







 本文介绍了2D-2D对极几何的公式重新推导过程,探讨了坐标变化公式Pc2=R×Pc1+t中的旋转和平移顺序,并解释了相机坐标系转换中旋转和平移的关系。通过对极几何的约束公式p2TK−Tt^RK−1p1=0的解析,阐述了本质矩阵E和基础矩阵F的计算,以及如何从匹配点求解R和t。
本文介绍了2D-2D对极几何的公式重新推导过程,探讨了坐标变化公式Pc2=R×Pc1+t中的旋转和平移顺序,并解释了相机坐标系转换中旋转和平移的关系。通过对极几何的约束公式p2TK−Tt^RK−1p1=0的解析,阐述了本质矩阵E和基础矩阵F的计算,以及如何从匹配点求解R和t。
今天跟着视觉SLAM十四讲 重新推导了一下2D-2D的对极几何公式,对坐标变化公式 P c 2 = R × P c 1 + t P_{c2}=R×P_{c1}+t Pc2=R×Pc1+t又有了新的认识
先放上参考链接:https://www.cnblogs.com/houkai/p/6661607.html
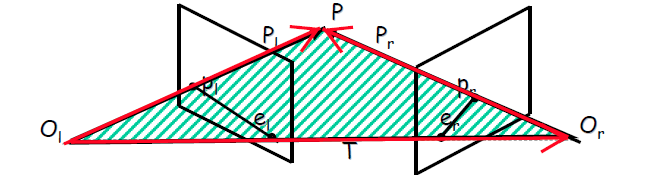
这里面到的这么一个关系: P c 2 = R ( P c 1 − T ) P_{c2}=R(P_{c1}-T) Pc2=R(Pc1−T)( T T T是两个相机光心之间的平移,注意此时是在 P c 1 P_{c1} Pc1
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









