







参考代码:LaneGAP
1. 概述
介绍:在车道拓扑结构建模描述中经常使用pixel-wise(基于分割)或piece-wise(小段车道检测并连接)方式,但是这样的方式并不是将一个lane完整建模和优化的,因而当某些细节单元上出现错误的时候就会对整条lane的感知产生影响。基于如此观察文章将lane描述为一个带方向的path,并完整预测path的几何结构,从而得到较为完成的path描述,一个场景的道路graph信息便是通过这些path组合起来的。
对于上述提到的3中建模方式其建模示意图见下图所示:
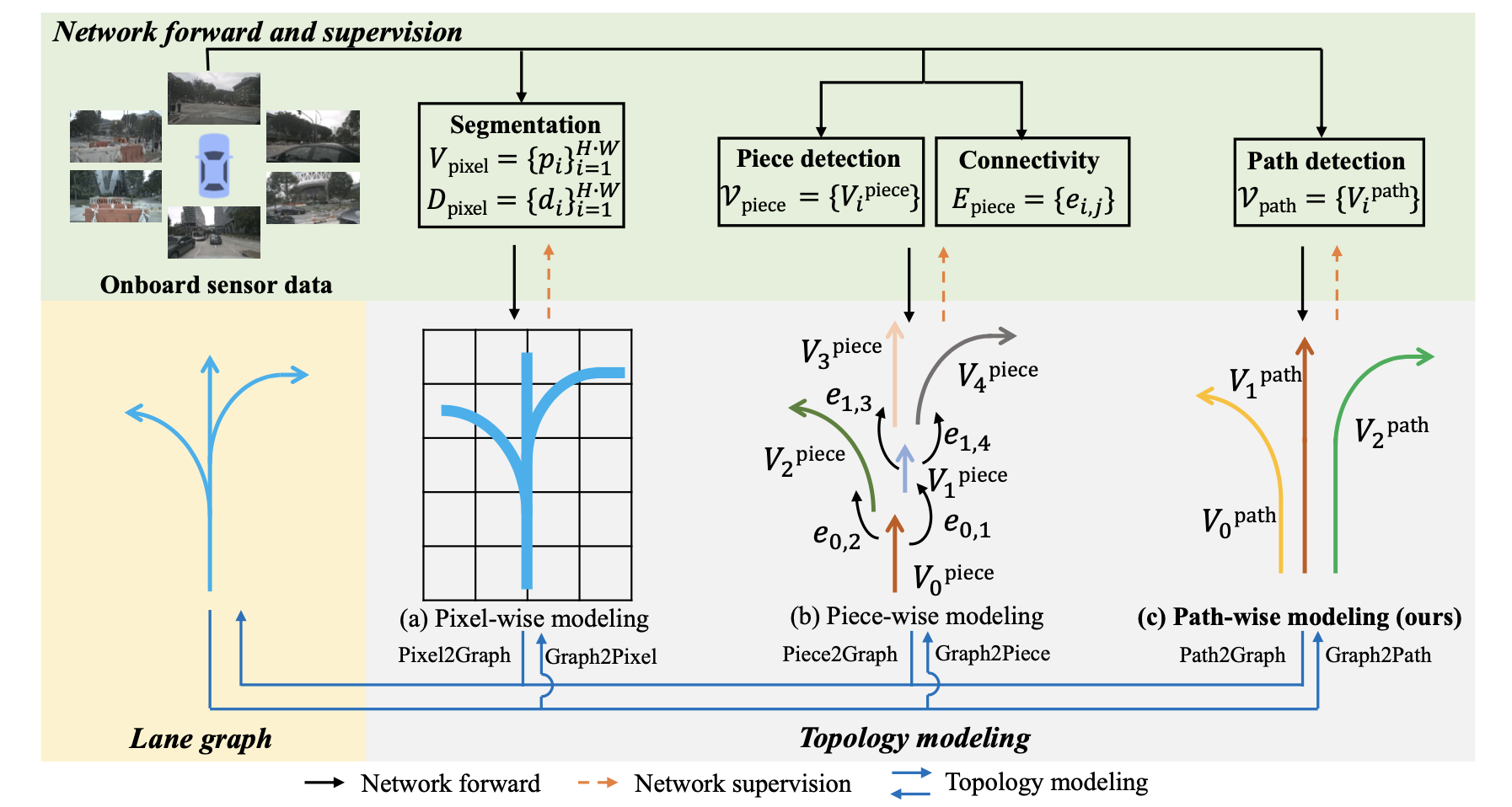
- 1)pixel-wise:使用像素预测的方式构建lane的结构信息,这类方法以HDMapNet为代表
- 2)piece-wise:使用小段预测和方向连接的形式构建lane结构信息,这类方法以STSU为代表
- 3)path-wise:使用一条完整path作为基础预测单位,从而构建完整道路graph,这便是这篇文章提出的方案
