







 本文探讨了2023年智驾领域中‘重感知轻地图’方案的发展趋势,分析了规划控制对地图定位的需求变化,指出SLAM技术在某些场景仍有长久需求,如多传感器标定、低速无GNSS定位和4DGT感知标注。同时,文章也关注了通用机器人领域的机会,表明智驾技术在通用机器人中的潜力。
本文探讨了2023年智驾领域中‘重感知轻地图’方案的发展趋势,分析了规划控制对地图定位的需求变化,指出SLAM技术在某些场景仍有长久需求,如多传感器标定、低速无GNSS定位和4DGT感知标注。同时,文章也关注了通用机器人领域的机会,表明智驾技术在通用机器人中的潜力。
2023年智驾领域的热门话题是“重感知,轻地图”方案,也称“无图”方案(无图指不依赖离线高精地图),这种方案降低了对传统离线建图和在线高精定位技术的需求,让包括我自己在内的很多SLAM技术从业者担心自己要被“卷没了”,对智驾的技术发展是否仍然长期需要SLAM技术产生了疑惑。本文是对这个问题的调研和思考。
一 从智驾系统框架说起
智驾系统分为规划控制,地图定位和实时感知三个核心模块,其中感知提供实时车辆周围的动静态信息,为规划控制的行为决策和执行动作的推演提供局部环境的实时约束。如果只是让车辆在局部空间内自主移动,并假设在线感知能力足够强,是不需要地图定位模块的,但是在智驾系统目前经典的技术栈中,定位和建图却是非常重要的一环。理解清楚规划控制对地图定位的需求,是分析重感知轻地图下SLAM技术需求的“变”与“不变”的一把钥匙。
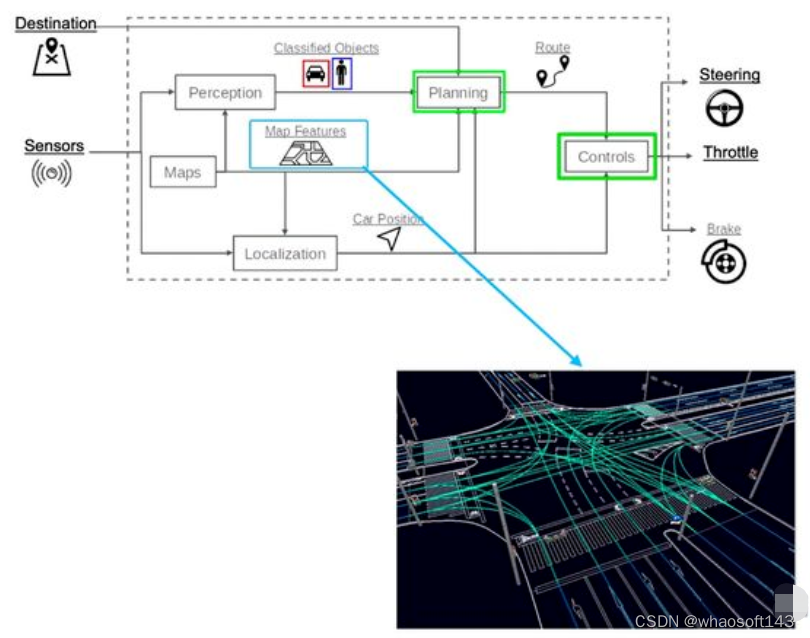 智驾系统框架[1]
智驾系统框架[1]
二 规控对地图和定位的需求
按照规划控制经典的子模块划分,本质上可以理解为一个仿生系统,它类比了人类开车的整个的行为过程。一个典型的驾驶行为如下:
-
早上你要开车去公司上班,上车之后的第一个动作是呼叫车载语音助手导航到xxx公司,语音助手唤起车载的高德地图,提供一条或者多条导航路线显示给你做选择。(全局路径规划)
-
当你沿着导航路线朝着公司方向行进时,语音助手提示你前方路口需要左转,你发现前方只有最左侧车道是可以左转的,并且左侧前方有车,同时前方路口时红灯,你决定提前变换到左侧车道,并控制油门和前车保持一定距离,在路口提前决定刹车以等待红绿灯,当左转绿灯亮起,你知道可以左转了。这里的变道,跟车,左转在规划控制中被定义为行为决策
