







一、安装步骤
1、sudo apt update && sudo apt install curl gnupg lsb-release
2、wget https://raw.githubusercontent.com/ros/rosdistro/master/ros.key
这一步可能是失败,原因是拒绝连接;
根据刚刚拒绝连接的ip地址,在/etc/hosts文件中加入下面一行:
185.199.109.133 raw.githubusercontent.com
185.199.109.133为刚刚的ip地址
重新执行 wget https://raw.githubusercontent.com/ros/rosdistro/master/ros.key
可能会失败,多执行几次,ip是美国那边的,所以访问会不稳定;
将ros.key改名为ros-archive-keyring.gpg
3、 echo “deb [arch=$(dpkg --print-architecture) signed-by=/home/zhi/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main” | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
加粗是个人的实际路径,自行更改;
4、sudo apt update
5、 sudo apt install ros-galactic-desktop
6、 sudo apt install -y python3-rosdep
7、 sudo rosdep init
8、 rosdep update
这一步和下一步的成功操作可以参考:https://blog.csdn.net/Kenny_GuanHua/article/details/116845781 只使用里面的“2021最新解决方法”部分。
9、 rosdep install --from-paths /opt/ros/galactic/share --ignore-src --rosdistro galactic -y --skip-keys “console_bridge fastcdr fastrtps osrf_testing_tools_cpp poco_vendor rmw_connextdds rti-connext-dds-5.3.1 tinyxml_vendor tinyxml2_vendor urdfdom urdfdom_headers”
这一步是失败的(对执行例子没影响,不知道对导航算法有没有影响),可能要翻墙会稳定一点
10、 sudo apt install -y libpython3-dev python3-pip
11、 sudo apt install python3-argcomplete
12、sudo apt install python3-colcon-common-extensions
13、sudo apt-get install ros-galactic-turtlebot3-simulations 这个可以不安装,调试可能会用到
到这里就安装完成。
环境变量设置
1、 echo “source /opt/ros/galactic/setup.bash” >> ~/.bashrc
2、 source ~/.bashrc
二、检验安装成功
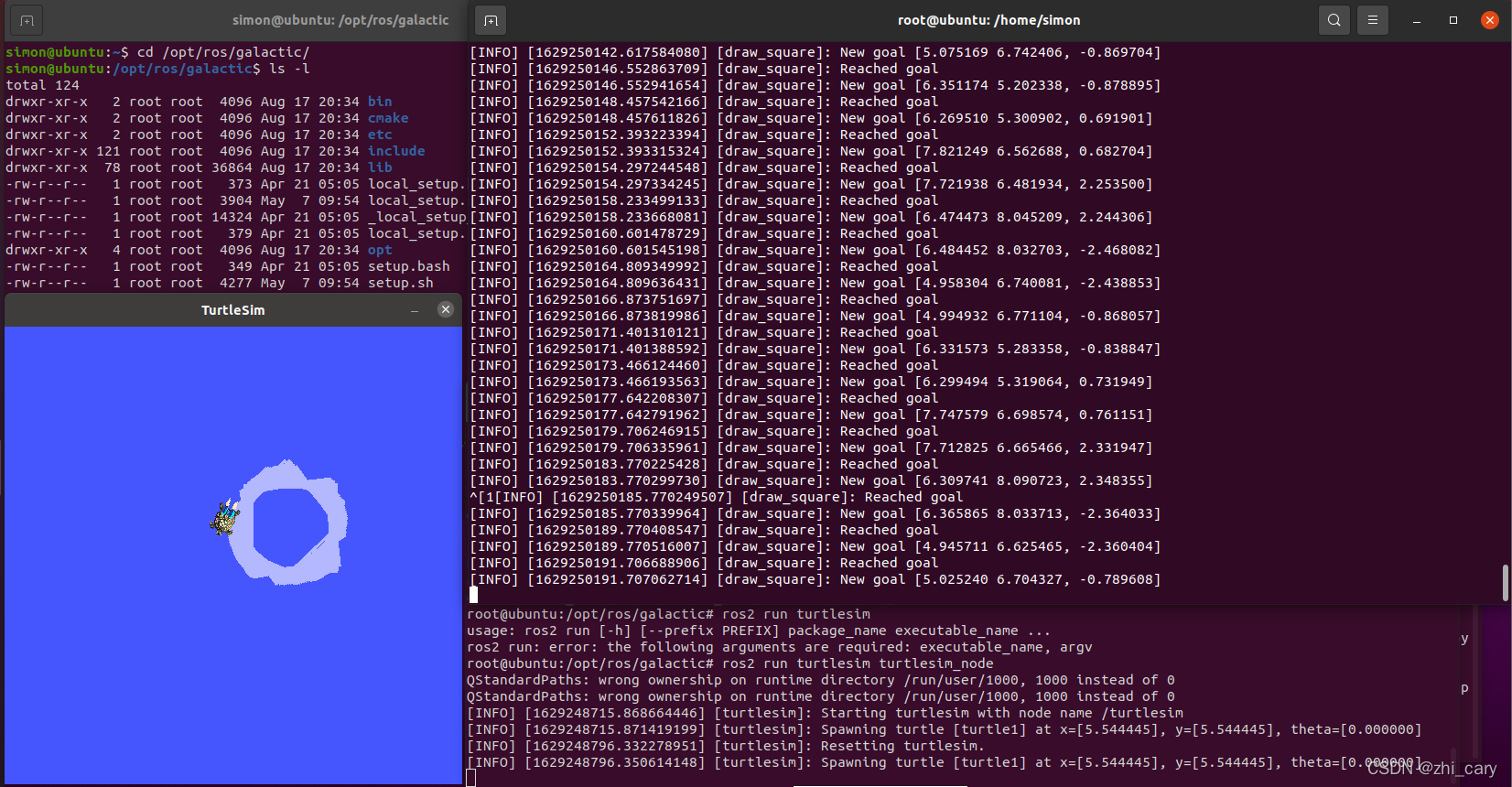
1、安装路径检查:ls -l /opt/ros/galactic/
2、让小龟跑起来:
ros2 run turtlesim turtlesim_node
ros2 run turtlesim draw_square

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









