









手眼标定
手眼标定不一定局限在机器人相机和末端执行器间变换的求解,任何求两个固连坐标系之间变换的问题都与手眼标定类似,比如多相机间外参的求解以及相机和IMU外参的求解。
问题形式
不涉及外系:
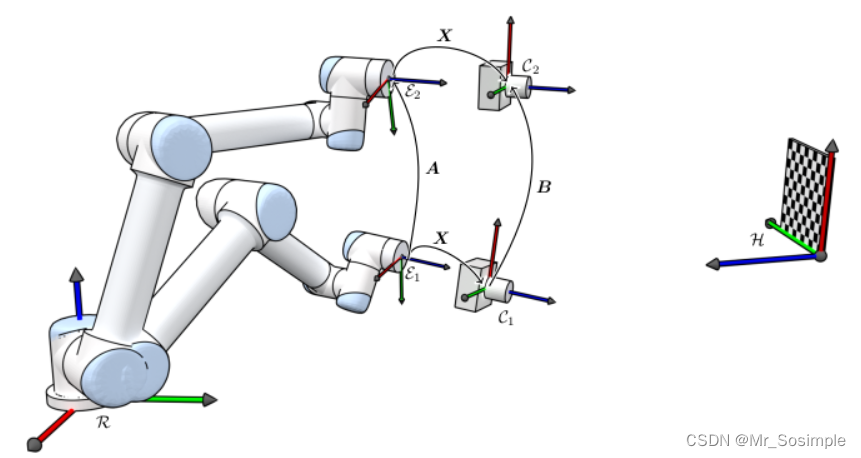
A
X
=
X
B
AX=XB
AX=XB
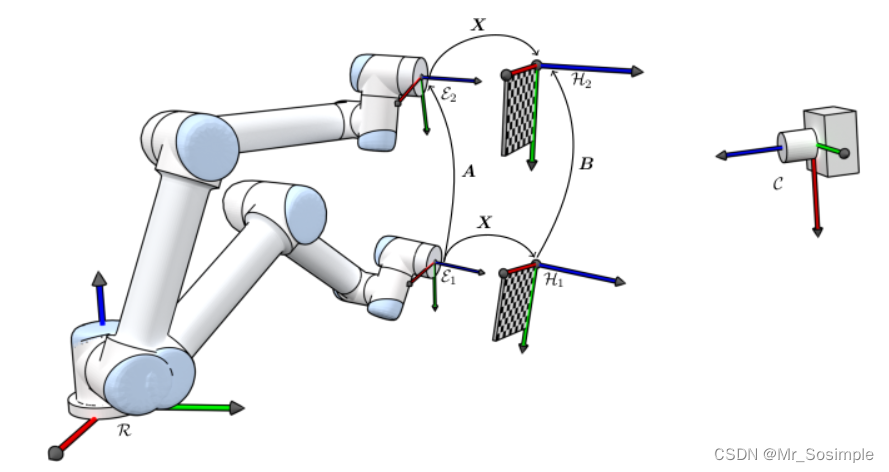
涉及一个参考外系Y:
A
X
=
Y
B
AX=YB
AX=YB
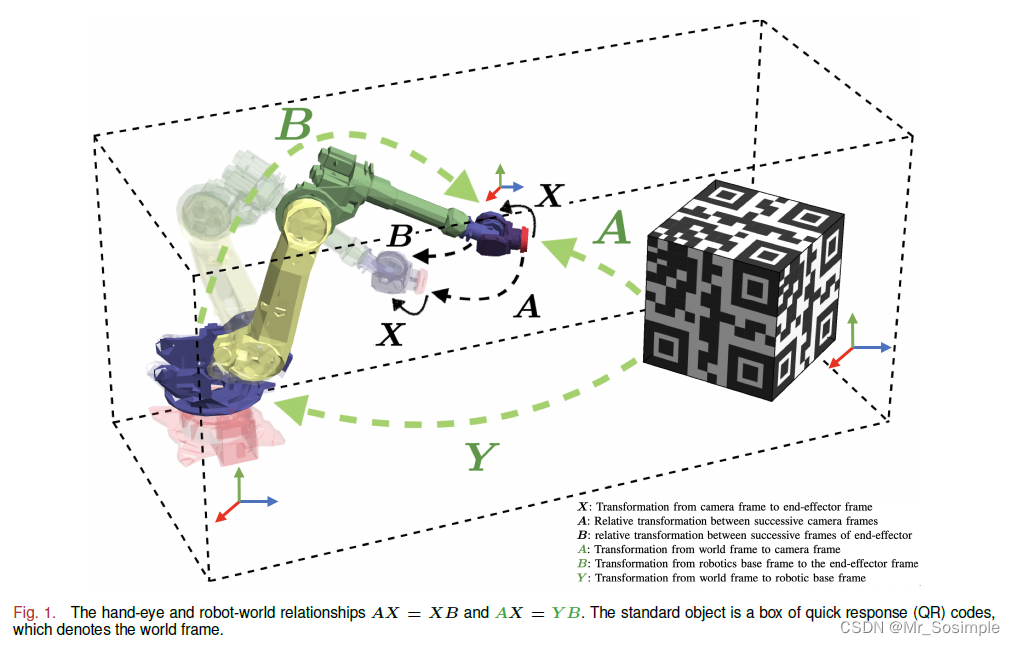
示意图
Reference
- https://www.torsteinmyhre.name/snippets/robcam_calibration.html
- https://robotics.stackexchange.com/questions/20437/understanding-types-of-hand-eye-calibration
- Wu, Jin, et al. “Globally optimal symbolic hand-eye calibration.” IEEE/ASME Transactions on Mechatronics 26.3 (2020): 1369-1379.















 875
875











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









