









随着无人机在测绘、巡检、农业喷洒等领域的广泛应用,对飞行的稳定性和定位精度提出了更高要求。SU17 无人机通过集成多种定位方式,可针对不同场景切换定位方式,以满足复杂环境下的高精度需求。
SU17集成了哪些定位方式?
SU17无人机现已集成视觉定位(室内环境)、GPS导航(户外定位)、光流传感(低空稳定)及雷达感知(环境建模)四大定位模块。为进一步提升复杂场景下的作业精度,新增RTK高精度定位系统,通过基站实时差分校正,实现全地形厘米级航线跟踪能力,适配测绘、巡检等高精度工业级任务需求。

不同定位方式对比

SU17-RTK定位实现原理
基站端: 地面RTK基站实时采集卫星原始观测数据,计算位置误差(电离层延迟、钟差等),生成差分纠偏数据;
数据传输: 纠偏数据通过低延迟LQ链路转发至无人机机载端,确保通信稳定性与抗干扰能力;
机载转发: 机载端作为中继节点,将纠偏数据无缝转发至无人机RTK移动端;
实时解算: RTK移动端融合自身卫星信号与纠偏数据,通过载波相位差分技术解算,输出厘米级定位结果(水平精度1-3cm);
飞行控制: 飞控系统基于RTK定位信息动态修正航迹,显著抑制GPS漂移,提升复杂环境(建筑群、高压线)下的航线跟踪稳定性。该方案通过;
LQ链路 低延时中转,兼顾远距离通信可靠性与定位实时性,适用于测绘巡检、精准农业等需毫米级定位的场景。
SU17-RTK定位飞行实测
我们在室外无风宽阔环境测试,使用su17无人机RTK定位下进行悬停测试与返航测试,并分析无人机本地位置变化范围。
悬停测试
