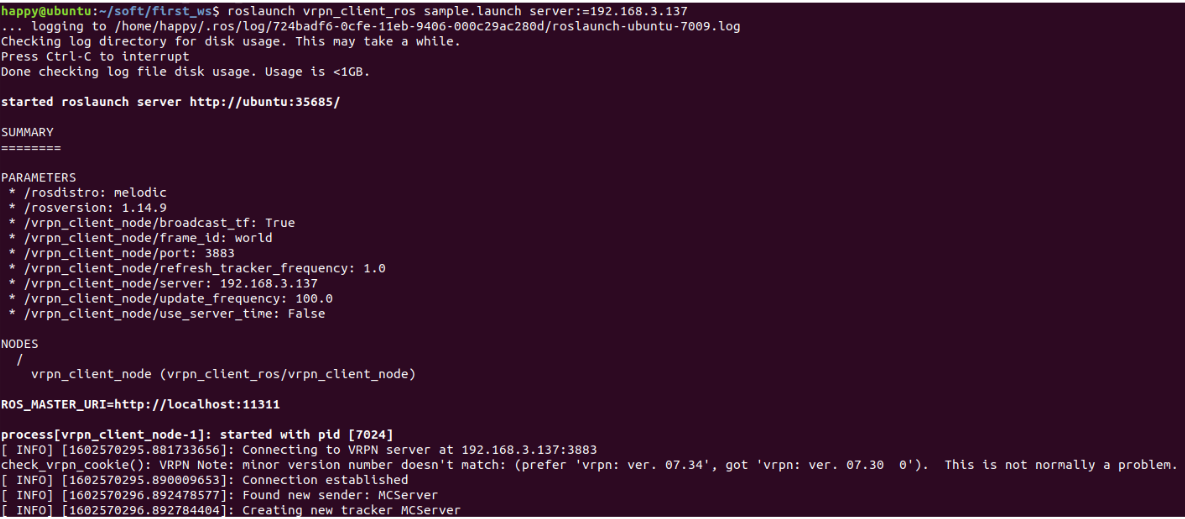
方式一
roslaunch vrpn_client_ros sample.launch server:=192.168.0.200
方式二
先修改 vrpn_client_ros/launch 文件,如下图
sensor_id:true #启用物体id标识
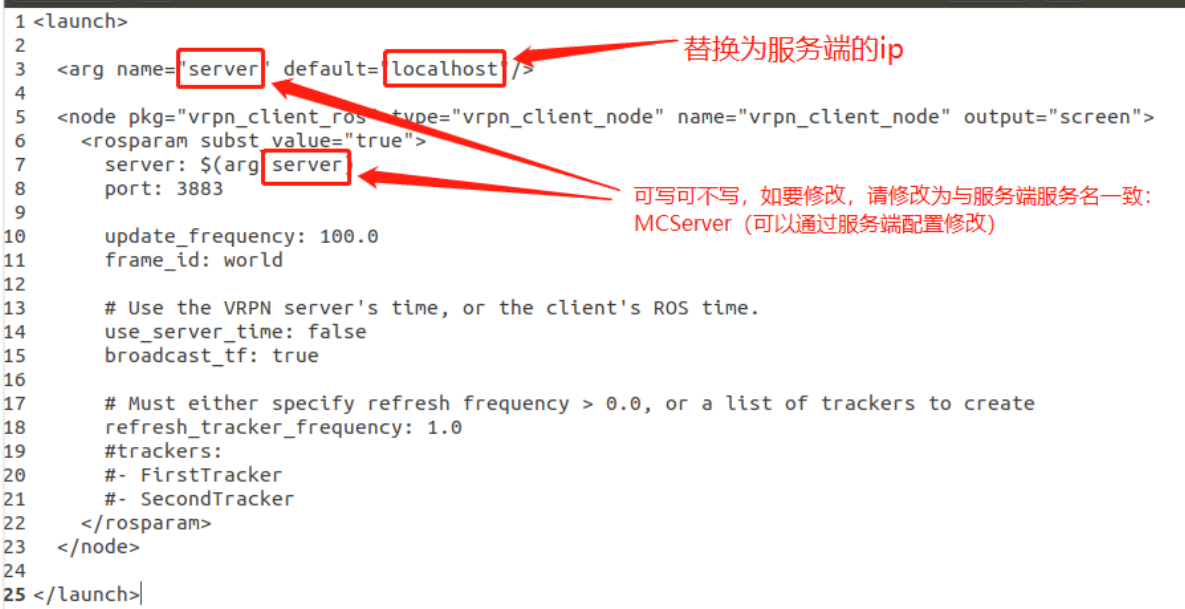
roslaunch vrpn_client_ros sample.launch
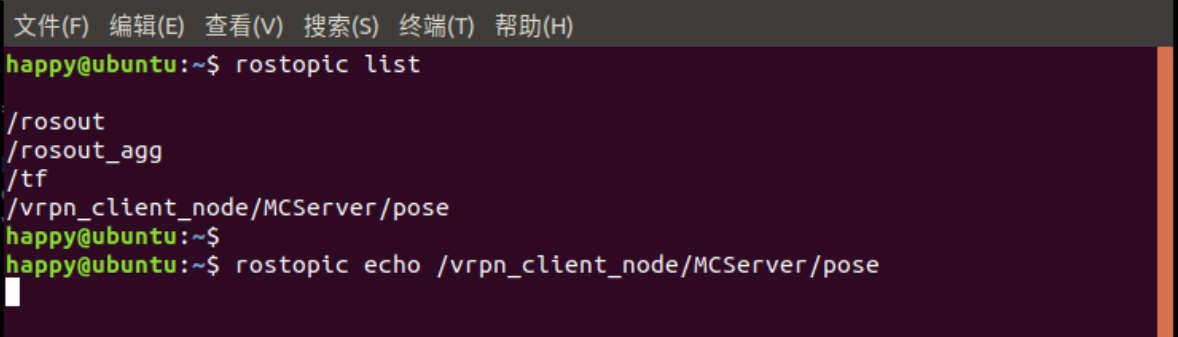
5.查看接收到的数据
rostopic list
rostopic echo /vrpn_client_node/MCServer/pose

















 23万+
23万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









