






笔者近来开始接触四旋翼无人机,学习过程中写了一份有关无人机动力学与控制的python代码,在此做一些记录和原理解释。
附上仓库地址:四旋翼无人机仿真建模: 本仓库实现了四旋翼无人机的动力学仿真建模,并在此基础上完成了控制器的设计,包括串级PID、LQR、MPC等,实现了位置跟踪和路径规划。
总体框架与思路如图所示,四旋翼无人机的运动模型可以简单的看作是十二个状态变量(位置、速度、角度、角速度各三个变量)随运动而发生改变的过程,运动学方程如下图右半部分所示。
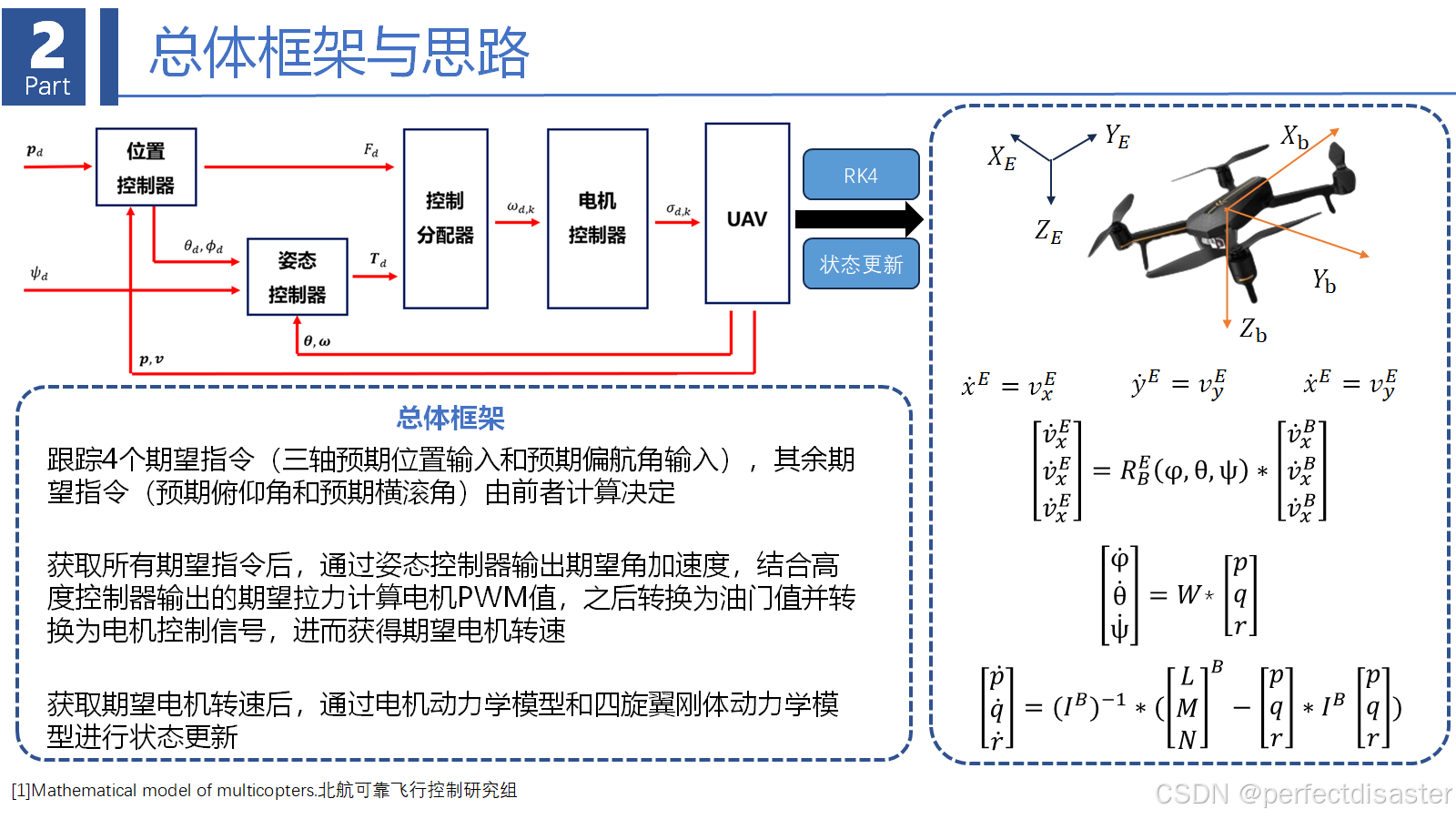
从框架讲起,作为一名飞行器控制专业的学生,四旋翼无人机在我眼中并不算是严格意义上的飞行器,我对其的理解更偏向于robotic,与固定翼相比,四旋翼的动力学模型更简单,我浅显的理解为依靠四个轴上的电机带动螺旋桨提供升力,通过调节电机转速制造升力差引起角度的偏转进而带动无人机运动,因此就引出了四旋翼无人机常见的分级控制策略,分为角速度、姿态、速度和位置由内到外的四个环,详细内容将在下一篇文章展开。
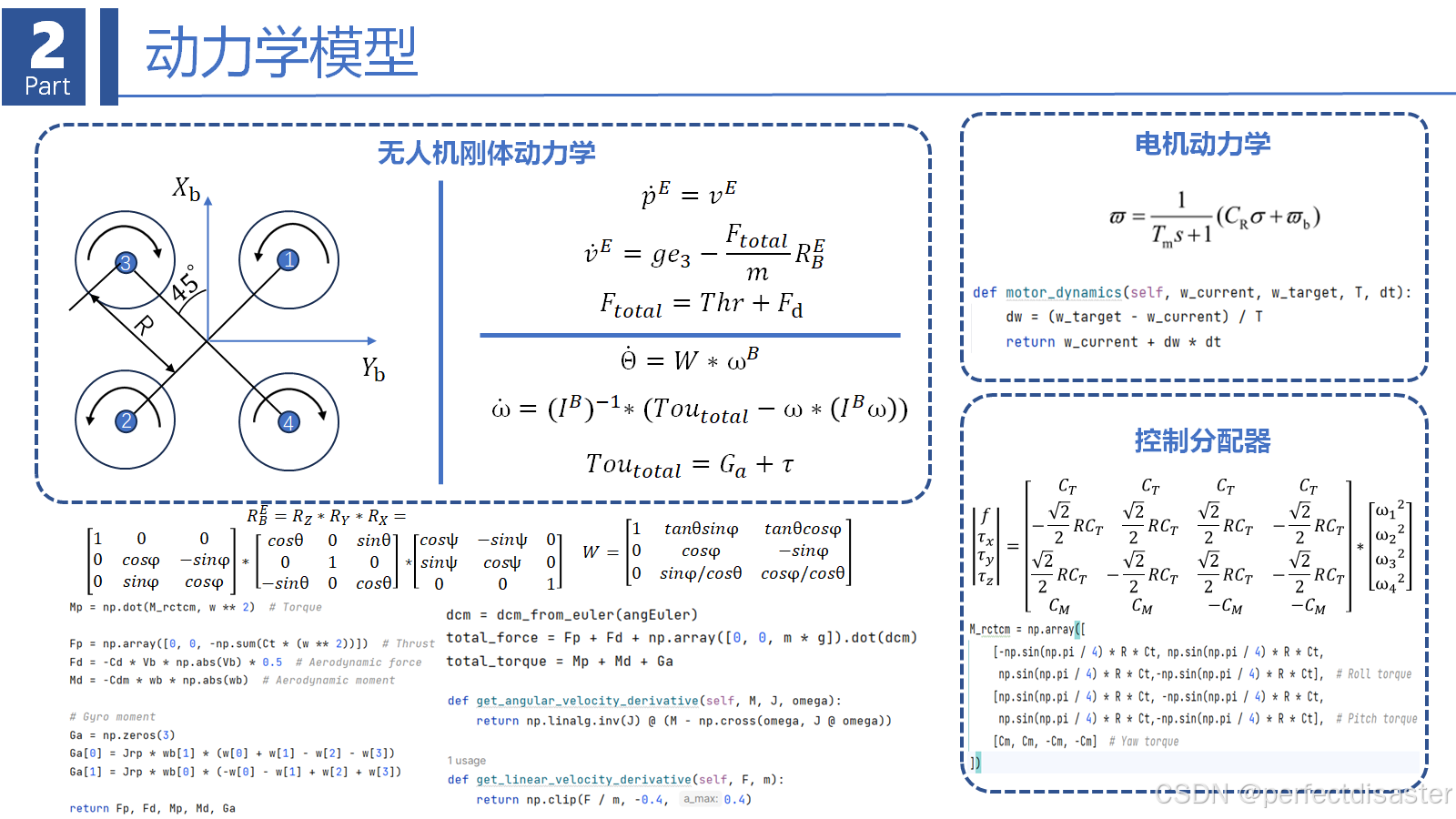
笔者构建的动力学模型分为上图的几个部分,无人机构型为x型,定义电机顺序如上图左上所示,电机作为执行器,近似看作一个一阶延迟环节,控制分配器由升力和力矩在四轴上的分解和合成计算得出。
选取四阶龙格库塔法进行状态更新,由此可以开始编写程序了:
common_function:
# Author:gyx
# Usage: common function
# Last change: 2024-7-20
import numpy as np
def dcm_from_euler(euler_angles):
"""
计算方向余弦矩阵(DCM)(Earth2Body)
:param roll: 滚转角,单位为弧度
:param pitch: 俯仰角,单位为弧度
:param yaw: 偏航角,单位为弧度
:return: 方向余弦矩阵(DCM)
"""
roll, pitch, yaw = euler_angles
c_roll = np.cos(roll)
s_roll = np.sin(roll)
c_pitch = np.cos(pitch)
s_pitch = np.sin(pitch)
c_yaw = np.cos(yaw)
s_yaw = np.sin(yaw)
# 构建方向余弦矩阵
dcm = np.array([
[c_yaw * c_pitch, c_yaw * s_pitch * s_roll - s_yaw * c_roll, c_yaw * s_pitch * c_roll + s_yaw * s_roll],
[s_yaw * c_pitch, s_yaw * s_pitch * s_roll + c_yaw * c_roll, s_yaw * s_pitch * c_roll - c_yaw * s_roll],
[-s_pitch, c_pitch * s_roll, c_pitch * c_roll]
])
return dcm
