







NoMachine是一款功能强大的远程桌面软件,特别适合ROS开发者进行远程调试和协作开发。在ROS开发过程中,NoMachine能够提供流畅的远程桌面体验,使开发者能够从任何地点访问运行ROS的计算机,进行代码编写、系统调试和可视化工具操作。
NoMachine简介
NoMachine(NX技术)是一款高性能的远程桌面解决方案,相比传统的VNC或RDP协议,它提供了更低的延迟和更高的帧率,特别适合图形密集型应用如ROS的RViz、Gazebo等工具的使用。
主要特点:
- 低延迟:即使在低带宽条件下也能提供流畅体验
- 高压缩率:优化了图像传输效率
- 跨平台:支持Windows、Linux、macOS间的互连
- 安全性:采用SSH加密传输
- 多协议支持:包括NX、SSH、RDP等
在ROS开发中的应用场景
1. 远程访问机器人计算机
当机器人在实际环境中运行时,开发者通常需要通过远程方式访问机器人上的ROS环境进行调试。NoMachine可以提供:
- 实时查看机器人传感器数据
- 远程启动/停止ROS节点
- 调整参数和配置
- 使用RViz进行可视化监控
2. 团队协作开发
在多开发者环境中,NoMachine允许多个开发者同时访问同一台开发机:
- 共享ROS工作空间
- 协同调试复杂系统
- 实时演示和教学
3. 高性能图形应用支持
对于需要大量图形计算的ROS工具:
- Gazebo仿真环境远程操作
- RViz三维可视化
- rqt工具集的使用
NoMachine安装与配置
安装步骤
在Ubuntu/Linux(ROS主计算机)上:
wget https://download.nomachine.com/download/8.9/Linux/nomachine_8.9.1_1_amd64.deb
sudo dpkg -i nomachine_8.9.1_1_amd64.deb
在客户端计算机上:
从NoMachine官网下载对应平台的客户端软件安装包进行安装。
基本配置
-
网络配置:
- 确保主计算机有固定IP或配置DDNS
- 开放默认端口4000(可在配置中修改)
-
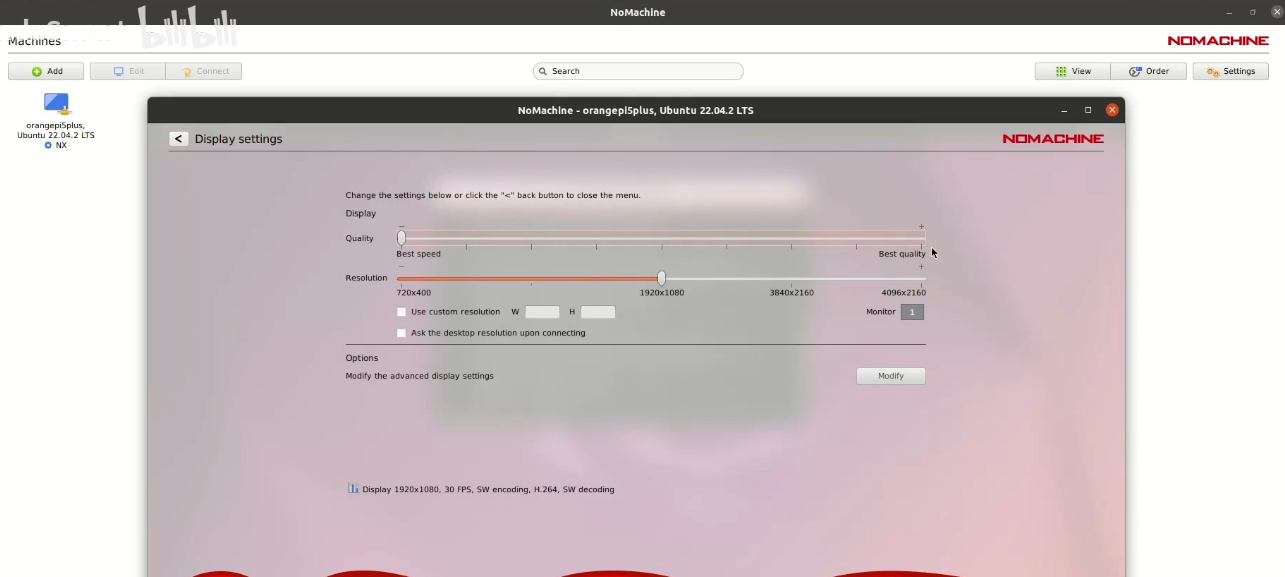
性能优化:
- 在NoMachine设置中选择"多媒体"配置文件以获得最佳图形性能
- 调整图像质量平衡带宽和视觉效果
-
安全设置:
- 启用双因素认证
- 限制登录尝试次数
- 使用SSH密钥认证
NoMachine与ROS工具集成
1. 启动ROS环境
通过NoMachine连接到远程计算机后,可以像本地一样操作:
# 启动ROS核心
roscore
# 在新终端中启动节点
rosrun package_name node_name
2. 使用RViz远程可视化
NoMachine能够流畅传输RViz的3D可视化数据:
- 启动RViz:
rosrun rviz rviz - 配置显示参数
- 实时查看传感器数据流
3. Gazebo仿真远程控制
对于资源密集的Gazebo仿真:
- 在服务器端运行Gazebo
- 通过NoMachine客户端操作仿真环境
