







//====================现控来进行闭环的原理=========================//
给定一个定常线性系统 (A,B,C)(见线性系统理论),则在采用反馈增益矩阵 K(即比例环节)实现状态反馈后,闭环系统就变成为(A-BK,B,C)。
一级倒立摆的Simulink仿真 现在这个阶段,仿真就够实践的了。
//==================================================
LQR算法就是现代控制原理的应用。
真正的控制应该是建模,根据模型设置控制器,整定控制器参数,深感自己在这方面的功底还有很大提升空间。
//====================LQR算法=================//
//====================================//
//==================自控现控框架===================//
《自控原理》主要是在《常微分方程》和《复变函数》和《最优化》框架下研究控制系统,
《现代控制理论》是在《常微分方程》和《矩阵论》和《最优化》框架下研究控制系统。
《常微分方程》里主要涉及稳定性问题
《复变函数》和《矩阵论》主要涉及控制系统的描述问题,《复变函数》好说,《矩阵论》反传统思维,要将数学形式和实际控制问题的描述结合在一起有些难,单纯《矩阵论》一般不会指明实际问题的描述。
《最优化》主要涉及控制方法的问题,这里的最优化不是一本书,是一类问题,一个大方向,题主所说的书里,主要涉及《凸优化》这本书。
《常微分方程》、《复变函数》、《矩阵论》、《凸优化》先看,后面《自控原理》、《现代控制原理》基本是拉出来结合,一看就明白了。
就本硕的经验而言,一般控制问题,就是《复变函数》或《矩阵论》描述系统,然后找个依据《常微分方程》和《最优化》设计出来的控制方法就解决了,剩下的,多半系统不好直接描述或直接控制达不到要求,需要依据《概率与统计》的方法重新探讨,基本不在这两本书范围之内了。
作者:初学
链接:https://www.zhihu.com/question/55108426/answer/620509958
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
//=============================================//
//================自动控制原理Bode图==============================//
Bode图描述的是被控对象的特性,用开环特性看闭环特性。(开环:信号经过被控对象;闭环:信号经过被控对象后来一个单位反馈。注意只用单位反馈。)
低频段:反应稳态性能。因为给定输入信号稳定后,不再变化,频率很低,属于低频信号。
高频段:反应系统的抗干扰性能。因为噪声一般都是高频信号。
相角裕度:看bode图幅频响应 0dB处,对应的相频响应的相角裕度。
因为幅频响应0dB处,被控对象对输入信号的幅值增益为1,相当于加入单位反馈后的闭环系统的前向通道增益为1。
当bode图相频响应为-180°时,就变成了单位正反馈。所以0dB处相频响应的应该离-180°越远越好。
(正弦信号相角改变180°,就相当于添负号,再通过负反馈就变成了正反馈)
bode图
串联校正:增加一个串联环节,改变bode图,相当于改变被控对象的系统特性。(反馈都是用单位反馈,反馈的环节并不改变)
//====================现控========================================//
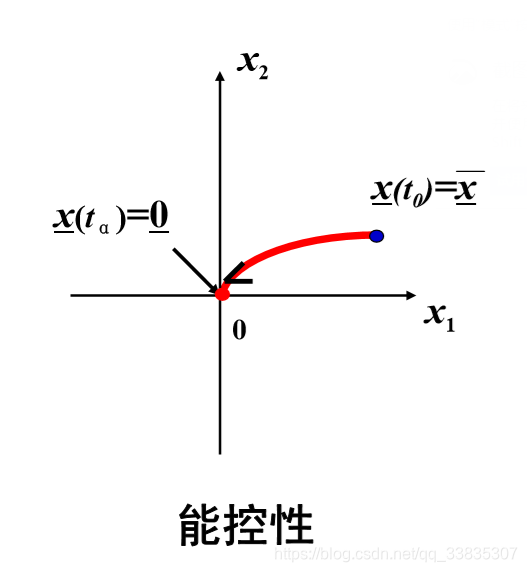
x1、x2是系统的状态变量,x(t0)是其中一个状态,x(ta)也是其中一个状态。
对于所有的状态(平面上所有的点),都能控回原点,该系统才是“完全可控的”。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









