









学习大佬的文章,贴图来用
https://blog.csdn.net/dai93/article/details/89852241
这是输出流的大致示意
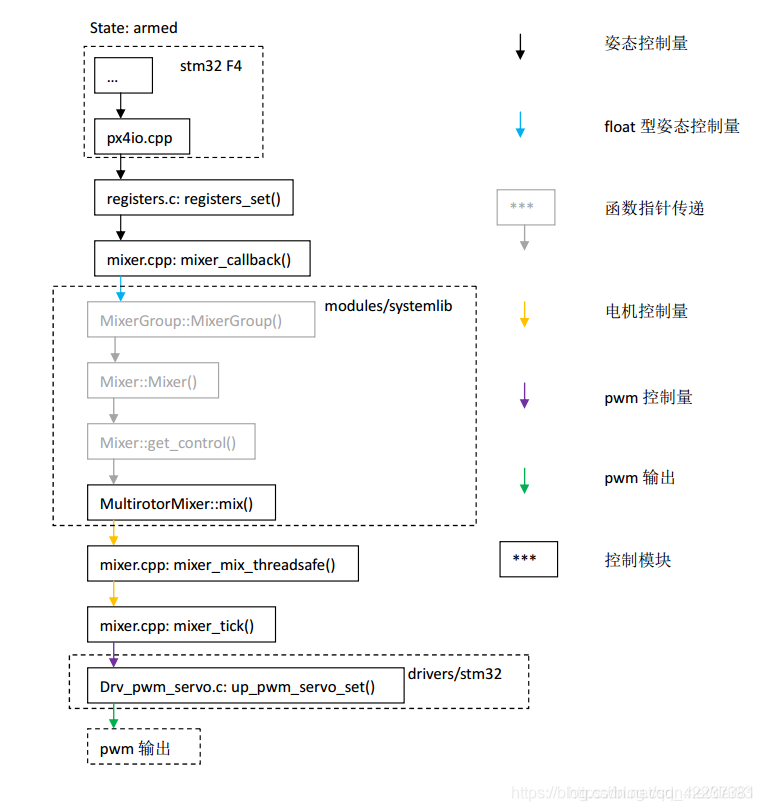
如果在飞控需要控制单独的舵机,可以自定义一个pwm通道输出,
在飞机机架设置添加
set PWM_AUX_OUT 123456
添加引用头文件#include <drivers/drv_pwm_output.h>到使用的代码文件里
使用下面的调用下面的函数即可
up_pwm_servo_set( channel, value)
其中channel是AUX通道编号,从0到6,value是pwm输出值。
这个函数是从混控器那块的调用,理论上上层直接调用是不合适的,但如果只是进行简单的单通道,比如控制开个降落伞什么的,只需要在运行的判断时机调用这个函数即可,比如我们可以在位置控制循环函数里判断,
当油门设定值小于零时
if(_att_sp.thrust <= 0)
{
up_pwm_servo_set( 0, 1800)
}
这样及时飞控板pixhawk的AUX out的0通道输出pwm2000,可以接到示波器上看到pwm输出

















 6947
6947

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









