







目录

一 概要
激光雷达(Light Detection and Ranging,LiDAR)是一种通过发射激光束并测量反射光来获取目标物体距离、速度、角度等信息的主动式遥感技术。它在自动驾驶、测绘、机器人等领域有着广泛应用。
激光雷达本质上是一种光探测与测距设备,通过向目标物体发射激光脉冲,然后接收从物体表面反射回来的激光信号,依据特定算法计算出目标物体的相关参数,从而实现对周围环境的感知与测绘。
二 原理
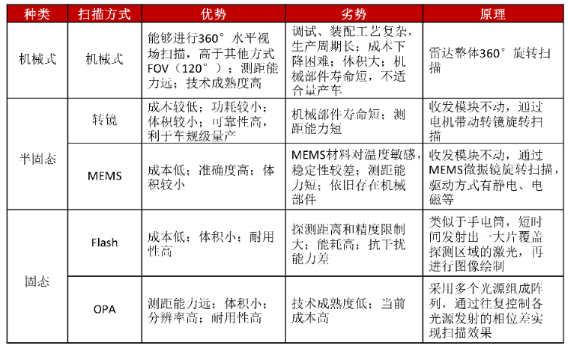
A 按扫描方式对激光雷达进行分类
| 按照扫描方式的分类 | ||
| 类型 | 架构 | 代表企业 |
| 机械式 | 机械旋转 | Ouster、RIGEL、速腾、禾赛、北科天绘 |
| 半固态 | MEMS | Innoviz(以色列)、速腾、禾赛、华为 |
| 转镜 | Innovusion(美国)、法雷奥、镭神 | |
| 棱镜 | 大疆Livox | |
| 固态 | FLASH | Leddar Tech、北醒光子、Ibeo |
| OPA | Quanergy、力策科技 | |
B 基本原理
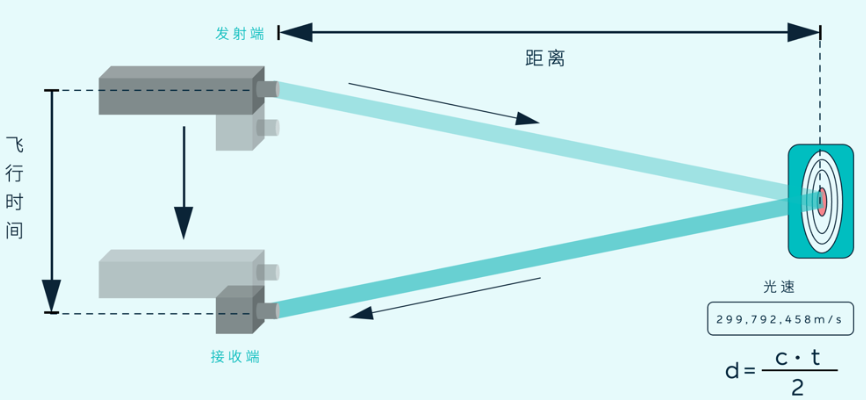
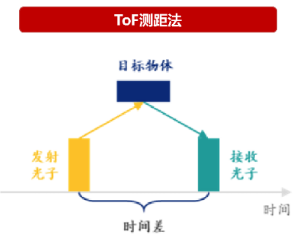
距离测量原理:激光雷达工作时,发射系统向目标物体发射激光脉冲,当激光脉冲遇到目标物体后会发生反射,反射光被接收系统捕获。通过精确测量激光脉冲从发射到接收的时间间隔(Time of Flight,ToF),结合光在空气中的传播速度(约为 299792458m/s ),利用公式d=c×Δt/2(d表示目标物体的距离,c为光速,Δt是激光脉冲往返的时间差),就能计算出目标物体与激光雷达之间的距离。
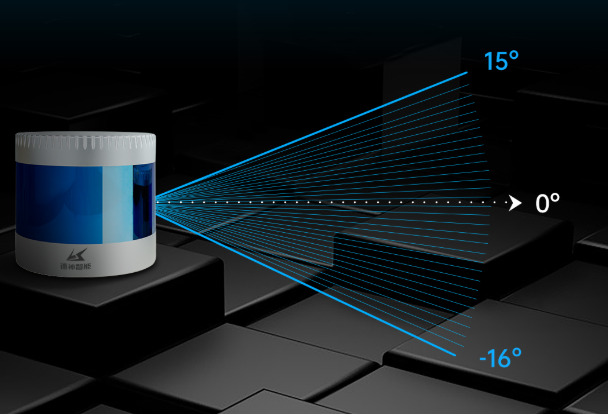
角度测量原理:激光雷达通常配备扫描装置,常见的有机械旋转式、MEMS(微机电系统)扫描式、相控阵扫描式等。机械旋转式通过电机带动激光发射和接收装置旋转,在不同角度发射和接收激光,确定激光束的出射角度,进而得到目标物体的角度信息;MEMS 扫描式利用微机电系统控制微小反射镜的摆动来改变激光束的方向;相控阵扫描式则是通过控制多个发射单元的相位差,实现激光束的扫描和角度控制。
速度测量原理:基于多普勒效应,当激光雷达与目标物体存在相对运动时,反射光的频率会发生变化。通过测量发射光与反射光的频率差(多普勒频移),结合激光的波长等信息,利用多普勒频移公式v=2λ×fd (v表示目标物体的速度,λ为激光波长,fd 为多普勒频移),可以计算出目标物体相对于激光雷达的速度。
