







一 Console输出调试
环境:ubuntu14.04LTS
目的:ardupilot中的example提供了printf函数打印到Console,可以用printf来理解与调试相关代码区。
基础调试
step 1:编译library/AP_HAL_PX4/example/simple中的例子,使用make px4-v2-upload下载程序。
step 2::下载cutecom(sudo apt-get install cutecom),打开cutecom:cutecom,选择dev/ttyACM0,波特率57600
也可以用命令执行:cu –l/dev/ttyACM0 –s 57600 连接成功会显示Connected.

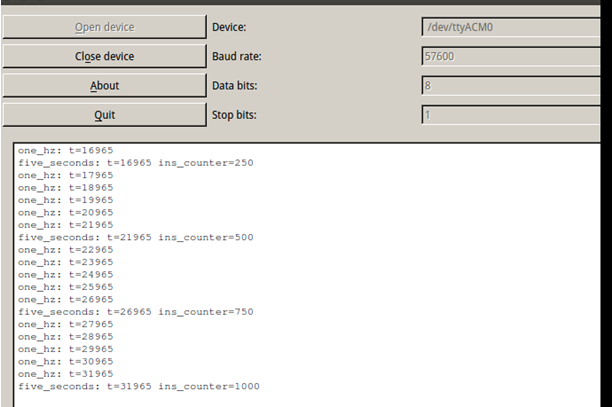
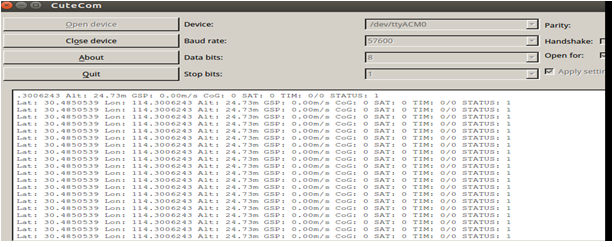
console下成功输出了hello world,在此基础上又烧写了gps与schedule的例子,都能成功显示
进阶调试
在libraries/AP_HAL_PX4/example/simple/simple.c中,输出主要是hal.console->println("hello world")&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1593
1593











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









