







在行星齿轮设计中多数时行星齿轮是均布安装的,少数情况也有不均布安装,下面就其设计进行理论说明:
1、不考虑齿圈时,将行星齿轮安装到太阳轮可以是任意角度安装
2、同理不考虑太阳轮时,将行星齿轮安装到齿圈可以是任意角度安装
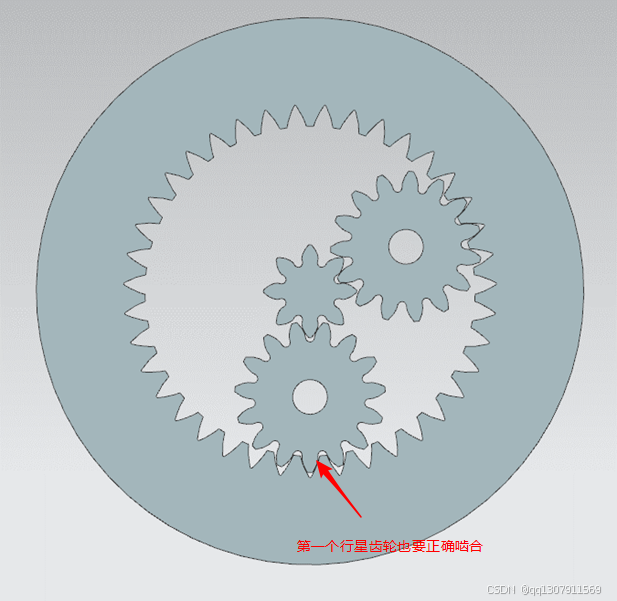
3、以第一个行星齿轮作为参考点,将其安装到太阳轮上,此时可以调整齿圈的角度,让齿圈与行星齿轮正常啮合
4、当第一个行星齿轮安装完成后,转动齿圈一个齿,齿圈与行星齿轮可正确啮合,以此类推只要齿圈转动整数齿就可以正确啮合
5、固定太阳轮,将行星齿轮绕太阳轮公转一个角度a,此时齿圈转动的角度为b,a和b根据行星排运动关系满足公式(0-a)/(b-a)=-z3/z1,其中z3为齿圈齿数取正数,z1为太阳轮齿数取正数
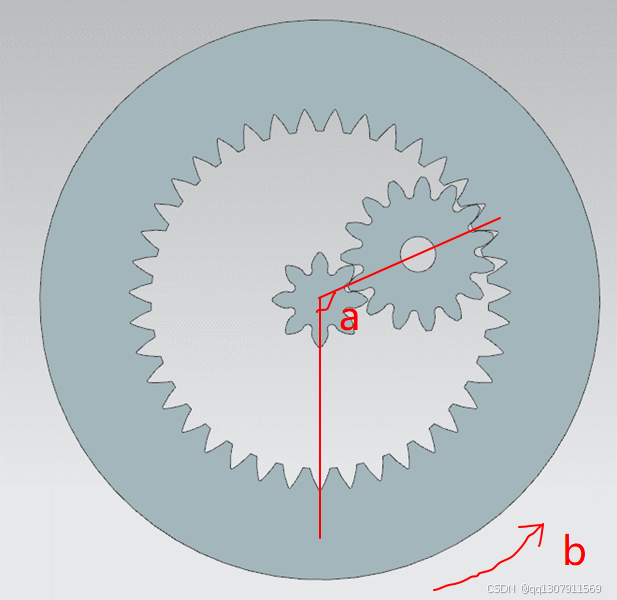
6、根据上述理论,齿圈转动角度为b,转动齿数为b/(360/z3),其转动的齿数为整数时可以保证第一个行星齿轮正确安装
7、结合等式(0-a)/(b-a)=-z3/z1,b/(360/z3)=整数,即(z1+z3)a/360=整数,行星齿轮个数为N均布安装角度为360/N,即360/N(z1+z3)/360=整数,即(z1+z3)/N=整数,这就是均布安装时齿数必须满足的条件
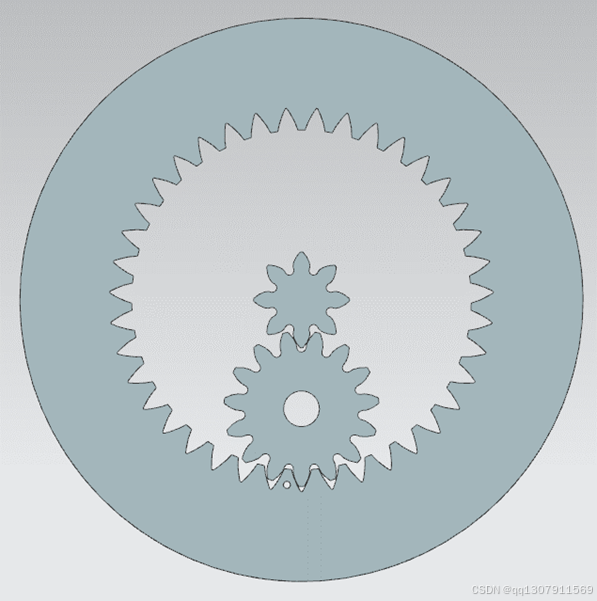
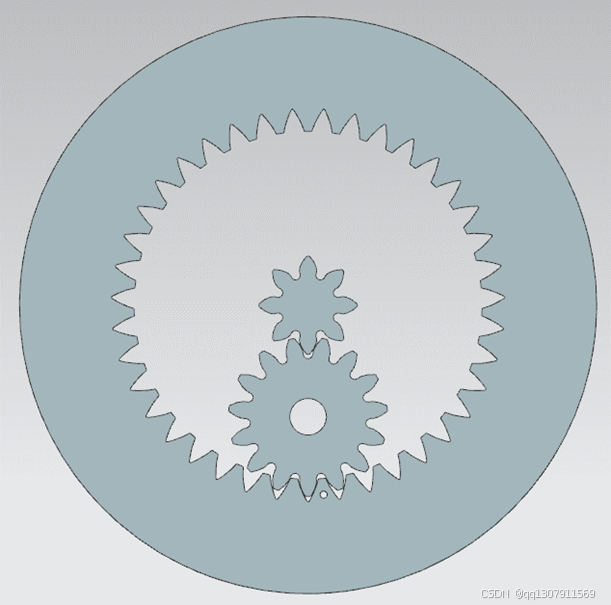
8、以示意图片中的行星排为例,太阳轮8齿,齿圈39齿,行星齿轮个数3,(z1+z3)*a/360=整数时,安装角度a接近120°的实际角度为360/(z1+z3)*15=114.8936,360/(z1+z3)*15=122.5532
总结
- 行星齿轮均布安装时其齿数应该满足(z1+z3)/N为整数
- 行星齿轮无法均布安装时,其安装相位角即行星齿轮夹角a应满足:(z1+z3)*a/360为整数
z1为太阳轮齿数,z3为齿圈齿数取正数,N为行星齿轮个数

















 3640
3640

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