C 不同类型激光工作原理
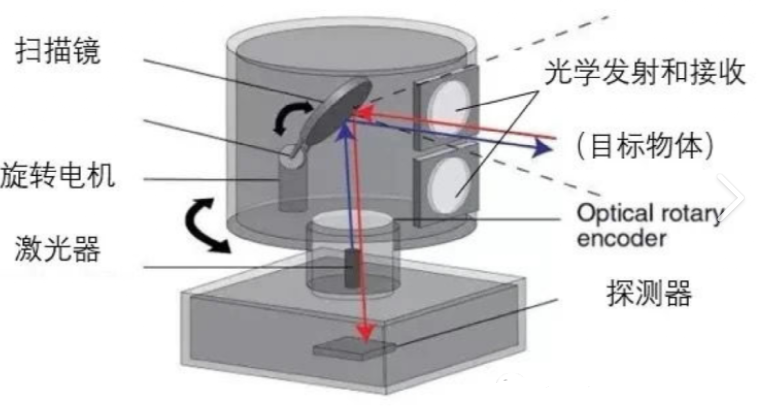
b1 机械脉冲式激光雷达
机械脉冲式激光雷达通过机械运动带动激光收发装置,以脉冲形式发射激光并接收反射光,借此获取环境信息,其工作原理具体如下:
激光发射:内部激光器受脉冲发生器触发,发射高能量、窄脉宽激光脉冲,常见波长有 905nm 或 1550nm 。例如在自动驾驶场景中,脉冲激光为后续感知环境提供信号源。
机械扫描:电机驱动旋转装置带动激光发射与接收模块旋转,使激光束按设定角度扫描周围空间。如在无人驾驶车辆行驶时,能 360° 全方位扫描周围环境。
反射光接收:激光脉冲遇目标物体反射,部分反射光沿原光路返回,被激光雷达接收模块捕获,该模块含光学镜头与光电探测器。
时间测量:激光雷达精确记录激光发射与反射光接收的时间,两者时间差即激光脉冲往返时间,借助高精度计时器实现。
距离计算:依据光在空气中的传播速度,用公式d=c×Δt/2(d为目标距离,c是光速,Δt为时间差)算出目标物体与激光雷达的距离。
角度确定:机械扫描装置运转时,编码器实时记录扫描角度,确定激光束发射方向。
点云生成:把测量的距离与角度信息融合,经算法处理得到目标物体空间坐标,众多坐标点构成三维点云数据,直观呈现周围环境。
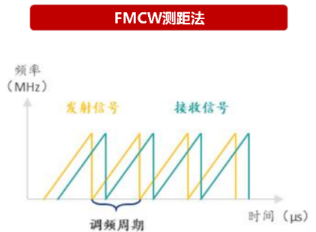
b2 相位式激光雷达
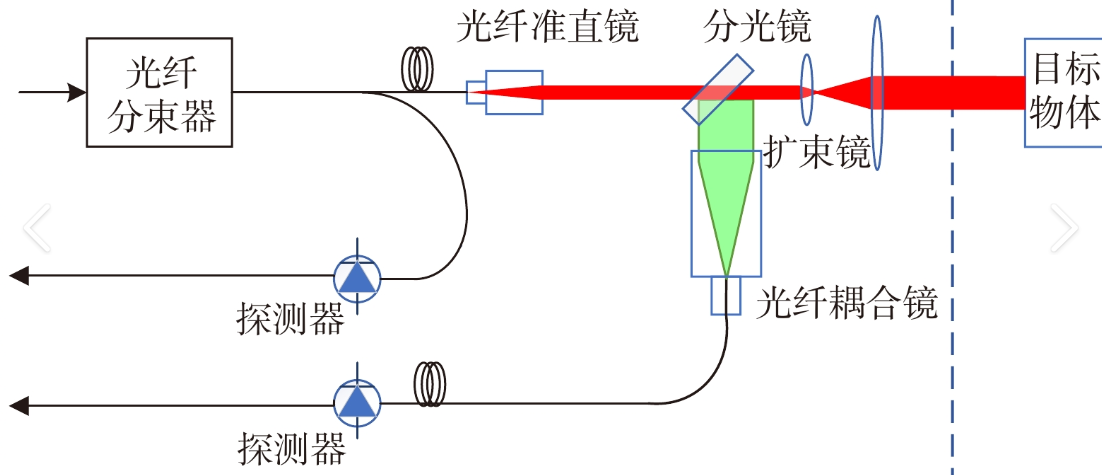
激光发射与调制
发射光源:相位式激光雷达通常采用连续波激光作为发射光源,常见的如半导体激光器。这种激光器能够稳定地输出连续的激光束,为后续的测量提供稳定的信号基础。
调制方式:为了能够测量相位差,需要对发射的激光进行调制。常见的调制方式是正弦波调制,即通过调制电路使激光的强度按照正弦波的规律变化。假设调制信号的角频率为 ω,则调制后的激光强度 I(t)可以表示为 I(t)=I0 +Im sin(ωt),其中 I0 是激光的直流分量, Im 是调制信号的幅度。
目标反射与信号接收
反射过程:发射的调制激光束在传播过程中遇到目标物体后,部分激光会被反射回来。反射光的强度和相位会受到目标物体的材质、形状、表面粗糙度以及与激光雷达的距离等因素的影响。
接收系统:反射回来的激光信号被激光雷达的接收系统捕获。接收系统主要包括光学透镜、光电探测器等。光学透镜将反射光聚焦到光电探测器上,光电探测器(如光电二极管)会将光信号转换为电信号。由于反射光带有目标物体的距离信息,通过检测电信号的相位变化,就可以间接获取目标物体的距离。
