







目录
Part2 根据用户自定义 增加一列 自定义颜色,我这里借用了 PointXYZI
Part1 根据不同深度显示不同颜色
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <boost/thread/thread.hpp>
#define FILE_PATH "aa.pcd"
//------------------------------------------------------------------//
// 全局函数声明 //
//------------------------------------------------------------------//
//void CreateCloudFromTxt(const std::string& file_path, pcl::PointCloud<pcl::PointXY>::Ptr cloud);
void visualization(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud);
//------------------------------------------------------------------//
// 主函数,程序入口 //
//------------------------------------------------------------------//
int main(int argc, char** argv) {
// -------------------加载点云----------------------
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZI>);
pcl::io::loadPCDFile(FILE_PATH, *cloud);
// -----------------可视化点云---------------------
visualization(cloud);
Sleep(100 * 1000);
return 0;
}
------------------------------------------------------------------//
子函数实现 //
------------------------------------------------------------------//
------------------数据可视化-------------------
void visualization(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud)
{
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("viewer"));
// 添加需要显示的点云数据
pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZ> single_color(cloud, "z");/// deep different color
//pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, "x");
//pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, "y");
viewer->addPointCloud<pcl::PointXYZ>(cloud, single_color, "example");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "example");
while (!viewer->wasStopped()) {
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
Part2 根据用户自定义 增加一列 自定义颜色,我这里借用了 PointXYZI
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <boost/thread/thread.hpp>
#define FILE_PATH "aa.pcd"
void CreateCloudIFromTxt(const std::string& file_path, pcl::PointCloud<pcl::PointXYZI>::Ptr cloud)
{
std::ifstream file(file_path.c_str());//c_str():生成一个const char*指针,指向以空字符终止的数组。
std::string line;
pcl::PointXYZI point;
int index = 0;
while (getline(file, line)) {
std::stringstream ss(line);
ss >> point.x;
ss >> point.y;
ss >> point.z;
ss >> point.intensity;
cloud->push_back(point);
printf("%f,%f,%f,%f\n", point.x, point.y, point.z,point.intensity);
}
file.close();
printf("size %ld\n", cloud->size());
}
void visualization(pcl::PointCloud<pcl::PointXYZI>::Ptr cloud);
//------------------------------------------------------------------//
// 主函数,程序入口 //
//------------------------------------------------------------------//
int main(int argc, char** argv) {
// -------------------加载点云----------------------
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZI>);
CreateCloudIFromTxt("data.csv", cloud);
// -----------------可视化点云---------------------
visualization(cloud);
Sleep(100 * 1000);
return 0;
}
------------------------------------------------------------------//
子函数实现 //
------------------------------------------------------------------//
------------------数据可视化-------------------
void visualization(pcl::PointCloud<pcl::PointXYZI>::Ptr cloud)
{
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("viewer"));
// 添加需要显示的点云数据
pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZI> single_color(cloud, "intensity");
//pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZI> single_color(cloud, "i");
viewer->addPointCloud<pcl::PointXYZI>(cloud, single_color, "example");
