




 本文分享了使用SolidWorks导出URDF模型的经验,重点介绍了安装sw2urdf插件的过程,模型分解与坐标系设置的方法,以及导出STL文件的注意事项。
本文分享了使用SolidWorks导出URDF模型的经验,重点介绍了安装sw2urdf插件的过程,模型分解与坐标系设置的方法,以及导出STL文件的注意事项。
最近在项目中用到了SolidWorks来导URDF模型,所以在这里做一下总结。
这里以Hand的模型为例:
首先就是需要你先给SolidWorks安装sw2urdf插件。
根据结构我将它分为7个部分6个自由度,拇指两个,食指两个,最后三个手指为一个整体也是两个。
接下来就是给每个部分添加坐标系和轴,这里有一些需要注意的地方,
(1)关于坐标系建立我们需要先建一个面,在这个面中心建一个点,然后在这个点上建坐标系,坐标系的方向需要统一,例如x轴为转向轴z轴指向下一个装配体。
(2)在建轴的时候我们最好在上一个装配体上建下一个装配体的joint。
(3)我们可能需要右键From New Subassembly合并装配体,也可能需要Insert Components组装装配体用Mate配对。
(4)在另存为stl的时候需要选择Options勾选保存为单一文件和不改变方向,选择我们自建的坐标系。


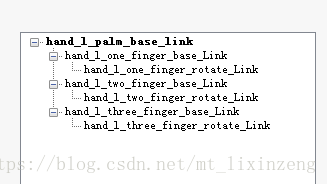
最后就是通过插件建立各个模块坐标系和轴的关系:
我这些只是SolidWorks使用中的一些点,如果想知道导出urdf流程可以去百度或者去ros官网查看。
如有疑问请留言!

















 1万+
1万+














 到【灌水乐园】发言
到【灌水乐园】发言