相位差测量
参考信号与接收信号:为了测量相位差,激光雷达内部会产生一个与发射激光同频率、同相位的参考信号。接收系统接收到的反射光信号经过光电转换后,与参考信号一起输入到相位检测电路中。
相位检测方法:相位检测电路可以采用多种方法来测量两个信号之间的相位差。常见的方法有模拟乘法器法和数字相关法。模拟乘法器法是将参考信号和接收信号通过模拟乘法器相乘,然后对乘积信号进行低通滤波,得到的直流分量与两个信号的相位差成正比。数字相关法是将参考信号和接收信号进行数字化处理,然后通过数字相关算法计算出它们之间的相位差。假设参考信号为 Asin(ωt),接收信号为 Bsin(ωt+Δφ),经过相位检测电路后得到的相位差 Δφ就是我们需要测量的关键参数。
距离计算
距离计算公式:根据光的传播原理,激光在空气中的传播速度为 c(约为 299792458m/s)。由于调制信号的波长 λ=fc (其中 f是调制信号的频率),而激光往返的距离 d与相位差 Δφ之间存在关系 d=4πλΔφ 。通过测量得到的相位差 Δφ,就可以计算出目标物体与激光雷达之间的距离 d。
扫描与数据生成
扫描方式:相位式激光雷达同样需要通过扫描来获取周围环境的三维信息。常见的扫描方式有机械扫描、MEMS(微机电系统)扫描和相控阵扫描等。机械扫描通过电机带动激光发射和接收装置旋转,实现激光束在空间中的扫描;MEMS 扫描利用微机电系统控制微小反射镜的摆动来改变激光束的方向;相控阵扫描则是通过控制多个发射单元的相位差,实现激光束的扫描。
数据生成:在扫描过程中,激光雷达不断发射调制激光并测量每个方向上目标物体的距离,同时记录每个测量点的角度信息。将距离信息和角度信息结合起来,就可以生成目标物体的三维空间坐标,最终形成周围环境的三维点云数据。这些点云数据可以用于各种应用,如自动驾驶中的障碍物检测与识别、地图构建;机器人导航中的环境感知与路径规划等。
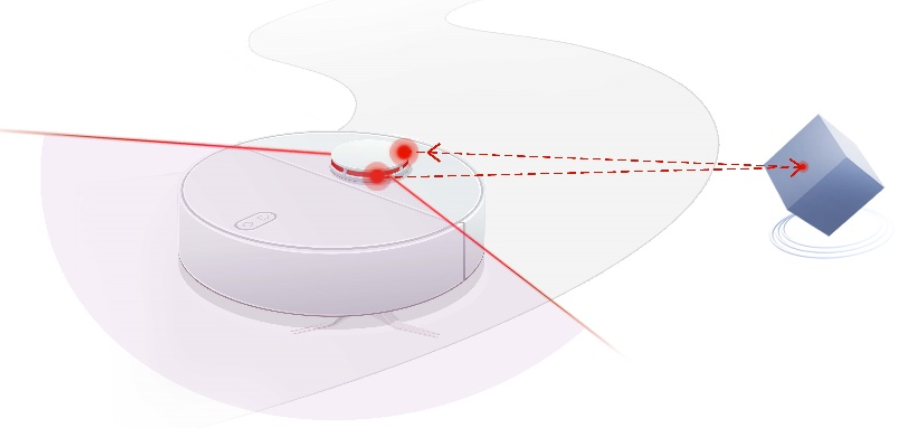
b3 三角测量激光雷达工作原理
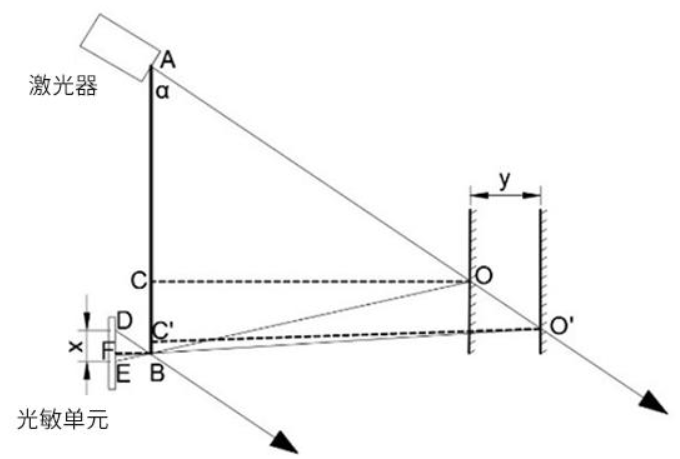
基本原理架构
三角测量雷达主要由激光发射单元、图像传感器和信号处理单元构成。激光发射单元用于向目标物体发射激光束,图像传感器负责接收从目标物体反射回来的激光光斑图像,信号处理单元则对接收的图像信息进行分析和处理,以计算出目标物体的相关参数。
激光发射与反射
激光发射:激光发射单元发射出一束特定形状(通常为线激光)的激光束。该激光束以一定角度照射到目标物体表面。例如,在工业检测场景中,线激光可快速覆盖目标物体的某一截面,便于后续测量。激光的波长一般根据应用场景和测量需求选择,常见的有 650nm(红色激光)等,这些波长在常见环境中具有较好的可视性和稳定性。
