







PnP(Perspective-n-Point)问题的几何结构如图1所示,给定3D点的坐标、对应2D点坐标以及内参矩阵,求解相机的位姿。
数学语言描述如下:
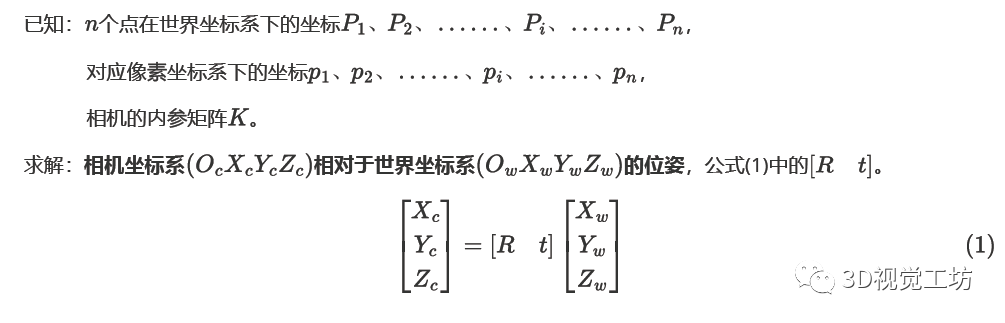
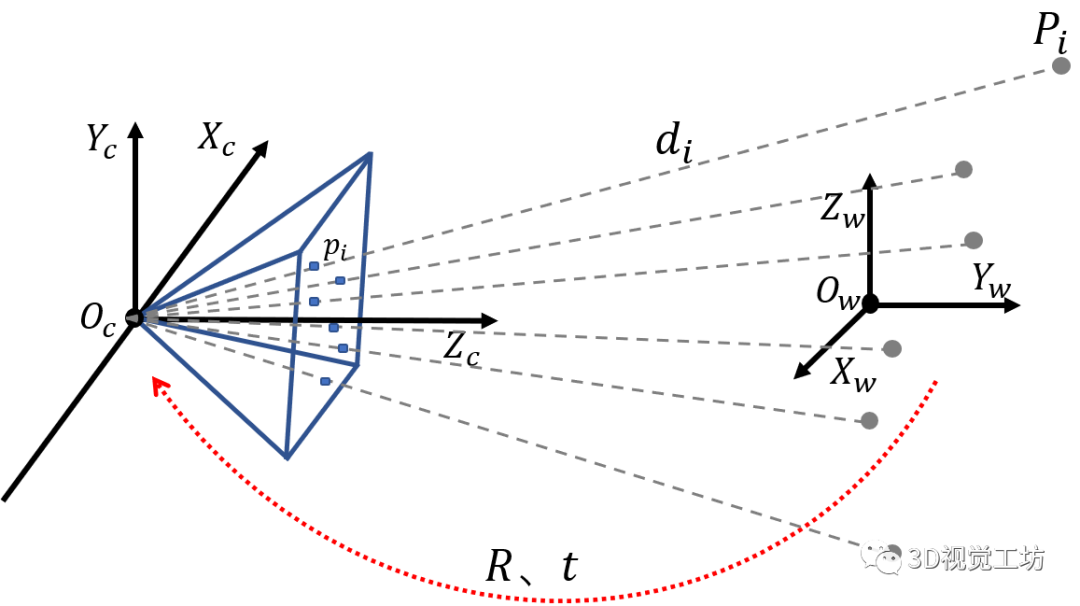
图1.PnP几何结构
1.直接线性变换法(Direct Linear Transform,DLT)
假设:摄像机已经校准过了。
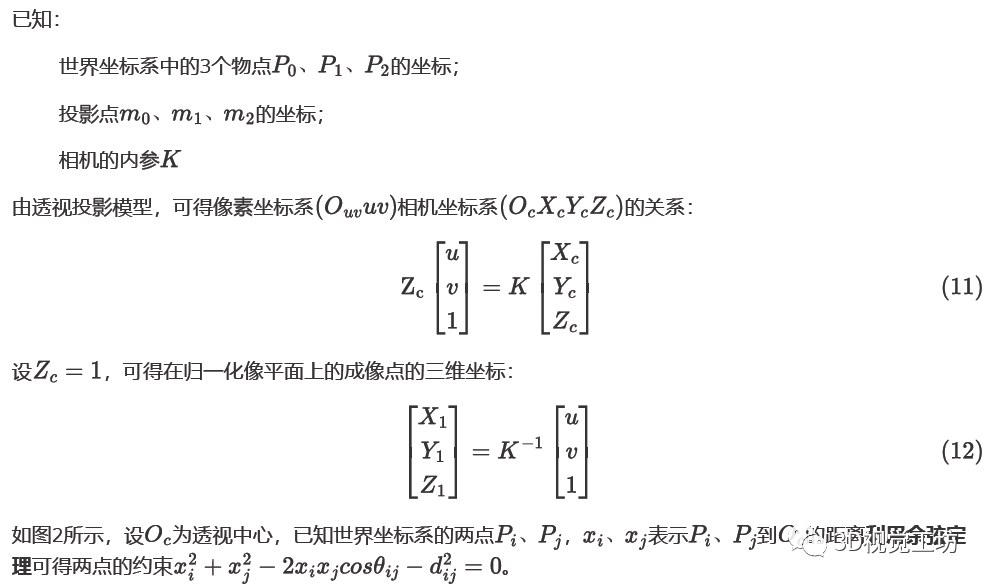
已知:

