









3D 基础:欧拉角、四元数、旋转矩阵、轴角
Introduction
关于各种数据表示格式的学习总结。
基础知识
欧拉角与旋转矩阵
欧拉角转换旋转矩阵
欧拉角旋转序列(Euler Angle Rotational Sequence)一共有12种顺规,6种绕三条轴的旋转(也叫Tait-Bryan Angle,XYZ,XZY,YXZ,YZX,ZXY,ZYX),另外6种只绕两条轴的旋转(也叫Proper Euler Angle,XYX,YXY,XZX,ZXZ,YZY,ZYZ)。如果相邻两次旋转是绕同一条轴,例如XXY,那么其实可以坍缩成XY。那么只绕一条轴旋转就根本不够自由度就不需要说了。也就是说,一共有12种基础旋转的组合顺序,它们可以旋转出三维的所有旋转状态。所以一共是12种旋转顺规(可以表示所有旋转的集合),DirectXMath库采用的是ZXY顺规,分别对应着Z-Roll,X-Pitch,Y-Yaw。

欧拉角构造旋转矩阵就直接把三个Elemental Rotation Matrix乘在一起就好。
根据不同的转换顺序,可以计算出不同的公式。
https://en.wikipedia.org/wiki/Euler_angles 中给出了12种旋转顺序的公式。
万向锁
万向锁现象是欧拉角表征姿态的一个固有缺陷。
ZYX顺序旋转过程中,如果Y旋转是正负90度时,Y的旋转轴就变成了Z轴,相当于失去了一个自由度。
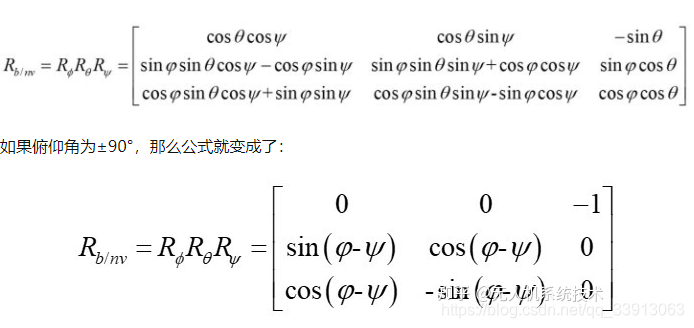
无论你怎么改变φ和ψ,你的旋转轴一直是Z轴不变。 导致自由度的缺失。
要想改变φ和ψ有不同的效果,你只能是去改变θ的值,以上就是用数学方法来解释为什么俯仰角在±90°时欧拉角出现万向锁的过程。
同一种空间状态欧拉角的表示方式不唯一,当出现万向锁现象时,同一种旋转有无数种欧拉角表示形式。
万向锁现象是欧拉角表征姿态的一个固有缺陷,所以,在进行姿态解算时往往会优先使用四元数方法进行描述。
旋转矩阵转换成欧拉角
通过上面的公式,可以计算出欧拉角。
但是:出现万向锁时候,旋转矩阵公式中的元素会产生简化。我们无法确定一个转角的具体值。
ZYX Euler Angles (roll, pitch, yaw)
Reference:
https://www.ccs.neu.edu/home/rplatt/cs5335_fall2016/slides/euler_quaternions.pdf
四元数
四元数是由1个实数加上3个复数组合而成,通常可以表示成w+xi+yj+zk或者(w,(x,y,z))
为什么要用复数?
利用复数是为了把一个三维空间问题增加一个自由度,变成四维空间的问题。以下是一些重要的概念:
空间中的子空间:一般而言,空间(维度>2)都存在更低维的子空间,比如二维空间中一维子空间,也就是直线;三维空间中的一维子空间和二维子空间,也就是直线和面。高维空间中的平面我们称为超平面。
空间和子空间的映射:四维,(w,x,y,z),当w=0时,(0,x,y,z)就是一个三维子空间,这也是为什么我们可以用单位四元数对三维向量进行操作,其实我们是将三维向量映射到四维的三维子空间(w=0,这种形式也成纯四元数),然后对其进行旋转,最终得到的向量结果依然是这个三维子空间中的,因而可以映射回三维空间。
广义球:我们在二维平面上,广义球其实指代circle,三维空间上就是我们认知上的球,称为two-sphere,而四维空间中广义球其实是一个超球(hyper-sphere),又称为three-sphere。单位向量其实就是广义球上面的点,而单位四元数也就是three-sphere上面的点。
约束与特征向量:对于空间的点加以约束,则该会减少参数的数量,比如三维空间的点在某一单位球面上,原本三个参数{x, y, z}才能表达的点现在只需要两个参数{u, v}就可以表达。如果{u, v}是单位向量,也可以称{u, v}是{x, y, z}的特征向量。
四元数与旋转
下面会解释一下利用复数是怎么把四元数与旋转联系起来。
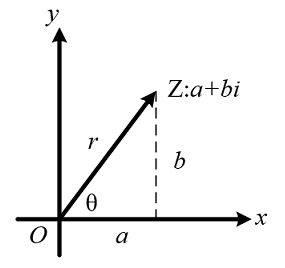
上面的向量可以表示一个旋转,通过转换成极坐标的形式,通过欧拉公式的转换,可以得到下面的结果。
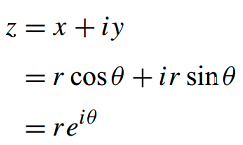
欧拉公式:
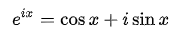
通过欧拉公式转换后的结果,可以转化为四元数。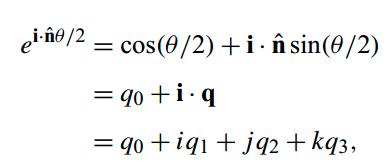
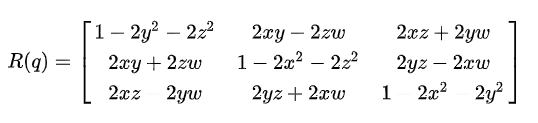
四元数转换成旋转矩阵
已知一个代表旋转的单位四元数
和一个被旋转的向量v:
- 构造一个纯四元数 p =(v,0),旋转之后变成p’ = (v’,0)
- p’ = q p q ^(-1)
计算之后获得公式
四元数理解
四元数自由度并没有四个维度,由于存在w²+x²+y²+z²=1这个约束,它的自由度其实只有3。
上面小结中的第一部构建了一个纯四元数:
纯四元数(Pure Quaternion),表示为{0, p},就是w=0的四元数。其实上回已经分析过这个空间了,处于四维空间中w=0的三维子空间。
所以四元数旋转的过程可以理解为,构建一个纯四元数之后,在纯四元数这个三维子空间中进行旋转,再转换成一个旋转后的纯四元数。
四元数乘法:
四元数乘法和复数的矩阵乘法其实是等价的。