反射过程:激光束照射到目标物体表面后发生反射,反射光携带了目标物体表面的位置和形状信息。反射光的强度和方向取决于目标物体的材质、表面粗糙度以及激光束与目标物体的夹角等因素。光滑表面的反射光相对集中且强度较高,而粗糙表面会使反射光发生散射,强度有所减弱。
图像传感器接收与成像
传感器工作:图像传感器(如 CMOS 或 CCD 传感器)被放置在与激光发射单元有一定角度的位置上。当反射光进入图像传感器的视场时,传感器会捕捉到反射激光形成的光斑图像。传感器上的每个像素点都对应着一定的空间角度范围,通过检测光斑在传感器上的成像位置,可以间接获取目标物体的位置信息。
成像原理:根据三角测量原理,激光发射单元、图像传感器和目标物体上的反射点构成一个三角形。已知激光发射单元与图像传感器之间的基线距离(固定值)以及激光束与传感器平面的夹角(设计时确定),通过测量反射光斑在图像传感器上的位置(像素坐标),利用三角函数关系就可以计算出目标物体与雷达之间的距离。例如,假设基线距离为 L,激光束与传感器平面夹角为 θ,反射光斑在传感器上偏离中心位置的像素数为 x,像素间距为 p,则目标物体距离 d的计算公式为 d=tan(θ)×xL×p (简化公式,实际计算可能更复杂)。
信号处理与距离计算
信号处理流程:图像传感器将接收到的光斑图像转换为电信号,然后传输给信号处理单元。信号处理单元首先对电信号进行模数转换,将其转换为数字信号,便于后续的数字处理。接着,通过图像处理算法对数字图像进行分析,识别出光斑的中心位置、形状等特征。这些算法包括边缘检测、阈值分割、质心计算等。例如,通过边缘检测算法可以确定光斑的轮廓,再利用质心计算算法得到光斑的精确中心位置。
距离计算:根据之前建立的三角测量模型,信号处理单元利用测量得到的光斑位置信息以及已知的系统参数(基线距离、激光束角度等),按照相应的数学公式计算出目标物体与雷达之间的距离。在实际应用中,为了提高测量精度,通常会对多次测量的数据进行滤波、平均等处理,以减小噪声和测量误差的影响。
多维度测量与应用
多维度测量:通过移动三角测量雷达或者让目标物体移动,同时结合多个角度的测量数据,可以实现对目标物体的三维形状和位置的精确测量。例如,在工业自动化生产线上,通过对物体进行多角度的三角测量,可以获取物体的完整三维模型,用于质量检测、尺寸测量等。
b4 微震镜(MEMS)激光雷达工作原理
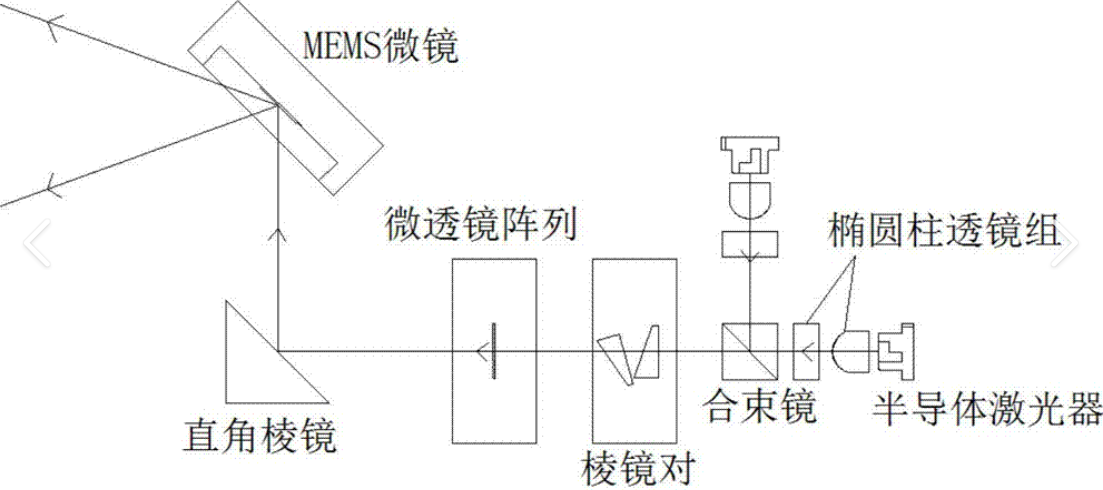