将pixel-wise、piece-wise和当前文章方法的效果进行对比,见下图所示:

在上图中可以看到pixel-wise和piece-wise的方法在一些边缘部分会出现预测错误的问题,但是文章的方法却能很好描述这些区域中的元素,其整体预测能力更为鲁棒。
2. 方法设计
2.1 整体pipeline
文章的整体结构见下图:
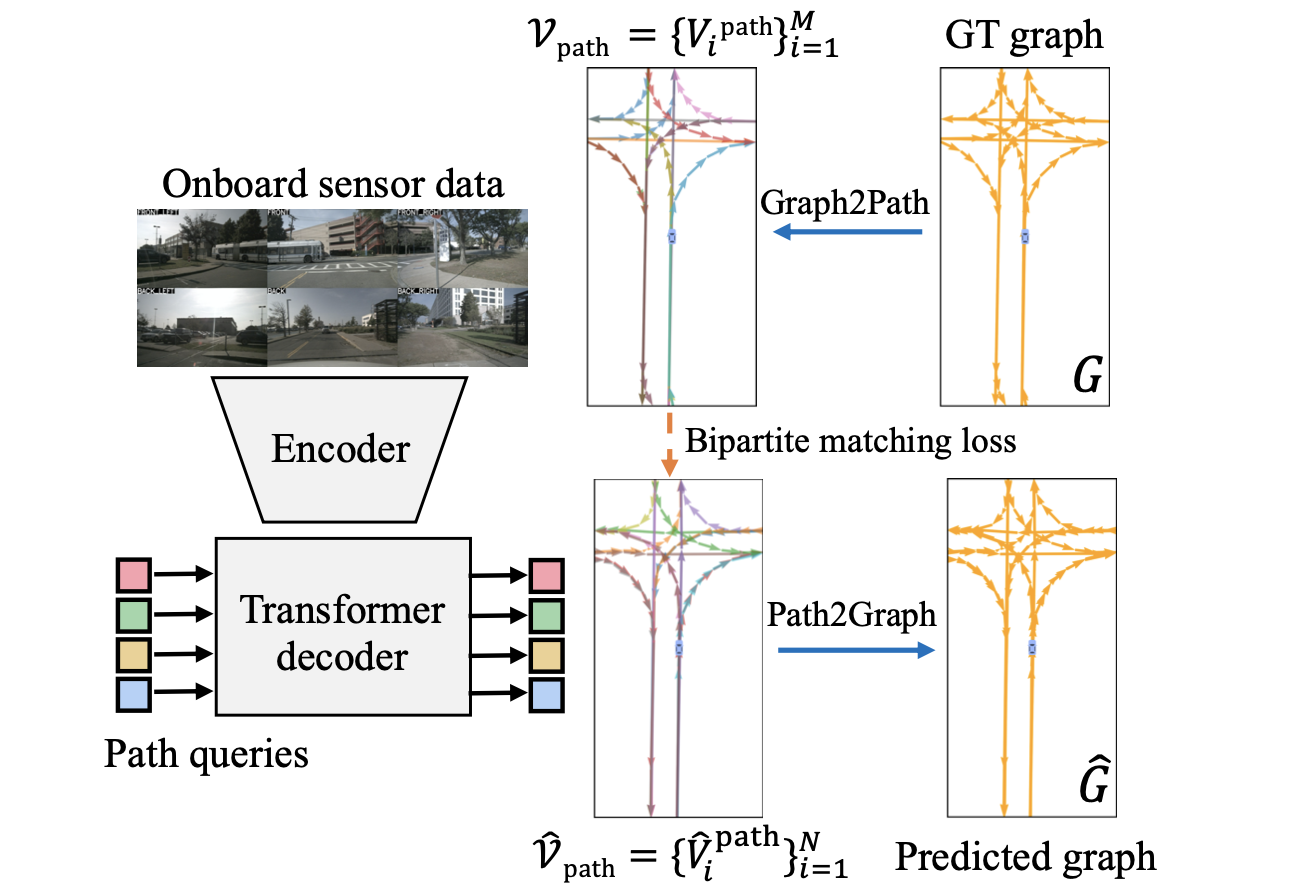
- 1)ResNet+GKT完成camera特征抽取和BEV特征构建
- 2)将path的检测问题使用类似DETR形式建模方法,得到path的预测表达
- 3)使用Graph2Path和Path2Graph完成训练数据生成和感知结果输出
2.2 path标注生成
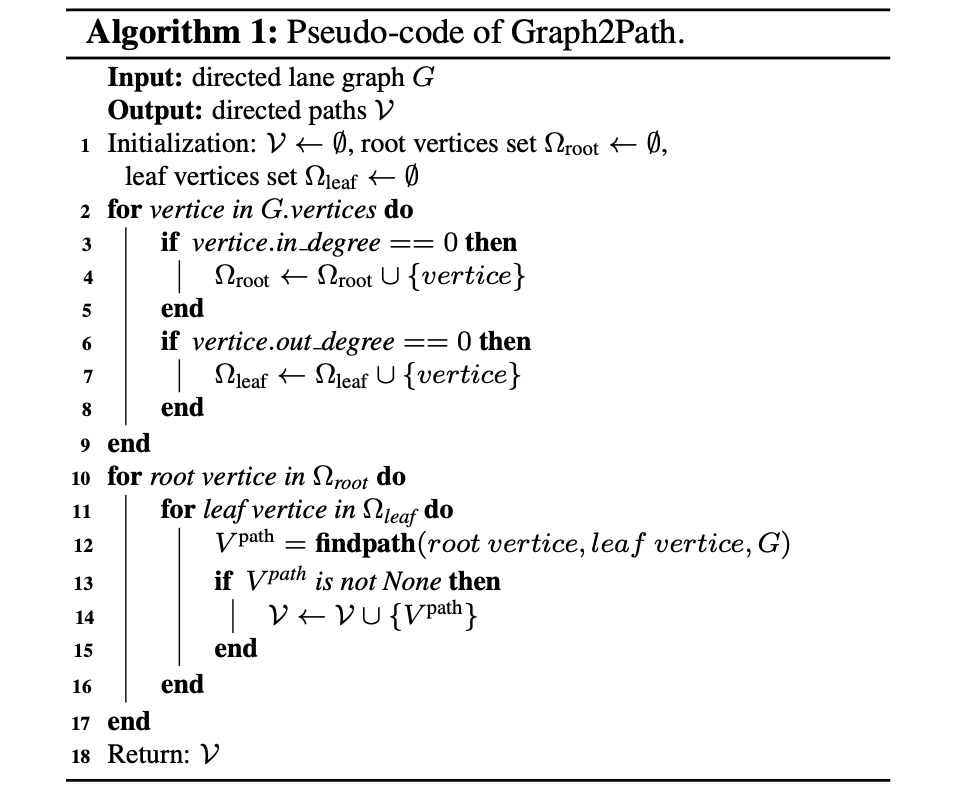
这部分完成训练标签的建立,也就是将一个lane通过起始节点和终止节点约束得到一个path的点集(这里的点集是有顺序的),一个graph便可以通过多个path的形式进行描述 V = { V i p a t h } i = 1 M \mathcal{V}=\{\mathcal{V}_i^{path}\}_{i=1}^M V={
Vipath}i=1M。完成的训练GT生成逻辑伪代码见下图:
2.3 path学习
对于这些点集的描述方式可以为polygon或贝塞尔曲线的形式。
polygon描述:
polygon描述是将path使用一个有序的点集进行描述: V p o l y p a t h = { p j ∈ R 2 ∣ j = 0 , 1 , … , N p − 1 } \mathcal{V}_{poly}^{path}=\{p_j\in R^2|j=0,1,\dots,N_{p}-1\} Vpolypath={
pj∈R2∣j=0,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1235
1235











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









