







突然发现自己被旋转矩阵的左乘右乘给搞糊涂了,查了不少博客还是有点晕,这里自己总结一下:
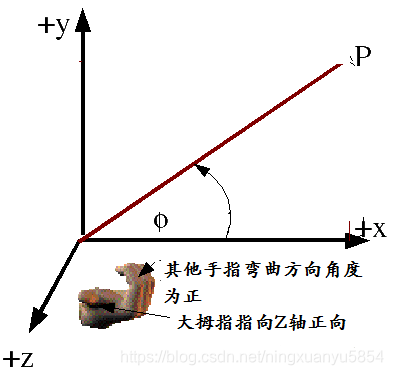
本文所讨论均是基于右手坐标系,旋转也是以正方向旋转,如图所示:
左乘: 坐标系不动,点动,则左乘。【若绕静坐标系(世界坐标系)旋转,则左乘,也是变换矩阵乘坐标矩阵;】
右乘: 点不动,坐标系动,则右乘。【若是绕动坐标系旋转(自身建立一个坐标系),则右乘,也就是坐标矩阵乘变换矩阵】
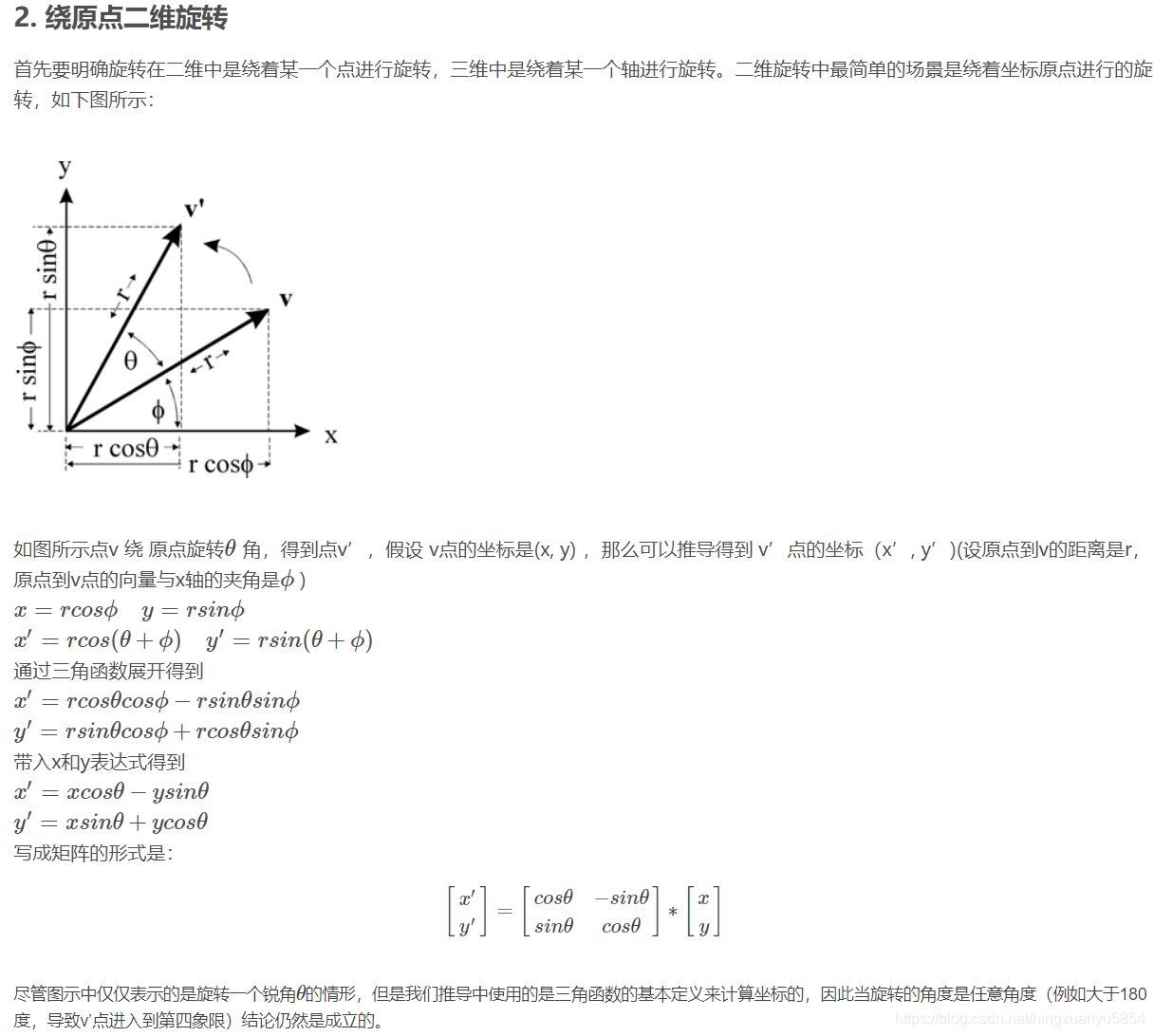
由于三维旋转可以分解成分别绕三个轴旋转,然后其实就是二维旋转了。为了方便,这里就使用二维旋转举例。
比如绕z轴旋转 theta 角度;
左乘分析如图所示:
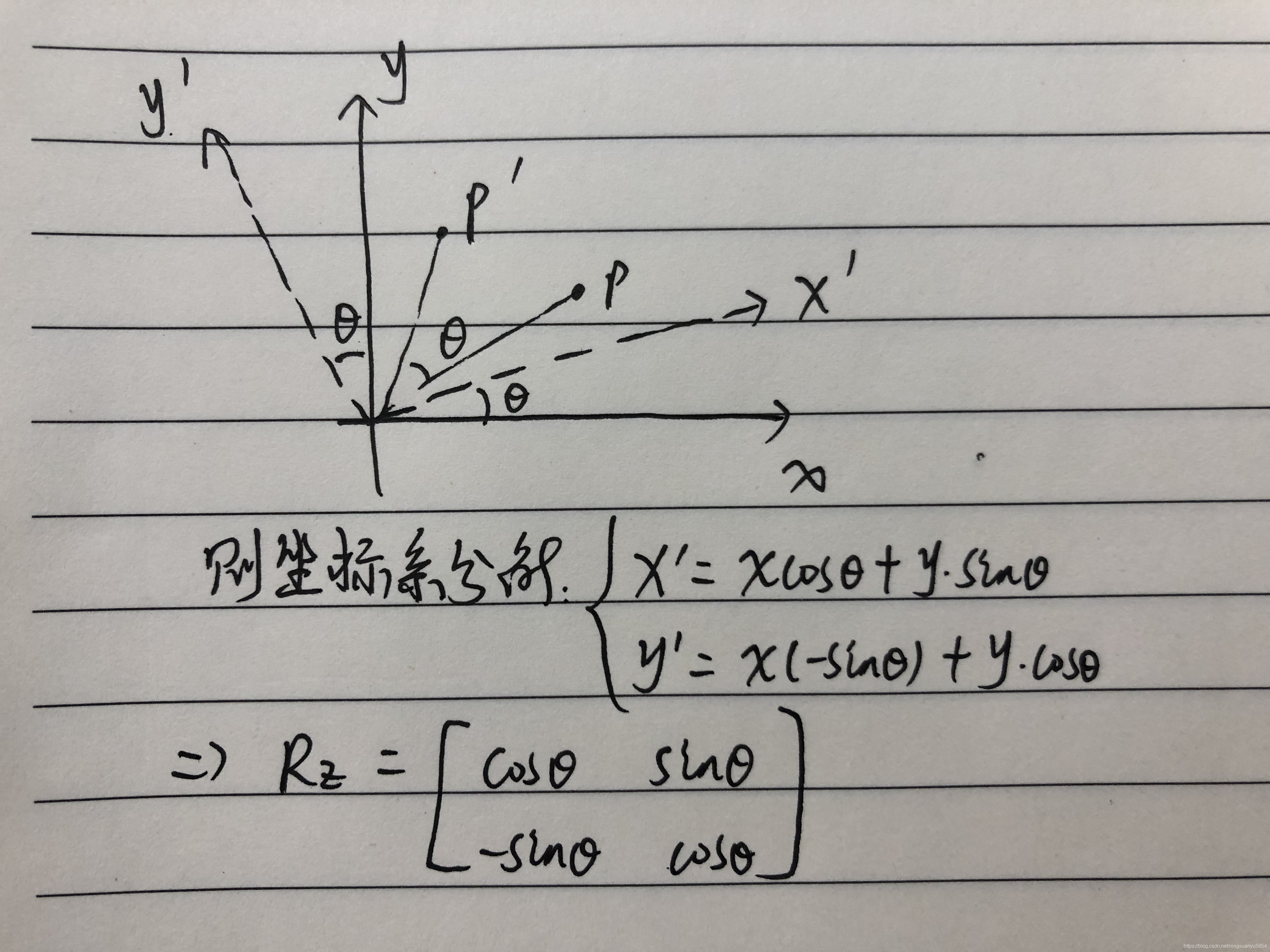
而右乘分析:
则是旋转坐标系;点逆时针旋转了theta角,其实也就是相当于坐标轴也逆时针旋转theta角。如图所示:
设点原坐标为
[
x
,
y
,
z
]
[x,y,z]
[x,y,z],旋转后的坐标为
[
x
′
,
y
′
,
z
′
]
[x',y',z']
[x′,y′,z′], 设左乘旋转矩阵为
R
l
e
f
t
R_{left}
Rleft,右乘旋转矩阵为
R
r
i
g
h
t
R_{right}
Rright,
