







 超级会员免费看
超级会员免费看
 本文介绍了从零开始学习SLAM的过程中,使用TurtleBot3进行硬件结构解析、多机通信配置,包括SSH远程登录、网络设置等。详细阐述了地图生成、保存及在RVIZ中的显示,以及如何通过键盘控制TurtleBot3进行导航。涉及到的关键技术包括gmapping、roscore、turtlebot3_bringup、turtlebot3_teleop_key等。
本文介绍了从零开始学习SLAM的过程中,使用TurtleBot3进行硬件结构解析、多机通信配置,包括SSH远程登录、网络设置等。详细阐述了地图生成、保存及在RVIZ中的显示,以及如何通过键盘控制TurtleBot3进行导航。涉及到的关键技术包括gmapping、roscore、turtlebot3_bringup、turtlebot3_teleop_key等。
文章目录
硬件结构
TurtleBot3 官方网站
https://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
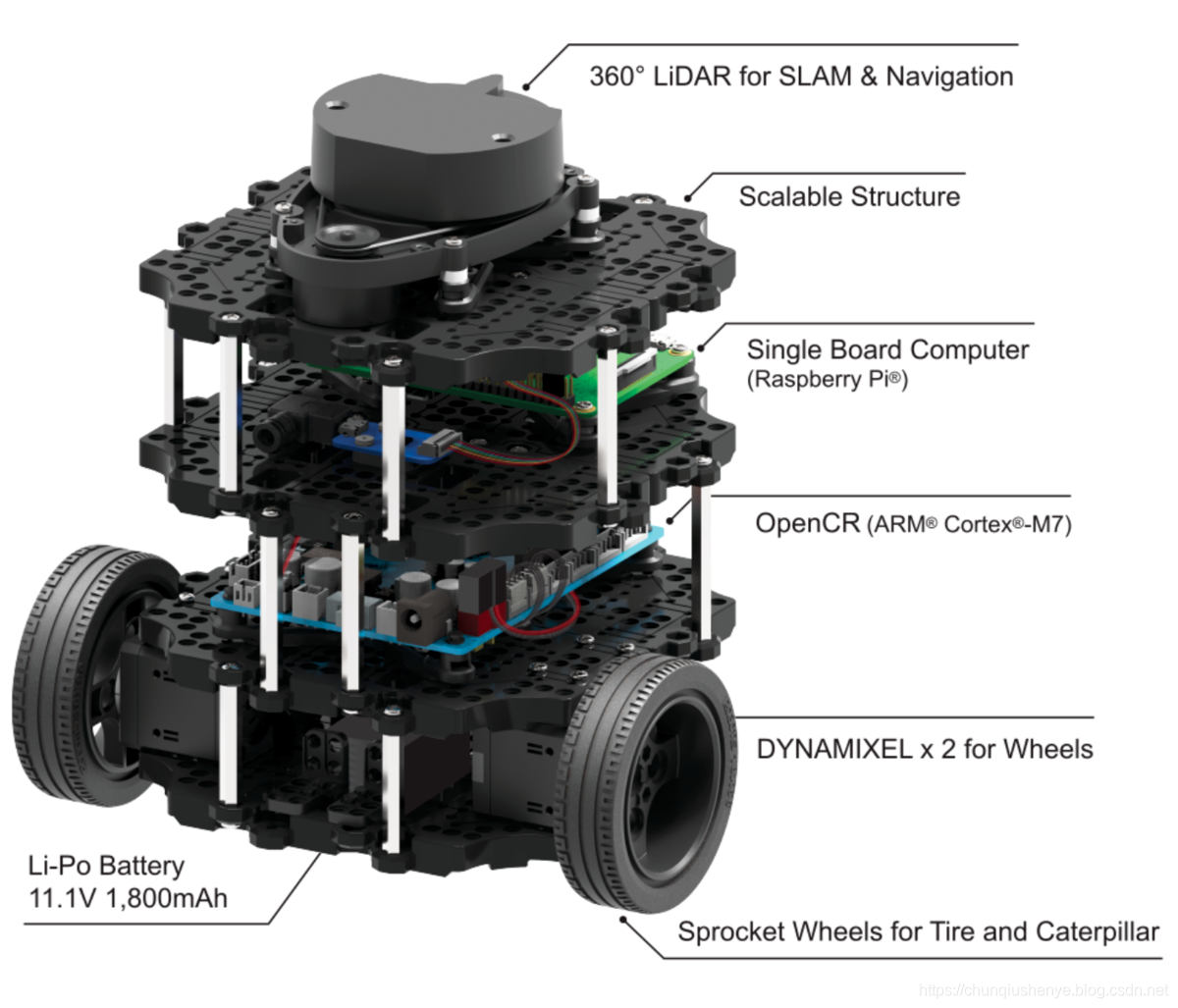
TurtleBot 3 Burger 使用Raspberry Pi 3开发板来跑ROS,
通过OpenCR主板控制底部的运动执行部分(两个带编码器的减速电机,差动),
顶部有一个激光雷达模块,用于导航。机体采用模块化,堆叠式的方式组合。
Raspberry Pi 3 中安装系统版本为:Ubuntu Mate
集成的 ROS版本为: Kinetic

Open CR 是TurtleBot3的主控制器板,STM32F7系列是主芯片&#

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 2317
2317

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











