







参考:
伺服三环设计—位置环前馈环路设计
前馈控制作用
前馈控制主要应用于该控制系统本身存在较大的滞后作用,如果单单是在系统产生误差之后去控制的话,那么系统总是跟在干扰后面波动,系统无法稳定.前馈的基本观点就是建立按扰动量进行补偿的开环控制,也就是说当影响系统的扰动出现时,按照扰动量的大小直接产生相应的矫正作用,抵消扰动的影响.当控制算式选的恰当时,可以达到很高的控制精度。
前馈控制设计
作者调试过几家伺服驱动产品,不管是带载(5-30倍惯量)还是空载,没有前馈时位置环跟踪误差100机械角度都有可能,加前馈至100%后,位置环跟踪误差在1机械角度上下。但是不是前馈加满就一定最好,前馈过大会导致速度环的给定出现波动,电机出现高频震动。
1,位置环一般怎么设计?
很多论文上面说电流环(ACR)、速度环(ASR)一般使用PI调节器,位置环适用P调节器即可,这种说法其实不够严谨,因为只有Kpos时,位置环必然会有稳态误差(误差与Kpos值呈反比),这个在实际应用中是允许的。目前位置环主要有两种设计方案:1,对位置指令和位置反馈的误差进行累加,累加器经过Kpos后,送给速度环的给定。
2,位置环引入积分环节,即位置环设计成PI调节器。
第一种设计方案居多。(如果有水友遇到其他设计思路的可以私信交流,哈哈)
2,为什么需要位置环前馈环路?
以上述第一种位置环设计思路为例,我们会根据电机参数、速度环增益等,设计出合适的Kpos,使位置环不会产生超调。(例如在雕铣行业,位置环出现超调意味着料就废了,所以一般走位置控制的都不期望超调)。这就意味着不能一直通过增加Kpos值来提高位置环的响应速度。所以需要前馈的参与,来提高系统的响应。(通过分析增加前馈后系统闭环传递函数可以看出,增加前馈不影响系统的极点,不会影响系统的整体稳定性)。
3,位置环前馈设计方法。
设计位置环一般把速度闭环做个等效,然后去设计前馈和位置环(APR)。
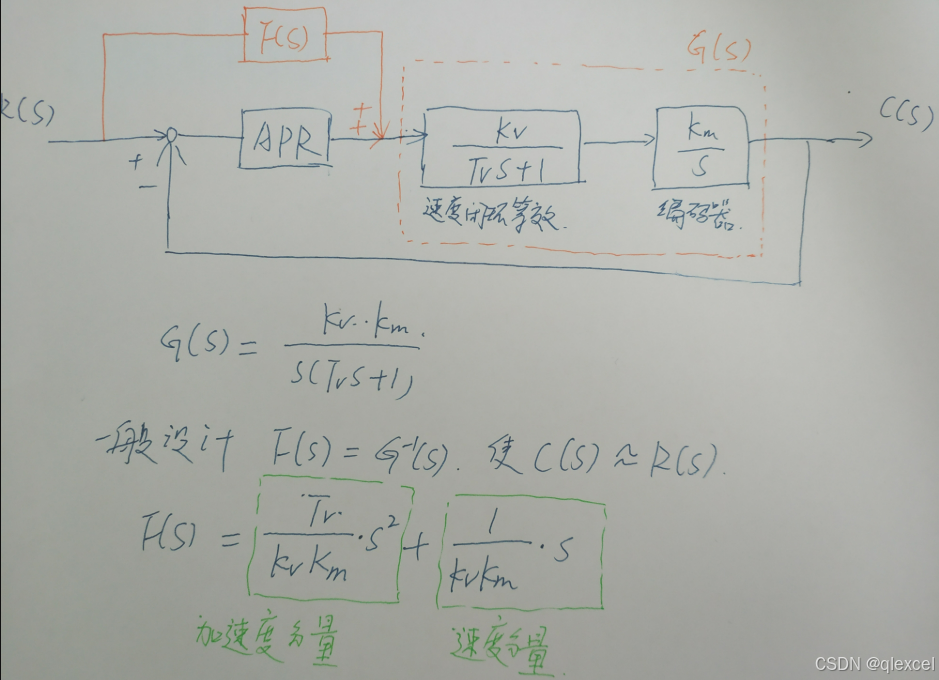
最后对F(S)进行离散化处理即可,前向欧拉就可以,然后转换成代码写到MCU。
亲测:即使只使用位置前馈中速度分量,位置环的跟踪响应也会得到大大改善。这个也比较好理解,当F(s)这部分分量变多后,APR输出的分量就会减小,因为APR的输出就是位置误差的累加,最终产生的效果就是位置环跟踪误差变小。


















 352
352

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











