







Ceres Solver 非线性优化库
1. Ceres Solver
Ceres solver 是谷歌开发的一款用于非线性优化的库
在 谷歌的开源激光雷达SLAM项目Cartographer 中被大量使用
使用Ceres求解非线性优化问题,一共分为四个部分:
- 构建 代价函数cost fuction,也就是寻优的目标式
- 通过代价函数构建 待求解的优化问题
- 配置求解器参数
- 求解问题
Ceres主要用于求解无约束或者有界约束的最小二乘问题
这个概念可以用以下表达式表示:
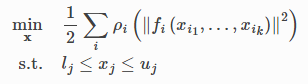
任务就是找到一组满足约束
l
l
lj
≤
x
≤x
≤xj
≤
u
≤u
≤uj的
x
x
x1,⋯,
x
x
xk, 使得优化目标函数取值最小
- x x x1,⋯, x x xk 优化参数,被称为参数块,它们的取值就是寻找的解
- l l lj, u u uj 第 j j j个优化参数 x x xj的下界和上界
-
ρ
ρ
ρi
(
∥
f
(∥f
(∥fi
(
x
(x
(x1,⋯,
x
x
xk
)
∥
)∥
)∥2
)
)
) 残差项,其中
f
f
fi
(
⋅
)
(⋅)
(⋅)是代价函数,
ρ
ρ
ρi
(
⋅
)
(⋅)
(⋅)则是关于代价函数平方的核函数
核函数存在的意义主要是为了降低野点对于解的影响
2. 下载安装
使用以下命令安装依赖
sudo apt-get install cmake libgoogle-glog-dev libgflags-dev libatlas-base-dev libeigen3-dev libsuitesparse-dev
下载源码,推荐用国内源
git clone https://gitcode.net/mirrors/ceres-solver/ceres-solver.git
开始编译
mkdir ceres-bin
cd ceres-bin/
cmake ../ceres-solver
make -j3
sudo make install
测试一下
bin/simple_bundle_adjuster ../ceres-solver-2.0.0/data/problem-16-22106-pre.txt

3. 简易例程
Ceres官网教程给出的例程中,求解的问题是求 x x x使得 1 2 \frac{1}{2} 21 ∗ ( 10 − x ) * (10−x) ∗(10−x)2 取到最小值
代码如下:
#include <iostream>
#include <ceres/ceres.h>
using namespace std;
using namespace ceres;
/* 第一步:构建代价函数,利用仿函数对()进行重载 */
struct CostFunctor
{
template <typename T>
bool operator()(const T *const x, T *residual) const
{
residual[0] = T(10.0) - x[0];
return true;
}
};
/* 主函数 */
int main(int argc, char **argv)
{
google::InitGoogleLogging(argv[0]);
/* 寻优参数x的初始值,为5.0 */
double initial_x = 5.0;
double x = initial_x;
/* 第二步:构建寻优问题 */
Problem problem;
/* 使用自动求导,将之前的代价函数结构体传入,第一个1是输出维度,即残差的维度,第二个1是输入维度,即待寻优参数x的维度。 */
CostFunction *cost_function = new AutoDiffCostFunction<CostFunctor, 1, 1>(new CostFunctor);
/* 向问题中添加误差项,本问题比较简单,添加一个就行。 */
problem.AddResidualBlock(cost_function, NULL, &x);
/* 第三步:配置求解器 */
Solver::Options options;
options.linear_solver_type = ceres::DENSE_QR; /* 配置增量方程的解法 */
options.minimizer_progress_to_stdout = true; /* 配置输出到cout */
Solver::Summary summary; /* 定义优化信息 */
/* 第四步:运行求解器 */
Solve(options, &problem, &summary);
/* 输出优化的简要信息 */
std::cout << summary.BriefReport() << "\n";
/* 输出最终的结果信息 */
std::cout << "x : " << initial_x << " -> " << x << "\n";
return 0;
}
4. 环境运行
在与源码和编译文件夹同级路径再新增测试文件夹ceres-examples:
$ mkdir ceres-examples
$ ls
# ceres-bin ceres-examples ceres-solver
$ cd ceres-examples
文件以example.cpp为例,新建文件复制上述代码
再新建CMakeLists.txt文件
cmake_minimum_required(VERSION 2.8)
project(ceres-examples)
find_package(Ceres REQUIRED)
include_directories(${CERES_INCLUDE_DIRS})
add_executable(example example.cpp)
target_link_libraries(example ${CERES_LIBRARIES})
然后编译并执行文件
$ cmake ../ceres-examples/
$ make
$ ./example

最终解为10使得
1
2
\frac{1}{2}
21
∗
(
10
−
x
)
* (10−x)
∗(10−x)2 取到最小值
5. 非线性拟合
拟合非线性函数的曲线: y = e y=e y=e3x2+2x+1
#include <iostream>
#include <ceres/ceres.h>
#include <time.h>
using namespace std;
using namespace ceres;
/* 构建代价函数结构体,abc为待优化参数,residual为残差。*/
struct CostFunctor
{
CostFunctor(double x, double y) : _x(x), _y(y) {}
template <typename T>
bool operator()(const T *const abc, T *residual) const
{
residual[0] = _y - exp(abc[0] * _x * _x + abc[1] * _x + abc[2]);
return true;
}
const double _x, _y;
};
/* 主函数 */
int main()
{
/* 参数初始化设置,abc初始化为0,噪声 */
double a = 3, b = 2, c = 1;
double abc[3] = {0, 0, 0};
/* 设置rand()产生随机数时的随机数种子 */
srand((int)time(0));
/* 生成待拟合曲线的数据散点 */
vector<double> x_data, y_data;
for (int i = 0; i < 1000; i++)
{
double x = i / 1000.0;
x_data.push_back(x);
y_data.push_back(exp(a * x * x + b * x + c) + (rand() % 11 - 5) / 10.0);
}
/* 第二步:构建寻优问题 */
Problem problem;
/* 遍历所有数据点,添加AddResidualBlock */
for (int i = 0; i < 1000; i++)
{
problem.AddResidualBlock(
new AutoDiffCostFunction<CostFunctor, 1, 3>(new CostFunctor(x_data[i], y_data[i])),
nullptr, /* 不使用核函数 */
abc); /* 待优化参数 */
}
/* 第三步:配置求解器 */
Solver::Options options;
options.linear_solver_type = DENSE_QR;
options.minimizer_progress_to_stdout = true;
Solver::Summary summary;
/* 第四步:运行求解器 */
Solve(options, &problem, &summary);
/* 输出最终的结果信息 */
cout << "a= " << abc[0] << endl;
cout << "b= " << abc[1] << endl;
cout << "c= " << abc[2] << endl;
return 0;
}
参考上节编辑文件和编译,执行效果如下:

求出来和原始参数很接近
谢谢!
















 4822
4822











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