微震镜(MEMS)激光雷达整合了 MEMS 微振镜技术来精准控制激光束扫描方向,实现对环境的三维感知,其工作原理主要涵盖以下关键环节:
激光发射
光源选择:一般采用半导体激光器作为光源,能够稳定输出连续波激光或脉冲激光,为探测目标提供基础光信号。例如在常见的车载应用中,半导体激光器可发射波长 905nm 或 1550nm 的激光。
光束准直:从激光器射出的激光束需经准直光学元件(如准直透镜)处理,将发散的激光转变为平行光束,确保激光在传播过程中保持较好的方向性,减少能量损耗。
MEMS 微振镜扫描
微振镜结构与原理:MEMS 微振镜是核心组件,由硅基微加工工艺制造,尺寸微小却能实现精确控制。它通过静电、电磁或压电等驱动方式实现高速摆动。以静电驱动为例,在微振镜电极与周围电极间施加电压,利用静电力产生扭矩,使微振镜绕轴旋转。
扫描模式:能实现一维或二维扫描。一维扫描时,微振镜在一个方向上摆动,结合激光雷达其他结构可完成特定平面内的扫描;二维扫描则通过控制微振镜在两个正交方向的摆动,使激光束在空间形成二维扫描图案,如常见的矩形或圆形扫描区域。
目标反射与信号接收
反射光特性:发射的激光束遇到目标物体后发生反射,反射光的强度、相位及时间延迟等特性携带着目标物体的距离、材质、形状等信息。例如,光滑金属表面反射光强,而粗糙表面反射光弱且散射多。
接收系统构成:接收系统由光学聚焦元件(如透镜组)、光电探测器(如雪崩光电二极管 APD)等组成。光学聚焦元件将反射光汇聚到光电探测器上,光电探测器把光信号转化为电信号,便于后续处理。
距离测量
脉冲式测距原理:若采用脉冲激光,通过测量激光发射与接收反射光的时间差(Time of Flight,ToF),结合光速计算目标距离,公式为d=c×Δt/2(d为距离,c为光速,Δt为时间差)。
相位式测距原理:对于连续波调制激光,测量发射光与反射光的相位差来计算距离。如调制信号波长为λ,相位差为Δφ,距离公式为d=4πλΔφ 。
角度确定
扫描角度关联:MEMS 微振镜的摆动角度与激光束的出射角度直接相关。通过精确控制微振镜的驱动信号,能确定激光束在空间中的扫描角度。例如,已知微振镜摆动角度与激光出射角度的对应关系,结合微振镜当前摆动角度,即可得到激光束此时的出射角度。
角度测量精度:MEMS 微振镜的高精度控制特性,使得激光雷达能够精确测量激光束扫描角度,为后续精确构建目标物体三维坐标奠定基础。
点云数据生成:在扫描过程中,激光雷达不断发射激光并接收反射信号,测量每个扫描点的距离与角度信息。将这些信息整合,经算法处理后生成目标物体的三维空间坐标,众多坐标点构成三维点云数据,直观呈现周围环境。
b5 FLASH激光雷达工作原理
