






卸载Ubuntu:https://blog.csdn.net/yeqiang19910412/article/details/79121581
删除Ubuntu EFI系统分区:https://blog.csdn.net/weixin_39750861/article/details/79829532
安装Ubuntu:https://blog.csdn.net/s717597589/article/details/79117112
阿里云源:

https://blog.csdn.net/areigninhell/article/details/79696751

安装Terminator
sudo apt-get install terminator
2 使用
打开Termintor按Ctrl-E(注意是大E要按住Shift)可以垂直分割终端 Ctrl-O 可水平分割终端 按住Alt然后按上下左右可以在不同的分割窗中切换 Ctrl-D 可以关闭分割窗
2.1 配置
terminator配置文件在~/.config/terminator/config 可以通过这个配置文件配置terminator的字体和颜色
安装OpenCV3.3.1:最好在较好的网络条件下安装,否则容易因为文件下载失败导致错误
https://blog.csdn.net/weixin_40494464/article/details/80135983
https://blog.csdn.net/zhangjun62/article/details/80476274
一、安装官方给的opencv依赖包
1、sudo apt-get update
2、sudo apt-get install build-essential
3、sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
4、sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg8-dev libpng12-dev libtiff5-dev libjasper-dev libdc1394-22-dev # 处理图像所需的包
5、sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev liblapacke-dev
6、sudo apt-get install libxvidcore-dev libx264-dev # 处理视频所需的包
7、sudo apt-get install libatlas-base-dev gfortran # 优化opencv功能
8、sudo apt-get install ffmpeg
9、sudo apt-get install libgtk-3-dev
10、sudo apt-get install libatlas-base-dev gfortran
11、sudo apt-get install python2.7-dev python3.5-dev
二、下载OpenCV源代码
12、wget https://github.com/opencv/opencv/archive/3.3.1.zip
wget https://github.com/opencv/opencv_contrib/archive/3.3.1.zip
三、配置编译OpenCV
首先在用户目录下创建存放源码的文件夹,将两个源码包解压后放入opencv目录下
13、mkdir ~/opencv
14、unzip opencv-3.3.1.zip
unzip opencv-3.3.1.zip.1
15、mv opencv-3.4.1 ~/opencv
mv opencv_contrib-3.4.1 ~/opencv
16、cd opencv 查看一下是否转移成功
17、 cd opencv-3.3.1
18、mkdir build
19、cd build
20、运行以下命令
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D INSTALL_PYTHON_EXAMPLES=ON -D INSTALL_C_EXAMPLES=ON -D OPENCV_EXTRA_MODULES_PATH=../../opencv_contrib-3.3.1/modules -D PYTHON_EXECUTABLE=/usr/bin/python3.5 -D BUILD_EXAMPLES=ON ..
其中 -D表示定义,其后是命令和参数,第一个是编译类型,源码是是release(release是比较稳定的版本,建议用这个版本),所以参数是RELEASE,第二个是安装路径,第三个和第四个是是否安装C与Python例子,第五个是扩展模块路径,第六个是python可执行程序路径,第七个是是否编译例子,最后那两个点不要去掉,表示上一级目录,而上一级目录是源码,所以一定不要去掉。注意其中的空格
21、sudo make -j8 采用多线程编译,但是这个出错多,如果出错,先运行make clean,然后运行sudo make,如果没有make命令,先执行sudo apt-get install make
22、sudo make install
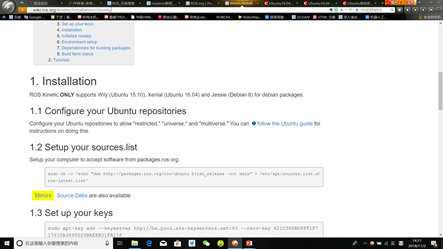
2、选择源,这里选择中科大的或者清华的

sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
3、设置密码
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
4、安装
1 sudo apt-get update 2 sudo apt-get install ros-kinetic-desktop-full ##全部安装
第二条指令执行出错时,先执行一次 sudo apt-get -f install

5、初始化
1 sudo rosdep init 2 rosdep update
6、配置环境
1 echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc 2 source ~/.bashrc
7、安装building package的依赖(Dependencies for building packages)
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
8、测试是否安装成功
在三个不同的终端中输入
1 roscore
3 rosrun turtlesim turtlesim_node
5 rosrun turtlesim turtle_teleop_key
安裝RoboWare:WWW.RoboWare.me
https://blog.csdn.net/lixujie666/article/details/80139112 














 2338
2338

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