-
在上述变道的切换中,你无意识地朝向左侧车道前方某个大概位置,根据自车和那个大概位置的距离和方位,不断地调整油门和左打方向盘的角度,完成变道的决策。画出一条丝滑的切换轨迹。在这个过程中,我们的大脑其实假象了一条从当前自车位置到左侧目标位置的一条局部轨迹,并不断的动态调整车辆位置让其沿着这条局部轨迹驶向目标点。在规控中,将一条局部轨迹的跟踪问题定义为局部规划或者运动规划模块。局部规划模块给出一系列动作期望的油门,转向等控制指令,运动控制器则负责实施期望的油门和转向等指令。
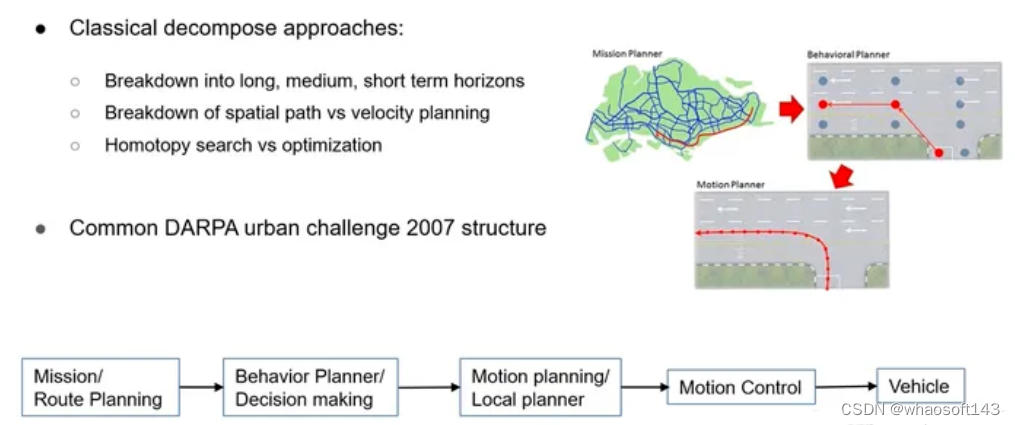 规控系统框架[1]
规控系统框架[1]
为了实现上述过程的自动驾驶,产生了规划控制模块对地图定位的需求。其中,全局路径规划仅需要规格稍低的SD地图(即高德地图等手机导航级别的地图)和米级精度的全局定位,以实现从起点(由全局定位模块提供)到终点(在SD地图里指定)的全局路径规划。对于行为决策和局部规划模块,需要局部环境更为丰富和精确的道路信息,比如道路的拓扑结构,停止线,道路曲率等。如果感知能力足够强,是可以直接在线提供这些信息,但是早期感知能力有限时,则通过额外高精度设备离线采集环境数据,离线计算并保存这些信息的方式提供,即离线高精地图(HDMap)。
规控对离线高精地图的使用,产生了对高精地图定位的需求,即矢量地图定位。高精地图构建了一个由各种道路元素组成的虚拟世界,规控其实是在这个虚拟的世界进行决策控制。而矢量地图定位是实现虚拟地图世界和真实世界的映射,以保证规控在地图上的行为动作结果和实际世界一一对应。具体来说,矢量地图定位通过感知提供的单帧语义矢量(真实世界)如车道线,路灯杆等,结合GNSS组合导航提供的定位初值,和离线高精地图中的对应语义矢量进行匹配。由此可见,离线高精地图和矢量定位是一对锁和钥匙,两者依赖对方的存在才有意义。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 67
67

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









