







MATLAB学习笔记系列第五篇了,这一篇重点讲一下pid tunner的使用。上一篇讲的是控制系统,MathWorks官方MATLAB/Simulink基础入门视频教程 笔记(控制系统) 那个课程到上一篇就已经完结了,这一篇主要是实际使用过程中的情况。
matlab学习笔记(五)
MATLAB/simulink中PID Tuner工具箱
简介
用于simulink中调PI参数的工具。
在使用PID Tuner的时候,它会自动做一些工作:
自动计算被控装置的线性模型。PID Tuner会将PID控制块输入和输出之 间所有Simulink块的组合看作为一个被控装置,因此被控装置将会包括控制环中所有块体,不仅仅是控制器本身。
自动给出一个经过控制性能和鲁棒性(健壮性)平衡的初始PID控制设计。这个过程基于经过线性化的被控装置模型的开环频率响应特性。
提供交互性工具和响应曲线来帮助设计满足要求的PID控制系统。
模块的使用
可以在MATLAB app里找到,或者直接在pid controller里直接使用。
下面以一个自带的demo说明一下。
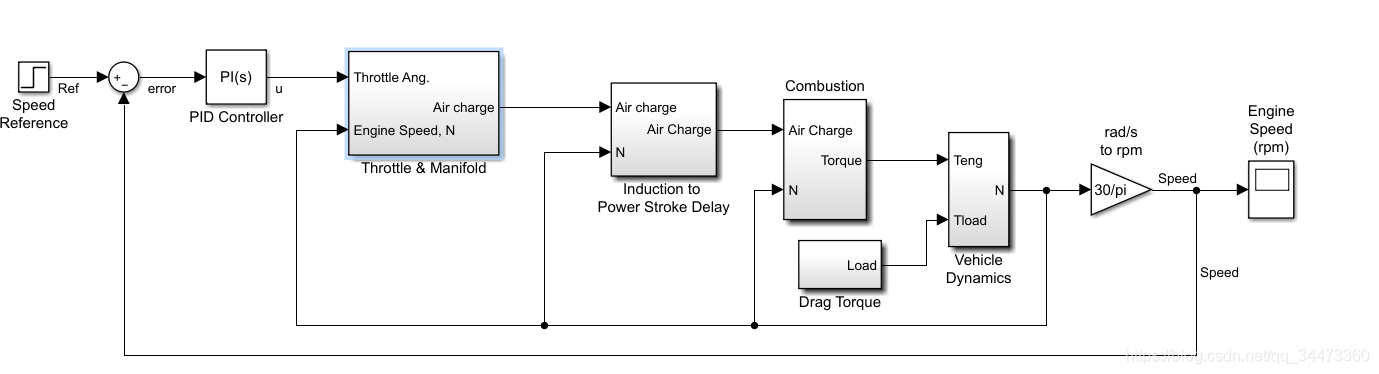
打开pid controller 点击tune