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "example");
while (!viewer->wasStopped()) {
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
Part3: Total
1. 显示点云自带的颜色信息;
2. 根据点云的某个属性进行上色(例如:X,Y,Z等方向上不同颜色);
3. 自定义单一颜色(给某个点云显示同一个颜色);
4. 随机上色(由编译器随机给点云分配单一颜色);
5. 显示点云的法线方向和法向量;
/* \author Geoffrey Biggs */
#include <iostream>
#include <boost/thread/thread.hpp>
#include <pcl/common/common_headers.h>
#include <pcl/common/common_headers.h>
#include <pcl/features/normal_3d.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/parse.h>
// 帮助
void
printUsage(const char* progName)
{
std::cout << "\n\nUsage: " << progName << " [options]\n\n"
<< "Options:\n"
<< "-------------------------------------------\n"
<< "-s PointCloudColorHandlerRGBField example\n"
<< "-g PointCloudColorHandlerGenericField example\n"
<< "-c PointCloudColorHandlerCustom example\n"
<< "-r PointCloudColorHandlerRandom example\n"
<< "-n Normal visulization example\n"
<< "\n\n";
}
boost::shared_ptr<pcl::visualization::PCLVisualizer> colorHandler(pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud)
{
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Cloud"));
pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZRGB> rgb(cloud);
viewer->addPointCloud(cloud, rgb, "sample cloud");
return viewer;
}
boost::shared_ptr<pcl::visualization::PCLVisualizer> genericHandler(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud)
{
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Cloud"));
pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZ> rgb(cloud, "y");
viewer->addPointCloud(cloud, rgb, "sample cloud");
return viewer;
}
boost::shared_ptr<pcl::visualization::PCLVisualizer> customHandler(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud)
{
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> rgb(cloud, 0, 255, 255);
viewer->addPointCloud(cloud, rgb, "sample cloud");
return viewer;
}
boost::shared_ptr<pcl::visualization::PCLVisualizer> randomHandler(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud)
{
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer);
pcl::visualization::PointCloudColorHandlerRandom<pcl::PointXYZ> rgb(cloud);
viewer->addPointCloud(cloud, rgb, "sample cloud");
return viewer;
}
boost::shared_ptr<pcl::visualization::PCLVisualizer> normalHandler
(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, pcl::PointCloud<pcl::Normal>::Ptr cloud1)
{
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer);
pcl::visualization::PointCloudColorHandlerGenericField<pcl::PointXYZ> rgb(cloud, "z");
viewer->addPointCloud(cloud, rgb, "sample cloud");
viewer->addPointCloudNormals<pcl::PointXYZ, pcl::Normal>(cloud, cloud1, 10, 0.05, "normals");
return viewer;
}
// -----Main-----
int
main(int argc, char** argv)
{
// 解析命令行参数
printUsage(argv[0]);
std::cout << "Input your commend: ";
std::string commend;
getline(cin, commend);
bool simple(false), rgb(false), custom_c(false), normals(false),shapes(false);
if (commend == "-s")
{
simple = true;
}
else if (commend == "-g")
{
rgb = true;
}
else if (commend == "-c")
{
custom_c = true;
}
else if (commend == "-r")
{
normals = true;
}
else if (commend == "-n")
{
shapes = true;
}
// 自行创建一随机点云
pcl::PointCloud<pcl::PointXYZ>::Ptr basic_cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr(new pcl::PointCloud<pcl::PointXYZRGB>);
std::cout << "Genarating example point clouds.\n\n";
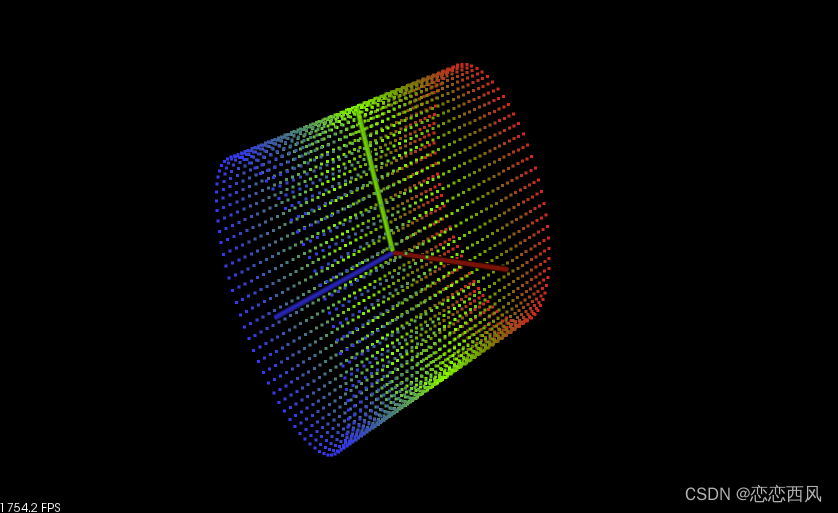
// 以椭圆为边线沿z轴拉伸获取其点云,并赋予红绿蓝渐变色。
uint8_t r(255), g(15), b(15);