def rotation_matrix(euler_angles): # (Body2Earth)
phi, theta, psi = euler_angles
R_x = np.array([[1, 0, 0],
[0, np.cos(phi), -np.sin(phi)],
[0, np.sin(phi), np.cos(phi)]])
R_y = np.array([[np.cos(theta), 0, np.sin(theta)],
[0, 1, 0],
[-np.sin(theta), 0, np.cos(theta)]])
R_z = np.array([[np.cos(psi), -np.sin(psi), 0],
[np.sin(psi), np.cos(psi), 0],
[0, 0, 1]])
return R_z @ R_y @ R_x
def angle_body2world(euler_angles):
phi, theta, psi = euler_angles
Trans_matrix = np.array([[1, np.tan(theta) * np.sin(phi), np.tan(theta) * np.cos(phi)],
[0, np.cos(phi), -np.sin(phi)],
[0, np.sin(phi) / np.cos(theta), np.cos(phi) / np.cos(theta)]])
return Trans_matrix
def rk4_step(f, state, u, t, dt):
k1 = f(state, u, t)
print([x * 0.5 * dt for x in k1])
k2 = f(state + [x * 0.5 * dt for x in k1], u, t + 0.5 * dt)
k3 = f(state + [x * 0.5 * dt for x in k2], u, t + 0.5 * dt)
k4 = f(state + [x * dt for x in k3], u, t + dt)
return state + (dt / 6) * (k1 + 2 * k2 + 2 * k3 + k4)
dynamic:
# Author:gyx
# Usage: build uav dynamics model
# Last change: 2024-7-20
import numpy as np
from common_function import dcm_from_euler, rotation_matrix
class UAVDynamics:
def __init__(self, params):
self.params = params
self.w_current = params.ModelInit_Rads
def get_angular_velocity_derivative(self, M, J, omega):
return np.linalg.inv(J) @ (M - np.cross(omega, J @ omega))
def get_linear_velocity_derivative(self, F, m):
