







这篇文章是睿慕课学院的课程《伺服驱动器原理及设计开发实践与控制性能优化》的学习笔记,感兴趣的同学们可以去睿慕课学习哈
→→→睿慕课学院
因为毕竟是有版权,这里我尽量少搬视频里的内容,尽量来记录我自己的思考和理解。
❤ 2022.2.14 ❤
第1章 伺服系统基础及其硬件组成
机器人用伺服驱动器
○ 什么是伺服
伺服就是servo
○ 伺服系统
伺服系统又称随动系统,主要靠反馈控制。
○ 伺服系统的基础——负反馈
○ 伺服驱动器数学模型

○ 伺服驱动开发者需要的数学知识
复变函数、微积分、时域和频域的知识
机器人伺服系统的组成部分
○ 核心部件
电机、伺服驱动器、编码器
伺服电机
○ 分类

○ 永磁同步电机

○ 电机选型
1、明确运动条件要求,即加减速时间、运动速度、机构的重量、机构的运动方式等。
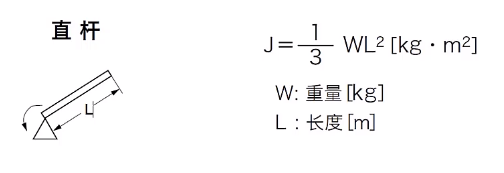
2、依据运行条件要求选用合适的负载惯量计算公式,计算出机构的负载惯量。
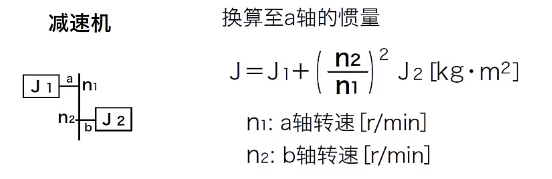
3、依据负载惯量与电机惯量选出适当的电机规格。折算到伺服电机上面的惯量,不应超过本身的10倍。
○ 电机轴相关标准

伺服电机编码器
○ 旋转变压器
○ 光电编码器
关节机器人一般使用多圈绝对值编码器
单圈绝对编码方式:格雷码、M序列编码、游标码
多圈位置实现方式:机械多圈、电池备份、韦根线圈














 519
519











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