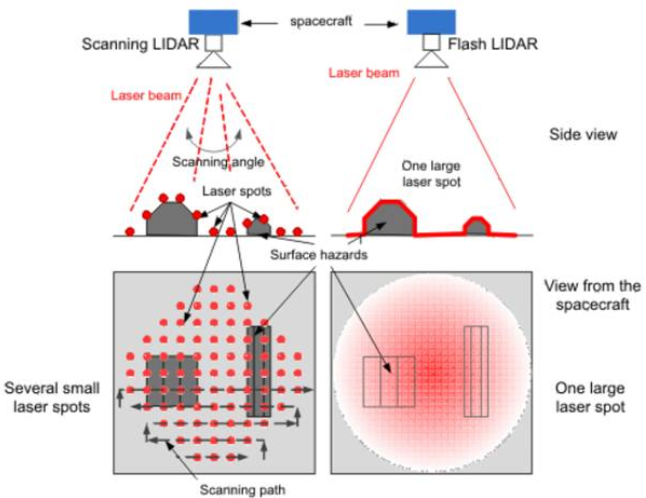
激光发射
大面积光源:FLASH 激光雷达使用一个大面积的激光光源,常见的如垂直腔面发射激光器(VCSEL)阵列。这种光源能够同时向整个视场发射激光脉冲,与传统激光雷达逐点扫描发射激光的方式截然不同。例如,在一个车载应用场景中,激光光源瞬间照亮车辆前方较大范围的空间区域,一次发射即可覆盖可能存在障碍物或目标物体的整个场景。
脉冲特性:发射的激光脉冲具有特定的波长和能量。波长通常在近红外波段,如 905 纳米或 1550 纳米,这些波长在大气中传播时具有较好的穿透性和较低的衰减。激光脉冲的能量需要根据应用场景和测量距离进行合理设置,以确保能够获得足够强度的反射光信号。
反射光接收与探测器工作
面阵探测器:与大面积发射光源相对应,FLASH 激光雷达配备了一个面阵探测器,例如互补金属氧化物半导体(CMOS)或雪崩光电二极管(APD)面阵探测器。面阵探测器由众多的感光单元组成,这些感光单元能够同时接收来自不同方向的反射光信号。当发射的激光脉冲照射到目标物体上并反射回来时,面阵探测器上的各个感光单元会根据其对应的空间位置,分别接收不同位置目标物体反射的光信号。
信号转换与记录:每个感光单元在接收到反射光后,会将光信号转换为电信号。以 CMOS 探测器为例,光子撞击感光单元中的光电二极管,产生电子 - 空穴对,这些电荷通过电路进行收集和放大,进而转换为数字信号。探测器会记录下每个感光单元接收到反射光的时间以及信号强度等信息。
距离计算
时间飞行法(ToF)原理应用:FLASH 激光雷达基于时间飞行法(Time of Flight,ToF)来计算目标物体的距离。激光从发射到被探测器接收的时间间隔,即激光脉冲的飞行时间,与目标物体的距离密切相关。根据公式 d=c×Δt/2(其中 d表示目标物体的距离, c为光在真空中的传播速度,约为 299792458m/s, Δt是激光脉冲从发射到接收的时间差),通过测量每个感光单元对应的激光飞行时间,就能计算出该感光单元所对应方向上目标物体与激光雷达之间的距离。
距离数据生成:面阵探测器上的大量感光单元同时进行距离计算,从而一次性获取整个视场内众多目标点的距离信息。这些距离信息以矩阵的形式排列,与探测器上感光单元的位置相对应,构成了目标场景的距离图像。
点云数据生成
点云构建:将距离信息与探测器上感光单元的位置信息相结合,就可以确定每个目标点在三维空间中的坐标。通过对整个视场范围内所有目标点的坐标进行整合,最终生成三维点云数据。点云数据中的每个点都包含了其在空间中的位置信息(X、Y、Z 坐标),以及可能的反射强度等属性信息,直观地呈现了周围环境中目标物体的分布情况。