求解相机的外参:R、t
透视投影模型为:
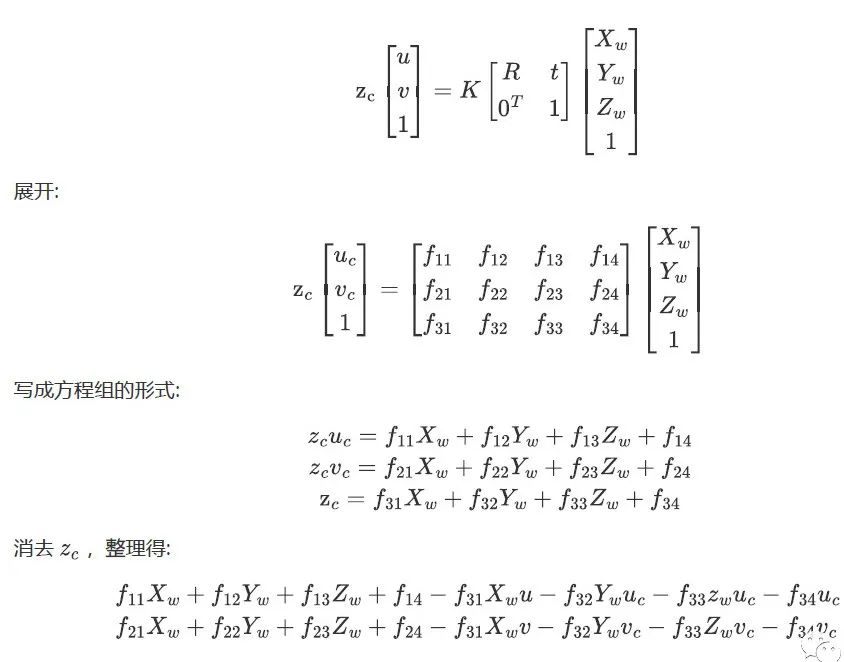
每组3D-2D匹配点对应两个方程,一共有12个未知数,至少需要6组匹配点。
设有N组匹配点,则:
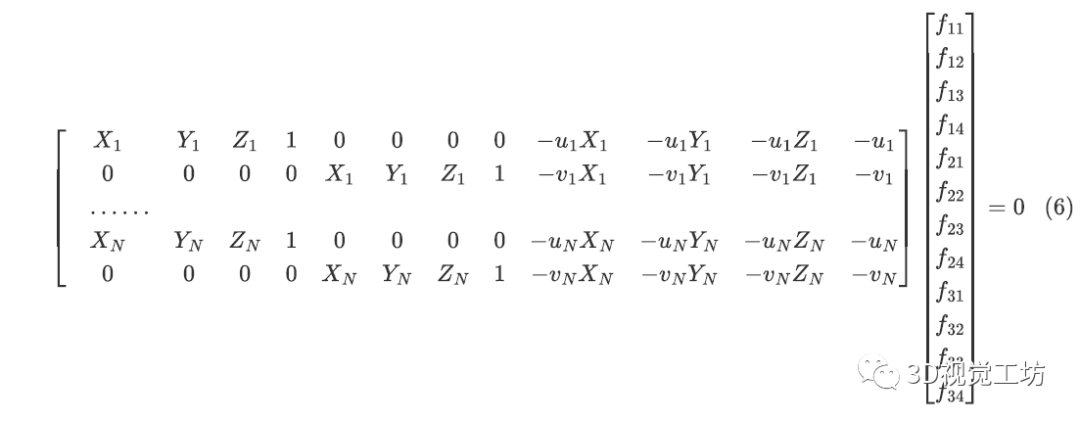
上式写成矩阵形式:
AF=0
当N=6时,可以直接求解线性方程组。

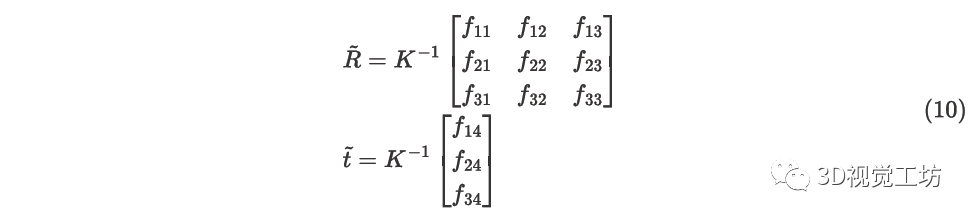
因此, 旋转矩阵, 平移矩阵求得:
2.P3P
P3P问题是已知三个3D目标点与其2D投影之间的对应关系,来确定标定相机的位姿问题。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 941
941











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