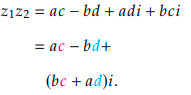
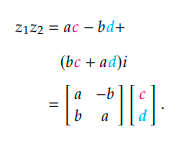
右边是z2的向量形式,左边是z1的矩阵形式。
p’ = q p q ^(-1) 解释
这个公式是四元数乘法的普适公式。
如果四元数中的w等于0, 旋转后的四元数仍然会在w=0下的三维空间。
w 不等于0,旋转后的四元数的w会变化,不会保持在同一个三维空间内。
这导致了旋转过程中的公式是不同的。
w 不等于0时,需要进行两次旋转,第一次旋转之后,w会变化,旋转之后处于不同的三维空间里面(q p)。第二次旋转之后,相当于转换回最初的w空间下的三维空间的坐标。这也是为什么乘上q ^(-1)的原因。
公式推导请见帖子:https://zhuanlan.zhihu.com/p/27541307
旋转矩阵转换成四元数
从旋转矩阵里提取四元数,也是可以像提取欧拉角那样,用参数化过的矩阵的表达式凑出来
四元数的优点
1.平滑插值:slerp和squad提供了方位间的平滑插值,没有其他方法能提供平滑插值。
2.快速连接和角位移求逆:四元数叉乘能将角位移序列转换为单个角位移,用矩阵做同样的操作明显会慢一些。
(四元数共轭提供了一种有效计算反角位移的方法,通过转置矩阵也能达到同样的目的,但不如四元数来得容易。)
3.(能和矩阵形式快速转换:四元数和矩阵的转换比欧拉角与矩阵之间的转换稍微快一些。)
4.(仅用四个数:四元数仅包含四个数,而矩阵用了9个数,它比矩阵“经济”得多(当然仍然比欧拉角多33%)。)
四元数缺点
1.比欧拉角空间稍微大一些。
2.四元数可能出现不合法现象:坏的输入数据或浮点数舍入误差累积都可能使四元数不合法(能通过四元数表转化解决这个问题,确保四元数为单位大小)。
3.难于使用。在所有三种方式中。四元数是最难于直接使用的。
四元数插值:球面(Slerp)插值
其实插值问题一直都算是图形学中比较经典的问题,一般来说线性插值可以满足大多数的情况,但是对于旋转来说,线性插值肯定效果不好,如下图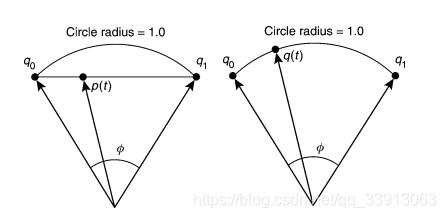
球面(Slerp)插值
球面插值的一般形式
主体思想其实就是施密特正交,先根据 q_a 和 q_b 解算出两个正交的四元数 q_0 和 q_1,然后通过加权算出最终的 q(t)。
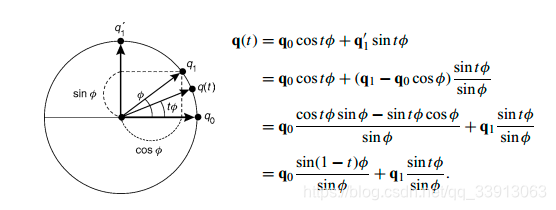
接下来会证明:上面的一般向量形式可以转换转换成下面的四元数相乘格式。
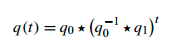
- 把下面的公式代入到上方的一般形式公式中。

