




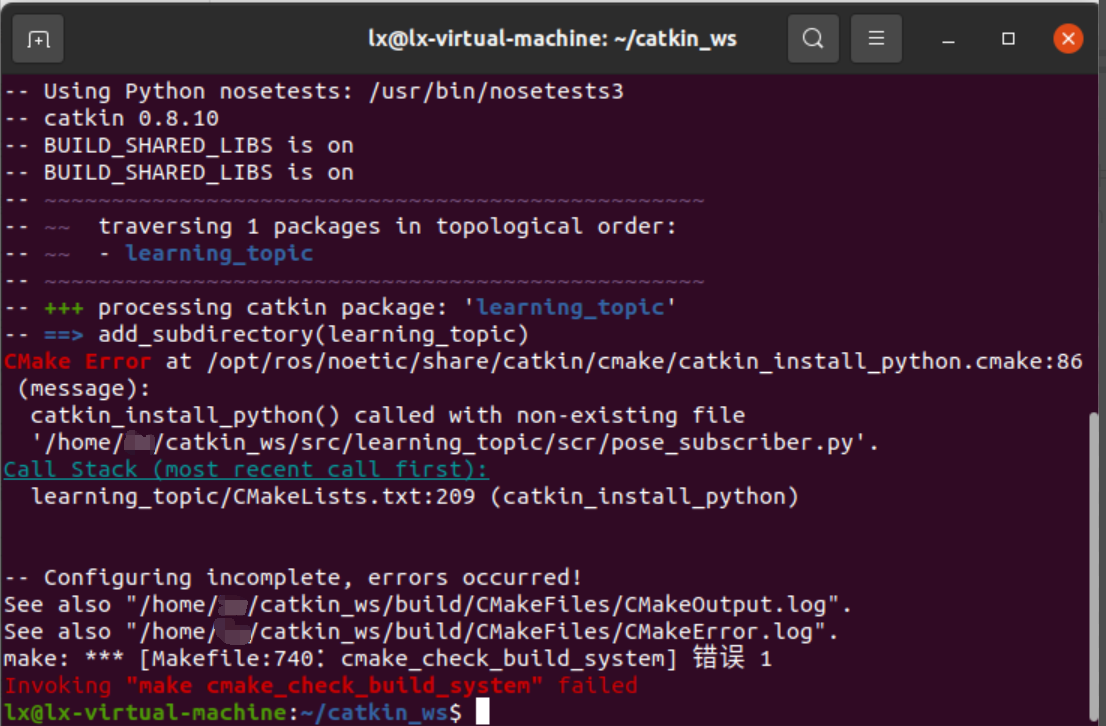
(1)不要将python文件放入scr目录中,否则后续编译工作空间会报如图所示的错误。首先要在功能包文件夹(catkin_ws/src/learnning_topic)中创建一个scripts(文件夹名可任意,但默认为scripts)目录来存放python脚本文件
(2)
方法一
①通过软链接将python链接到python3:
sudo ln -s /usr/bin/python3 /usr/bin/python #链接一次即可 文章介绍了在ROS工作空间中如何正确存放和管理Python脚本,包括不在src目录下存放脚本,创建scripts目录,以及通过软链接、声明解释器或修改CMakeLists.txt文件来指定Python3解释器。此外,还需给脚本赋予执行权限,并通过source命令使环境变量生效,最后运行roscore和相关功能包来执行Python脚本。
文章介绍了在ROS工作空间中如何正确存放和管理Python脚本,包括不在src目录下存放脚本,创建scripts目录,以及通过软链接、声明解释器或修改CMakeLists.txt文件来指定Python3解释器。此外,还需给脚本赋予执行权限,并通过source命令使环境变量生效,最后运行roscore和相关功能包来执行Python脚本。
(1)不要将python文件放入scr目录中,否则后续编译工作空间会报如图所示的错误。首先要在功能包文件夹(catkin_ws/src/learnning_topic)中创建一个scripts(文件夹名可任意,但默认为scripts)目录来存放python脚本文件
(2)
方法一
①通过软链接将python链接到python3:
sudo ln -s /usr/bin/python3 /usr/bin/python #链接一次即可 1459
9590
1459
9590

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