- 实时调整仿真参数
4. rqt工具使用
NoMachine支持rqt工具集的远程使用:
- rqt_graph查看节点连接
- rqt_plot绘制数据曲线
- rqt_console查看日志
性能优化技巧
-
带宽管理:
- 降低颜色深度(16位色)
- 启用自适应图像质量
- 禁用桌面特效
-
ROS特定优化:
- 降低RViz和Gazebo的渲染质量
- 使用
--disable-shadows等Gazebo启动参数 - 关闭不必要的可视化插件
-
网络优化:
- 使用有线网络连接
- 配置QoS保证带宽
- 考虑局域网内使用
替代方案比较
| 工具 | 协议 | 性能 | 安全性 | ROS适用性 |
|---|---|---|---|---|
| NoMachine | NX | 高 | 高 | 优秀 |
| VNC | RFB | 中 | 中 | 一般 |
| RDP | RDP | 中 | 高 | 一般 |
| X11转发 | SSH | 低 | 高 | 基础使用 |
| TeamViewer | 私有 | 中 | 高 | 一般 |
实际应用案例
案例1:远程机器人调试
开发团队在办公室通过NoMachine连接到现场测试的机器人:
- 实时查看机器人摄像头画面
- 调整导航算法参数
- 监控系统资源使用情况
- 收集调试日志
案例2:分布式团队协作
跨国团队共同开发ROS项目:
- 共享开发环境配置
- 同步进行代码测试
- 实时演示新功能
- 共同调试复杂问题
常见问题解决
-
连接延迟高:
- 检查网络带宽
- 降低图像质量设置
- 关闭不必要的图形效果
-
音频问题:
- 确保音频转发已启用
- 检查服务器音频配置
- 更新音频驱动程序
-
权限问题:
- 确保用户有足够权限
- 检查NoMachine服务配置
- 验证防火墙设置
-
ROS工具显示异常:
- 检查DISPLAY环境变量
- 验证OpenGL支持
- 更新图形驱动程序
安全最佳实践
-
访问控制:
- 使用强密码策略
- 启用双因素认证
- 限制IP访问范围
-
数据安全:
- 启用会话加密
- 定期更新软件
- 禁用剪贴板共享(敏感场景)
-
审计日志:
- 启用连接日志记录
- 定期审查访问记录
- 设置异常登录警报
总结
参考视频教程:https://www.bilibili.com/video/BV1Zw4m1Y7aJ?spm_id_from=333.788.player.switch&vd_source=d87e3a479f73e137810e2d45ffc1ec5d
NoMachine是ROS开发中强大的远程调试工具,特别适合需要高性能图形传输的场景。通过合理配置,开发者可以获得接近本地的操作体验,大大提高分布式团队协作效率和远程调试便利性。结合ROS强大的工具生态,NoMachine能够显著提升机器人开发的工作流程。


















 3614
3614

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