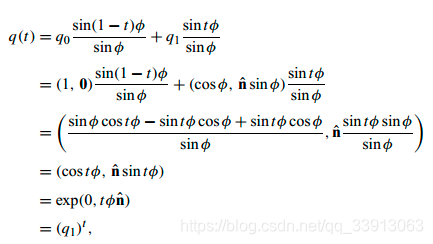
结果得到了q1^(t),证明了一般形式与四元数乘法结果是相通的。
(Reference: https://zhuanlan.zhihu.com/p/28189289)
四元数应用:顺序无关的旋转混合
Reference: https://zhuanlan.zhihu.com/p/28330428
需要解决的问题
我们知道旋转操作所构成的空间非线性,无法对旋转操作直接进行线性叠加。表示旋转的四元数也不能直接简单的线性叠加,并且旋转操作具有不可交换性,交换后结果不同。
近似解:
如果不要求那么高的精度而只是找个看起来凑合的近似解的话,扩展一下对于两个四元数的NLerp操作(Normalized Lerp),直接对多个四元数进行线性叠加然后Normalize一下,在这些四元数所代表的旋转差别不大的情况下,效果也还可以。
“精确”的混合
困难点
- 对这些四元数依次相乘肯定是不行的,因为四元数乘法顺序相关;
- 用SLerp只能针对两个四元数进行“精确”的混合(这里“精确”指的是角速度匀速的球面插值),但是SLerp没法扩展到多个四元数
方案:
方案的注意点:下面的方法只适用于additive pose,它的内容是个变化量(位移,旋转)而不是位置量(位置,朝向)。
通过把多个旋转中的每个旋转都划分成n多份,在每一步旋转过程中,都进行多个小旋转。
证明过程请看原帖子/ Linear Combination of Transformations 2002 siggraph的论文。
应用:用在动画中,计算多个动作变化的插值模拟。
这个方法是对于旋转的,对于朝向的是另外的方法:如何平均一堆四元数所表示的朝向。
轴角和四元数的关系
轴-角(Axis-Angle)顾名思义就是绕某条单位轴旋转一定角度,从这个意义上看,它构造四元数是非常舒服的,毕竟直观的几何意义有一点点类似,绕单位轴u旋转 theta 的四元数是

总结
欧拉角:非常直观,我们可以很容易理解它的意思,也能想象出对应的空间位置,但是存在万向锁现象,导致后面有很多数学问题。
旋转矩阵:旋转矩阵有9个元素,计算繁杂,尤其是求微分时,而且也不直观。
四元数:没有奇点,能表征任何旋转关系,而且表示简单,只有四个元素,计算量小,但是不直观
选择哪种?
1.欧拉角最容易使用。当需要为世界中的物体制定方位时,欧拉角能大大简化人机交互,包括直接的键盘输入方位,在代码中指定方位(如为渲染设定摄像机)、在调试中测试。这个优点不应被忽视,不要以“优化”为名义而牺牲易用性,除非您确定这种优化的确有效果。
2.如果需要在坐标系之间转换位置,那么就选择矩阵形式。当然这并不意味着您就不能用其它格式来保存方位,并在需要的时候转换到矩阵格式。另一种方法是用欧拉角作为方位“主拷贝”但同时维护一个旋转矩阵,当欧拉角发生改变时矩阵也要同时进行更新。
3.当需要**大量保存方位数据(如动画)**时,就使用欧拉角或四元数。欧拉角蒋少占25%的内存,但它在转换到矩阵时要稍微慢一些。如果动画数据需要嵌套坐标系之间的连接,四元数可能使最好的选择。
4.**平滑的插值只能用四元数完成。**如果您用其它格式,也可以先转换到四元数然后再插值,插值完毕后再转换回原来的形式。
Reference
1: https://zhuanlan.zhihu.com/p/45404840
2: https://zhuanlan.zhihu.com/p/79894982
3. https://zhuanlan.zhihu.com/p/27471300
4. https://krasjet.github.io/quaternion/quaternion.pdf
5. https://blog.csdn.net/pizi0475/article/details/6261667
6. https://www.ccs.neu.edu/home/rplatt/cs5335_fall2016/slides/euler_quaternions.pdf

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