则:
[
x
′
y
′
z
′
]
=
R
l
e
f
t
∗
[
x
y
z
]
\begin{bmatrix}x'\\y'\\z'\end{bmatrix}={R_{left}}*\begin{bmatrix}x\\y\\z\end{bmatrix}
⎣⎡x′y′z′⎦⎤=Rleft∗⎣⎡xyz⎦⎤
[
x
′
y
′
z
′
]
=
[
x
y
z
]
∗
R
r
i
g
h
t
\begin{bmatrix}x'&y'&z'\end{bmatrix}=\begin{bmatrix}x&y&z\end{bmatrix}*{R_{right}}
[x′y′z′]=[xyz]∗Rright
观察上面两图计算出来的旋转矩阵还可以得出结论,
R
l
e
f
t
∗
R
r
i
g
h
t
=
I
R_{left}*{R_{right}} = I
Rleft∗Rright=I,这意味这这两个矩阵是互为逆。
另外,
R
l
e
f
t
(
θ
)
=
R
r
i
g
h
t
(
−
θ
)
R_{left}(\theta) = {R_{right}} (-\theta)
Rleft(θ)=Rright(−θ) 。
【可以说,如果一个旋转矩阵左乘表示逆时针旋转 theta 角,那么将此矩阵右乘的话则表示顺时针旋转 theta 角】
左乘与右乘是可以变换的。也即是说:
R l e f t 3 ( θ ) ∗ R l e f t 2 ( θ ) ∗ R l e f t 1 ( θ ) ∗ [ x y z ] = R r i g h t 3 ( − θ ) ∗ R r i g h t 2 ( − θ ) ∗ R r i g h t 1 ( − θ ) ∗ [ x y z ] {R_{left_3}}(\theta)*{R_{left_2}}(\theta)*{R_{left_1}}(\theta)*\begin{bmatrix}x\\y\\z\end{bmatrix} = {R_{right_3}}(-\theta)*{R_{right_2}}(-\theta)*{R_{right_1}}(-\theta)*\begin{bmatrix}x\\y\\z\end{bmatrix} Rleft3(θ)∗Rleft2(θ)∗Rleft1(θ)∗⎣⎡xyz⎦⎤=Rright3(−θ)∗Rright2(−θ)∗Rright1(−θ)∗⎣⎡xyz⎦⎤
不过建议只是用一种方法来计算旋转矩阵,以免混淆。
【如有错误,欢迎各位批评指正。】
参考博客:https://blog.csdn.net/csxiaoshui/article/details/65446125

















 6710
6710

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









