






一.安装步骤
安装步骤,算法原理都来自于官方,在这里不多做介绍。GitHub - Livox-SDK/LIO-Livox: A Robust LiDAR-Inertial Odometry for Livox LiDAR
参考文章
https://blog.csdn.net/hummter/article/details/130277212?spm=1001.2014.3001.5502
二.接参考文章的第三步
cd catkin_ws
source devel/setup.bash
roslaunch livox_ros_driverlivox_lidar_rviz.launch
运行这个launch文件,不需要另外开rviz,因为本身自带了,运行就可以看见图像了。
后面重点说一下如何运行数据包
三.运行已经录好的数据包
首先数据包最好是记录所有发布的话题,用指令
rosbag record -a
然后就是看一下话题的详细信息
rosbag info XXXXXXX
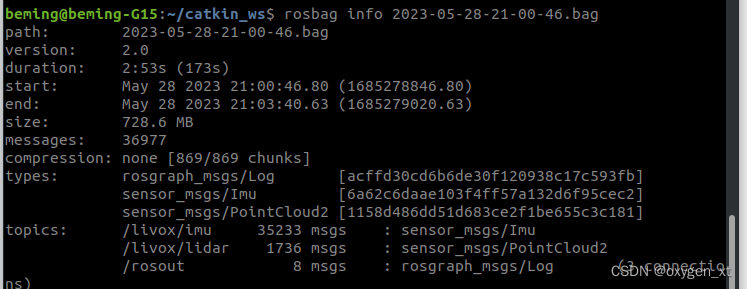
XXXX表示数据包的名称
这样可以知道bag的topic,然后在rviz 中修改topic ,Fixed_frame

分别改为/livox/lidar,livox_frame
最后运行数据包就可以
rosbag play XXXXXXXX
最后就成功了
非常的清晰
















 798
798











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