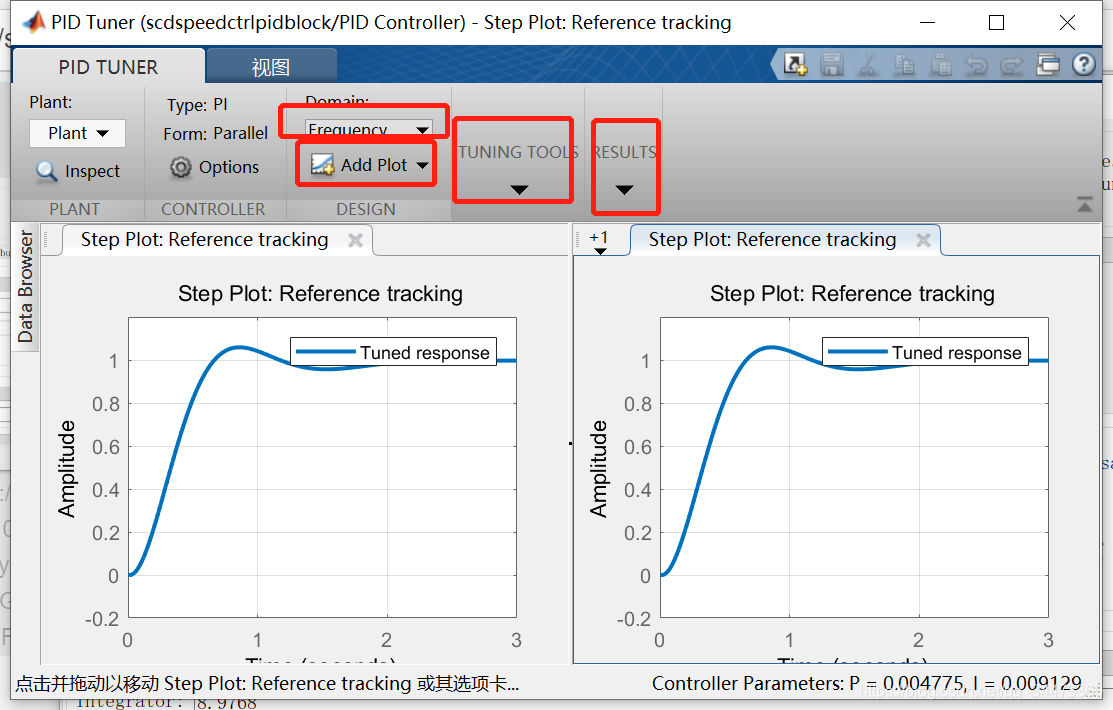
基本操作
可以用频域调节,也可以用时域调节。
根据修改带宽和相位裕度,来修改pi参数;
可以根据开环bode图或者阶跃响应判断系统是否稳定。
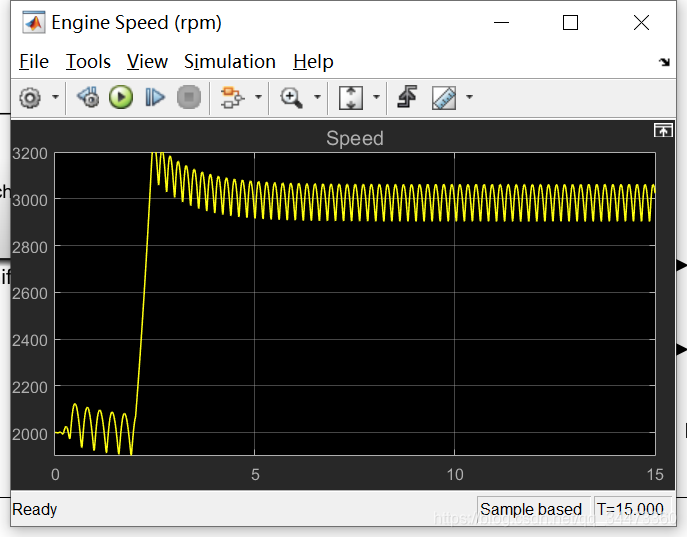
调参之前:
调参之后:
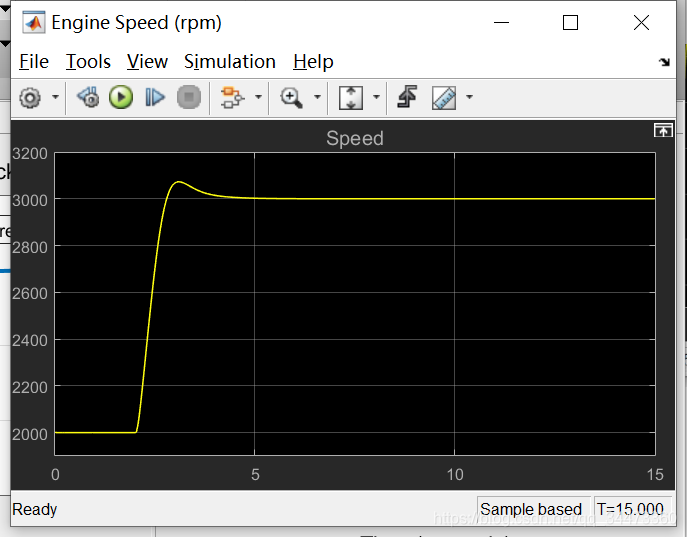
可以看到,明显改善。
打开该模型的命令是:
open_system('scdspeedctrlpidblock')

















 1792
1792

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









