







1:创建工作空间及功能包
2:在功能包相应文件夹编写普通代码文件
- 在工作空间/src/功能包/src 路径下编写好普通python文件,如下
- 为创建的python添加可执行权限,注意要在创建python文件的位置打开终端,输入如下命令
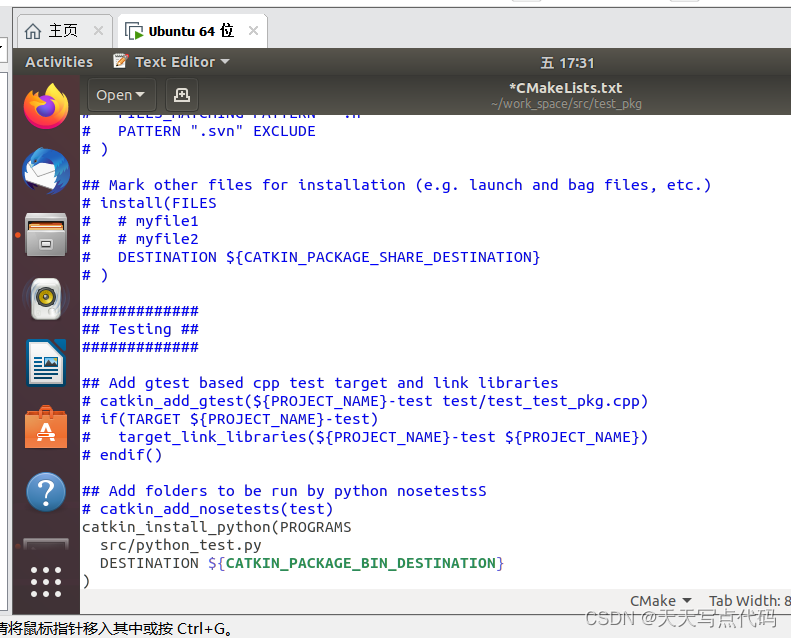
chmod +x *.py - 配置对应功能包中的cmakelist文件(注意是功能包,而不是工作空间),直接在文件末尾添加命令即可,如下图。(只需对应更改文件路径即可)
catkin_install_python(PROGRAMS
src/python_test.py #功能包下的代码文件所在路径 代码文件夹/代码文件名
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
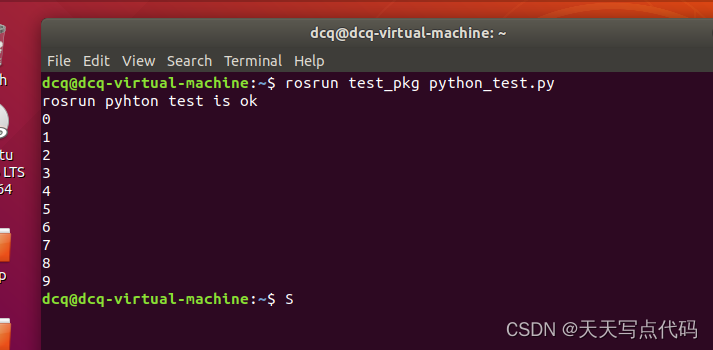
4. 打开一个终端,执行指令 rosrun 功能包名 代码文件名
rosrun 功能包名 代码文件名
如果在运行时遇到问题,如下:可以在对应的python代码文件首行里面添加#!/usr/bin/python
改行是为了申明这是个python脚本,要用python解释器来运行,参考
3:可能的问题
如果遇到问题 [rospack] Error: package ‘***’ not found
是因为没有配置导致的
有如下方法:
source /opt/ros/kinetic/setup.bash
即 source 工作空间名/devel/setup.bash
source /opt/ros/kinetic/setup.bash只在当前终端有作用,即具有单一时效性,要想每次新开一个终端都不用重新配置环境,就用echo语句将命令添加到bash会话中。
通过如下方法可以只设置一次(更改相应路径),参考
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
















 404
404











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