return np.clip(F / m, -0.4, 0.4)
def Obtain_force_torque(self, w, R, Cm, Ct, Vb, Cd, wb, Cdm, Jrp):
M_rctcm = np.array([
[-np.sin(np.pi / 4) * R * Ct, np.sin(np.pi / 4) * R * Ct, np.sin(np.pi / 4) * R * Ct,
-np.sin(np.pi / 4) * R * Ct], # Roll torque
[np.sin(np.pi / 4) * R * Ct, -np.sin(np.pi / 4) * R * Ct, np.sin(np.pi / 4) * R * Ct,
-np.sin(np.pi / 4) * R * Ct], # Pitch torque
[Cm, Cm, -Cm, -Cm] # Yaw torque
])
Mp = np.dot(M_rctcm, w ** 2) # Torque
Fp = np.array([0, 0, -np.sum(Ct * (w ** 2))]) # Thrust
Fd = -Cd * Vb * np.abs(Vb) * 0.5 # Aerodynamic force
Md = -Cdm * wb * np.abs(wb) # Aerodynamic moment
# Gyro moment
Ga = np.zeros(3)
Ga[0] = Jrp * wb[1] * (w[0] + w[1] - w[2] - w[3])
Ga[1] = Jrp * wb[0] * (-w[0] - w[1] + w[2] + w[3])
return Fp, Fd, Mp, Md, Ga
def motor_dynamics(self, w_current, w_target, T, dt):
dw = (w_target - w_current) / T
return w_current + dw * dt
def state_derivative(self, state, w_target,dt):
velB, angEuler, rateB = state
m = self.params.ModelParam_uavMass
J = self.params.ModelParam_uavJ
g = self.params.ModelParam_envGravityAcc
uavType = self.params.ModelParam_uavType
R = self.params.ModelParam_uavR
Cm = self.params.ModelParam_rotorCm
Ct = self.params.ModelParam_rotorCt
Cd = self.params.ModelParam_uavCd
Cdm = self.params.ModelParam_uavCCm
Jrp = self.params.ModelParam_motorJm
T = self.params.ModelParam_motorT
