







Article info.
Time-of-Flight Sensor Calibration for a Color and Depth Camera Pair
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 37, NO. 7, JULY 2015
Introduction
- 传统标定方法不能很好地标定ToF相机对的主要原因是ToF传感器的特性。不像二维激光测距仪,三维ToF相机提供的图像精度较低,振幅图像模糊,分辨率较低。因此,必须对包含ToF相机的多传感器系统的标定过程进行设计,以克服TOF传感器的缺点。
- homography based camera calibration
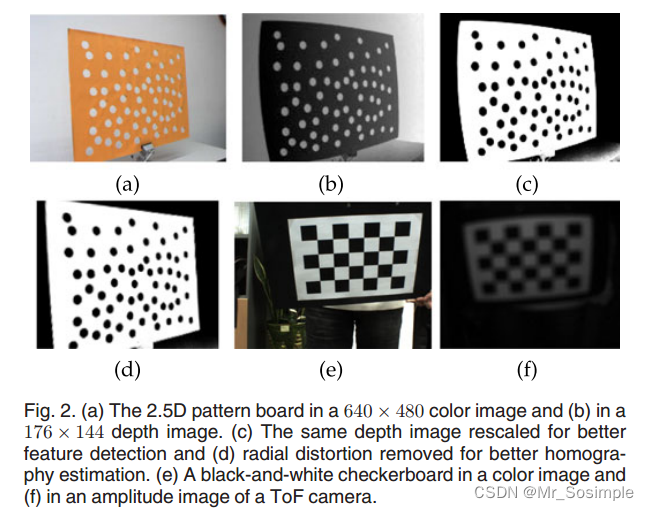
- 在 标定高质量彩色相机的情况下,黑白棋盘图像上的角检测产生非常精确的已知二维几何形状和图像的对应关系。然而,我们不能期望通过对ToF相机的振幅图像( amplitude image)进行角点检测获得如此精确的对应集,因为它们是模糊的,并且分辨率很低。对幅度图像进行预处理[19]或手动选择特征点可能是可能的替代方案,但我们建议使用ToF相机的深度图像。
处理TOF误差
- TOF误差和
Range以及distance of the pixel location from the image center有关,本文利用K-means对Range误差形式(波动形状)先进行了聚类,更细致地标定误差,这种方法值得借鉴。

Take home messages
- ToF相机系统误差:1. 距离相关误差 2. 径向误差。距离相关的误差由系统摆动误差形成的,它通过将距离信息明显地移向或移离传感器来改变测量距离,在ToF传感器发送信号与返回信号的相位差计算距离的过程中产生。由于硬件和成本的限制,正弦信号形状的理论假设通常是不合适的。对于dToF相机是否就不存在该类Range相关的误差了?
Resources
- 随机圆点Pattern识别:Automatic camera pose estimation from dot pattern
















 385
385

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









