







 本文探讨了常见的时钟树结构,包括H Tree、Multi Point CTS (Multi Source CTS) 和 Clock Mesh。Multi Source CTS在时钟网络优化中展现出优势,因其共享公共路径特性。Clock Mesh结构提供了更好的路径共享。此外,文章还介绍了新概念的Flexible H-Tree,详细解析了其在Cadence用户大会上的介绍。
本文探讨了常见的时钟树结构,包括H Tree、Multi Point CTS (Multi Source CTS) 和 Clock Mesh。Multi Source CTS在时钟网络优化中展现出优势,因其共享公共路径特性。Clock Mesh结构提供了更好的路径共享。此外,文章还介绍了新概念的Flexible H-Tree,详细解析了其在Cadence用户大会上的介绍。
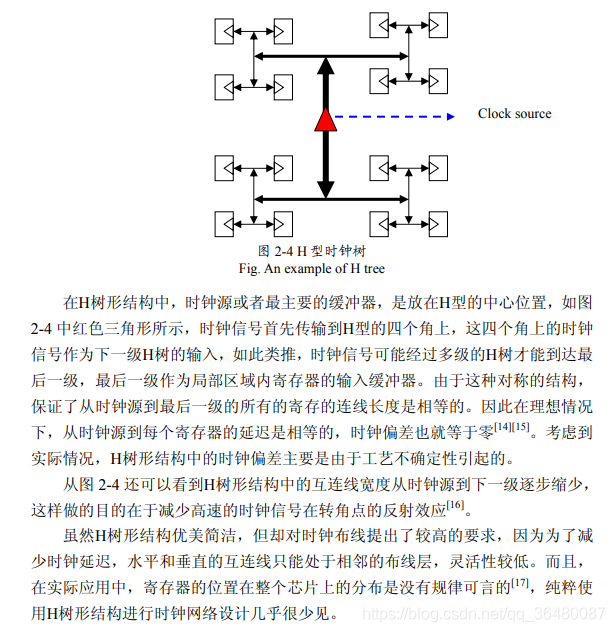
H tree
Multi Point CTS / Multi Source CTS
Analysis of Clock trees for optimization through Multi point Clock Tree Synthesis
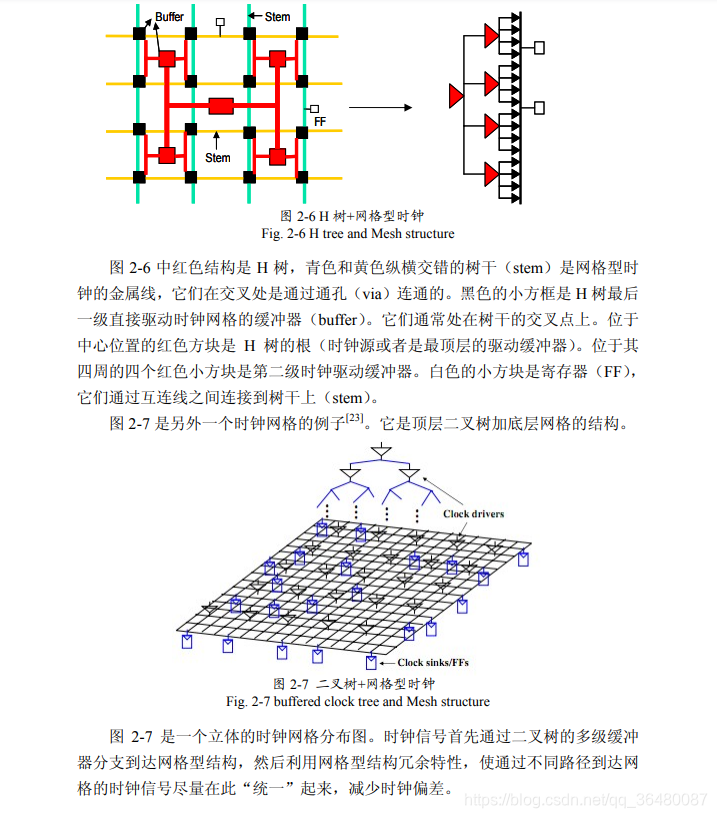
Clock Mesh
参考:
全芯片时钟网络的综合与优化方法
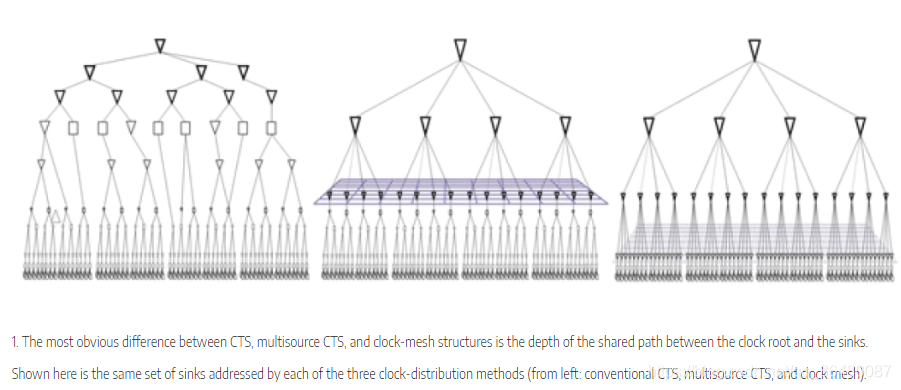
几种结构的关系和区别
个人理解:对于Multisource CTS
Analysis of Clock trees for optimization through Multi point Clock Tree Synthesis
参考:
全芯片时钟网络的综合与优化方法
个人理解:对于Multisource CTS
 941
2733
5044
941
2733
5044

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