b6 OPA激光雷达工作原理
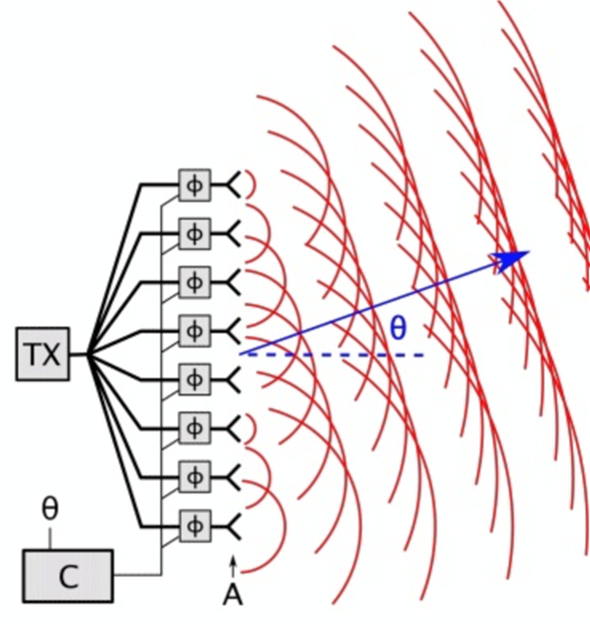
激光发射与相控阵原理
激光源:OPA 激光雷达通常采用固态激光器作为光源,例如半导体激光器。这类激光器能稳定输出高质量的激光束,为后续的测量与探测提供基础信号。以常见的车载 OPA 激光雷达为例,半导体激光器可发射特定波长(如 905nm 或 1550nm)的激光,该波长在大气环境中传输性能良好,可有效减少信号衰减。
相控阵单元:核心部件是光学相控阵芯片,由大量紧密排列的发射单元组成。每个发射单元都能独立调控所发射激光的相位。当激光从这些单元发射出来时,通过精确调整各个单元激光的相位差,利用光的干涉原理,可使激光束在空间中叠加形成特定方向的主波束。例如,当所有单元发射的激光相位相同时,激光束沿直线传播;而改变不同单元的相位,就能使激光束向不同方向偏转,实现无需机械运动部件的电子扫描。
相位控制:相位控制电路负责为每个发射单元提供精确的相位控制信号。通过调整这些信号的参数,如电压或电流,改变发射单元内光波导的物理特性(如折射率),进而改变激光的相位。复杂的算法根据所需的扫描模式和环境信息,实时计算并控制每个单元的相位,确保激光束能快速、精确地扫描指定区域。
激光束扫描与环境交互
电子扫描:OPA 激光雷达凭借相控阵技术实现电子扫描,相比传统机械扫描激光雷达,具有更快的扫描速度和更高的灵活性。它能在极短时间内完成对周围环境的快速扫描,例如在自动驾驶场景中,可迅速对车辆周围 360° 范围进行扫描,及时发现潜在障碍物或目标物体。
激光与目标作用:扫描过程中,发射的激光束遇到目标物体后发生反射、散射等现象。反射光携带目标物体的距离、形状、材质等信息返回。不同材质的物体对激光的反射特性不同,如金属表面反射率高,而植被等吸收和散射较多,反射光强度相对较弱。
反射光接收与信号处理
接收系统:包含光学接收元件(如透镜组)和探测器。光学接收元件负责收集反射光,并将其聚焦到探测器上。探测器通常采用光电二极管或雪崩光电二极管,将接收到的光信号转换为电信号。例如,在一个典型的 OPA 激光雷达接收系统中,透镜将反射光汇聚到雪崩光电二极管上,二极管产生与光强成正比的电信号输出。
信号处理:接收到的电信号首先经过放大、滤波等预处理操作,去除噪声干扰,提高信号质量。随后,通过测量反射光与发射光的时间延迟(对于脉冲激光雷达)或相位差(对于连续波调制激光雷达),结合光速,利用公式计算目标物体的距离。对于脉冲激光雷达,依据时间飞行法(ToF),公式为 d=c×Δt/2( d为距离, c为光速, Δt为时间差);对于连续波调制激光雷达,根据调制信号波长 λ和相位差 Δφ,距离公式为 d=4πλΔφ 。