for (float z(-1.0); z <= 1.0; z += 0.05)
{
for (float angle(0.0); angle <= 360.0; angle += 5.0)
{
pcl::PointXYZ basic_point;
basic_point.x = 0.5 * cosf(pcl::deg2rad(angle));
basic_point.y = sinf(pcl::deg2rad(angle));
basic_point.z = z;
basic_cloud_ptr->points.push_back(basic_point);
pcl::PointXYZRGB point;
point.x = basic_point.x;
point.y = basic_point.y;
point.z = basic_point.z;
uint32_t rgb = (static_cast<uint32_t>(r) << 16 |
static_cast<uint32_t>(g) << 8 | static_cast<uint32_t>(b));
point.rgb = *reinterpret_cast<float*>(&rgb);
point_cloud_ptr->points.push_back(point);
}
if (z < 0.0)
{
r -= 12;
g += 12;
}
else
{
g -= 12;
b += 12;
}
}
basic_cloud_ptr->width = (int)basic_cloud_ptr->points.size();
basic_cloud_ptr->height = 1;
point_cloud_ptr->width = (int)point_cloud_ptr->points.size();
point_cloud_ptr->height = 1;
// 0.05为搜索半径获取点云法线
pcl::NormalEstimation<pcl::PointXYZRGB, pcl::Normal> ne;
ne.setInputCloud(point_cloud_ptr);
pcl::search::KdTree<pcl::PointXYZRGB>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZRGB>());
ne.setSearchMethod(tree);
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals1(new pcl::PointCloud<pcl::Normal>);
ne.setRadiusSearch(0.05);
ne.compute(*cloud_normals1);
// 0.1为搜索半径获取点云法线
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals2(new pcl::PointCloud<pcl::Normal>);
ne.setRadiusSearch(0.1);
ne.compute(*cloud_normals2);
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer;
if (simple)
{
viewer = colorHandler(point_cloud_ptr);
}
else if (rgb)
{
viewer = genericHandler(basic_cloud_ptr);
}
else if (custom_c)
{
viewer = customHandler(basic_cloud_ptr);
}
else if (normals)
{
viewer = randomHandler(basic_cloud_ptr);
}
else if (shapes)
{
viewer = normalHandler(basic_cloud_ptr, cloud_normals1);
}
viewer->setBackgroundColor(1, 1, 1);
viewer->addCoordinateSystem(1.0);
viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
viewer->initCameraParameters();
// 主循环
while (!viewer->wasStopped())
{
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
}
Part4: Multiple viewer
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("Display"));
int v1(0);
viewer->createViewPort(0, 0, 0.5, 1, v1);
viewer->setBackgroundColor(0, 0, 0, v1);
viewer->addText("0kinect_1pcl" , 10, 10, "v1 text", v1);
pcl::visualization::PointCloudColorHandlerRGBField <PointT> rgb(cloud);
viewer->addPointCloud<PointT>(cloud, rgb, "cloud", v1);
int v2(0);
viewer->createViewPort(0.5, 0, 1, 1, v2);
viewer->setBackgroundColor(0, 0, 0, v2);
viewer->addText("handled_0kinect_1pcl" , 10, 10, "v2 sftext", v2);
pcl::visualization::PointCloudColorHandlerRGBField <PointT> handled_rgb(handled_cloud);
viewer->addPointCloud<PointT>(handled_cloud, handled_rgb, "handled_cloud", v2);
Part5: 鼠标点击处显示文本
viewer->registerMouseCallback(mouseEventOccurred, (void*)&viewer);
void mouseEventOccurred(const pcl::visualization::MouseEvent &event,void* viewer_void)
{
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer = *static_cast<boost::shared_ptr<pcl::visualization::PCLVisualizer> *> (viewer_void);
if (event.getButton() == pcl::visualization::MouseEvent::LeftButton &&
event.getType() == pcl::visualization::MouseEvent::MouseButtonRelease)
{
std::cout << "Left mouse button released at position (" << event.getX() << ", " << event.getY() << ")" << std::endl;
char str[512];
sprintf(str, "text#%03d", text_id++);
viewer->addText("clicked here", event.getX(), event.getY(), str);
}
}















 674
674











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