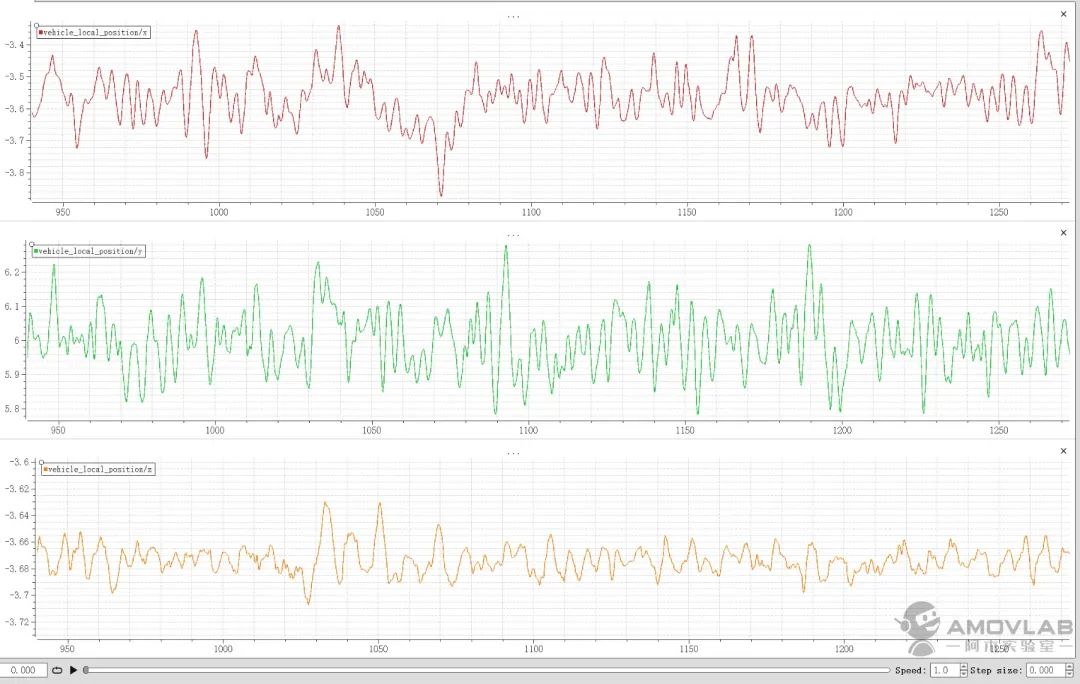
在rtk定位下,解锁无人机并飞行到3.7m高度进行悬停,截取一段悬停日志进行分析,如下图:我们观察无人机本地位置(vehicle_local_position/x,y,z,)观察到x/y/z轴波动范围分别为±0.15m/±0.15m/±0.03m。
返航测试
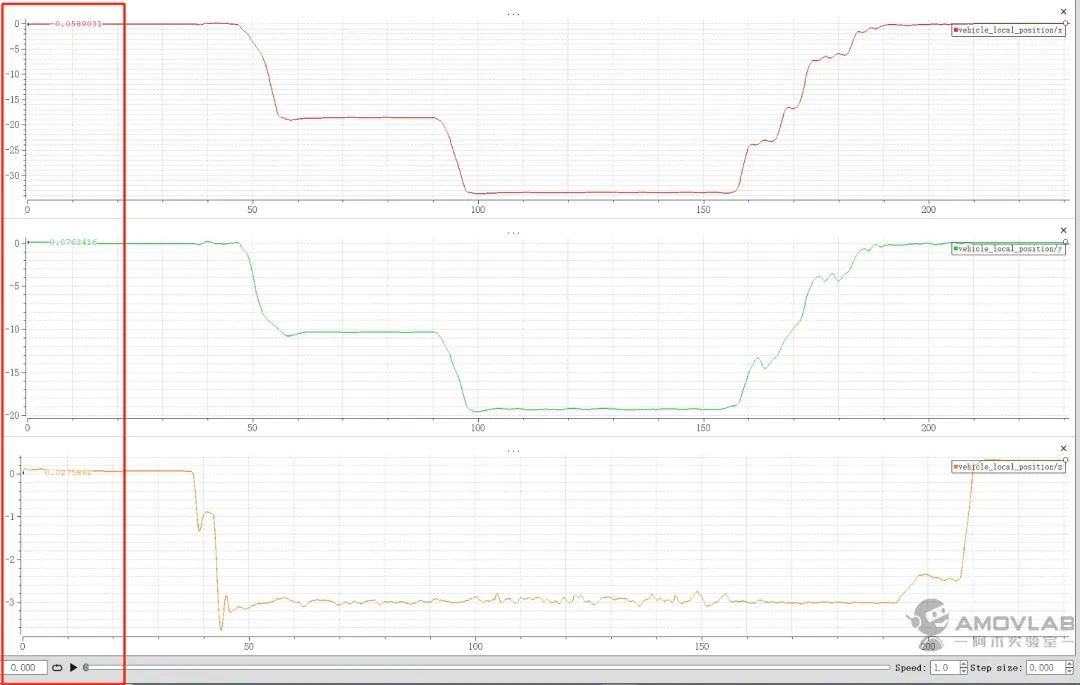
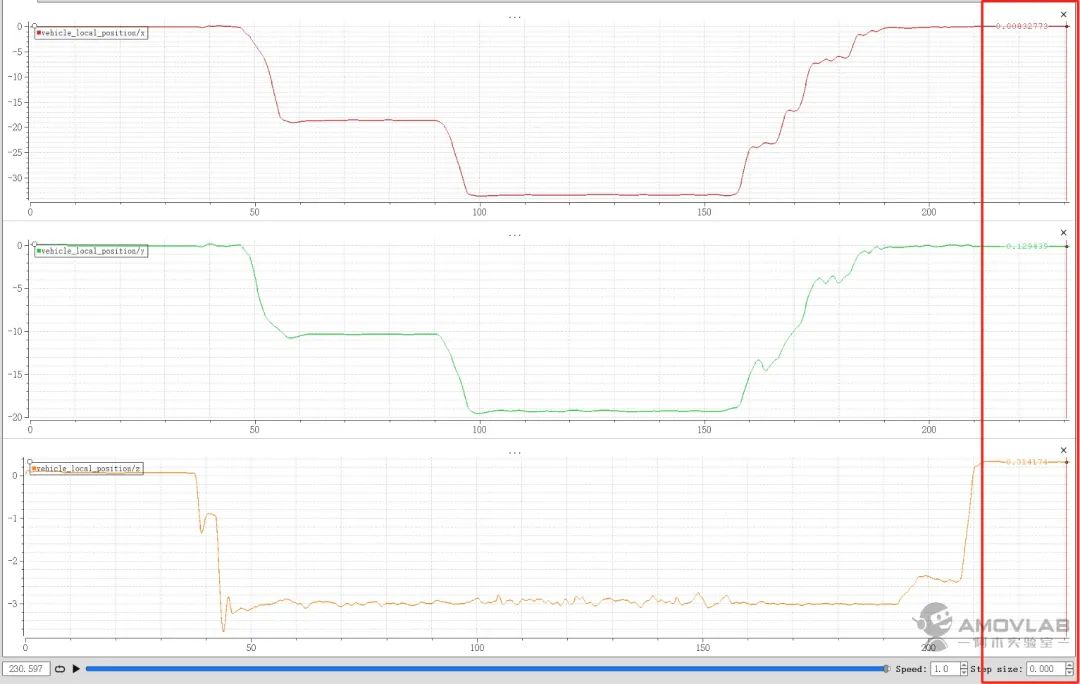
无人机进行返航测试后,分析无人机起始位置与返航降落点的位置,如下图:我们观察到起始位置x/y/z数据分别是:0.05/0.07/0.02;返航降落后的位置x/y/z数据分别是:0.008/0.12/0.31;其中x轴变化大小:0.042m;y轴变化大小:0.005m;z轴变化 0.29m 。
结论
SU17无人机在RTK定位下悬停水平精度达±0.15m,高度稳定性±0.03m;返航水平偏差**<0.05m**,显著减少定位漂移,确保无人机在测绘、巡检等高精度任务中稳定执行航线。
联系我们,获取该产品更多信息
如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:bbs.amovlab.com
有工程师亲自解答10000+无人机开发者和你共同进步!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