self.w_current = self.motor_dynamics(self.w_current, w_target, T, dt)
Fp, Fd, Mp, Md, Ga = self.Obtain_force_torque(self.w_current, R, Cm, Ct, velB, Cd, rateB, Cdm, Jrp)
dcm = dcm_from_euler(angEuler)
total_force = Fp + Fd + np.array([0, 0, m * g]).dot(dcm)
total_torque = Mp + Md + Ga
velB_dot = self.get_linear_velocity_derivative(total_force, m)
rateB_dot = self.get_angular_velocity_derivative(total_torque, J, rateB)
return velB_dot, rateB_dot
def update_dynamics(self, state, w_target, dt):
velB, angEuler, rateB = state
# Runge-Kutta 4th Order Method
k1_velB_dot, k1_rateB_dot = self.state_derivative(state, w_target,dt)
k2_velB_dot, k2_rateB_dot = self.state_derivative(
(velB + 0.5 * k1_velB_dot * dt, angEuler, rateB + 0.5 * k1_rateB_dot * dt), w_target,dt)
k3_velB_dot, k3_rateB_dot = self.state_derivative(
(velB + 0.5 * k2_velB_dot * dt, angEuler, rateB + 0.5 * k2_rateB_dot * dt), w_target,dt)
k4_velB_dot, k4_rateB_dot = self.state_derivative(
(velB + k3_velB_dot * dt, angEuler, rateB + k3_rateB_dot * dt), w_target,dt)
velB = velB + (k1_velB_dot + 2 * k2_velB_dot + 2 * k3_velB_dot + k4_velB_dot) * dt / 6
rateB = rateB + (k1_rateB_dot + 2 * k2_rateB_dot + 2 * k3_rateB_dot + k4_rateB_dot) * dt / 6
return velB, angEuler, rateB
Last,放上笔者的个人主页:郭昱鑫的个人主页

















 7764
7764

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