角度确定:由于发射激光束的方向由相控阵的相位控制精确确定,因此可根据发射时的相位信息,结合扫描算法,准确计算出反射光对应的目标物体角度。例如,通过记录发射特定角度激光束时相控阵各单元的相位设置,当接收到该方向反射光时,就能确定目标物体所在角度。
点云数据生成
点云构建:将测量得到的距离和角度信息进行融合,经算法处理后,确定每个目标点在三维空间中的坐标。众多目标点的坐标集合形成三维点云数据,直观呈现周围环境中目标物体的分布情况。点云数据中的每个点都包含空间位置(X、Y、Z 坐标)以及可能的反射强度等属性信息。
三 对比
四 产品
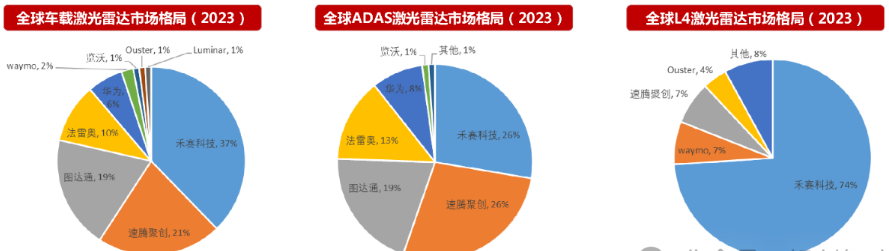
根据Yole统计,2023年全球车载激光雷达格局按营收统计,禾赛科技、速腾聚创排名TOP2,合计占比58%,而2021年法雷奥占比79%,23年仅占比10%。
根据Yole统计,2023年全球车载ADAS激光雷达格局按营收统计,禾赛科技、速腾聚创、图达通排名前三,占比分别为26%、26%、19%,合计占比71%。
根据Yole统计,2022年乘用车ADAS激光雷达市场规模首次超过了L4自动驾驶领域激光雷达的规模。2023年全球L4自动驾驶激光雷达格局按营收统计,禾赛科技、Waymo、速腾聚创排名前三,占比分别为74%、7%、7%,禾赛科技占有绝对优势。这里的L4自动驾驶激光雷达主要指用于Robotaxi的激光雷达。
根据高工智能汽车统计,2021年国内乘用车前装标配激光雷达交付量仅0.8万台。随着爆款车型逐渐上市及成本持续下降,2022年共交付13万台,是激光雷达量产元年。2023年国内激光雷达交付57万台,成为激光雷达爆发元年。2024激光雷达交付超150万台,交付137万辆车,同比+212%,前装搭载率升至6%,12月单月交付量首次突破20万台大关。按搭载车型排名来看,问界、理想、蔚来位列TOP3。
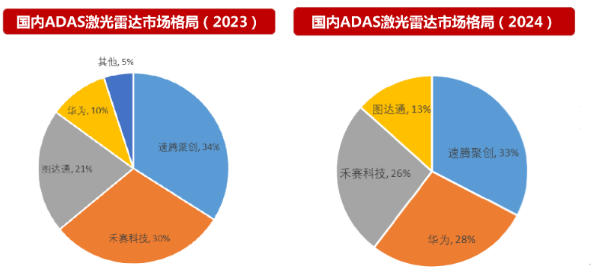
根据高工智能汽车统计,2023年国内激光雷达交付量方面,速腾聚创、禾赛科技、图达通、华为排名前四,分别交付25.6、21.1、15、7万台,合计占有95%的市场份额。2024年国内激光雷达交付量方面,速腾聚创、华为、禾赛科技、图达通合记占有100%市场份额,市场集中度持续提升。
五 结论




















 1990
1990

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











