







 超级会员免费看
超级会员免费看
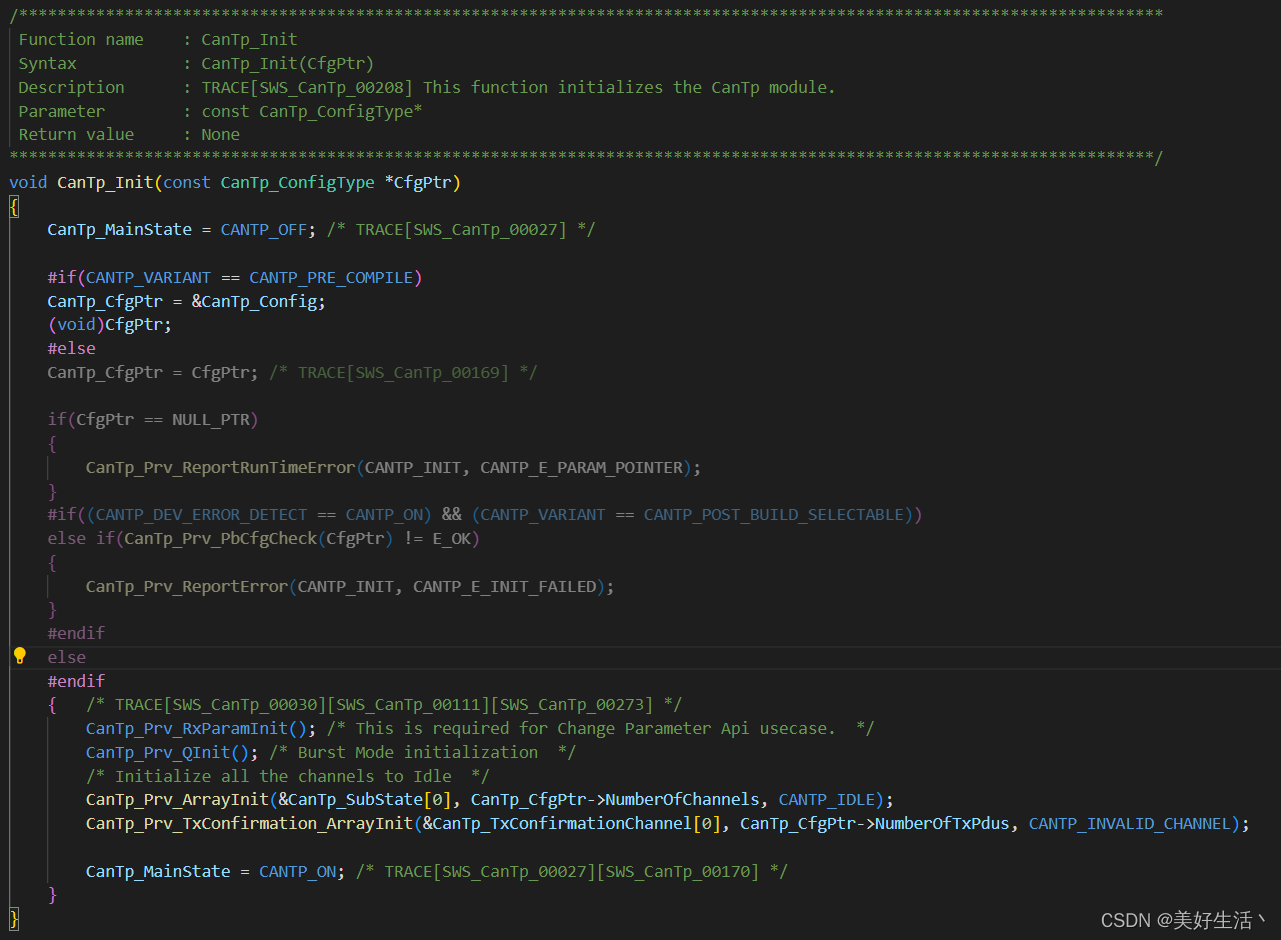
一、void CanTp_Init(const CanTp_ConfigType *CfgPtr)
This function initializes the CanTp module.
1、初始化CanTp_CfgPtr=CanTp_Config,具体结构类型在后面解释。
2、将CanTp_SubState初始化为CANTP_IDLE状态
3、将CanTp_TxConfirmationChannel初始化为CANTP_INVALID_CHANNEL
4、设置CanTp_MainState为CANTP_ON
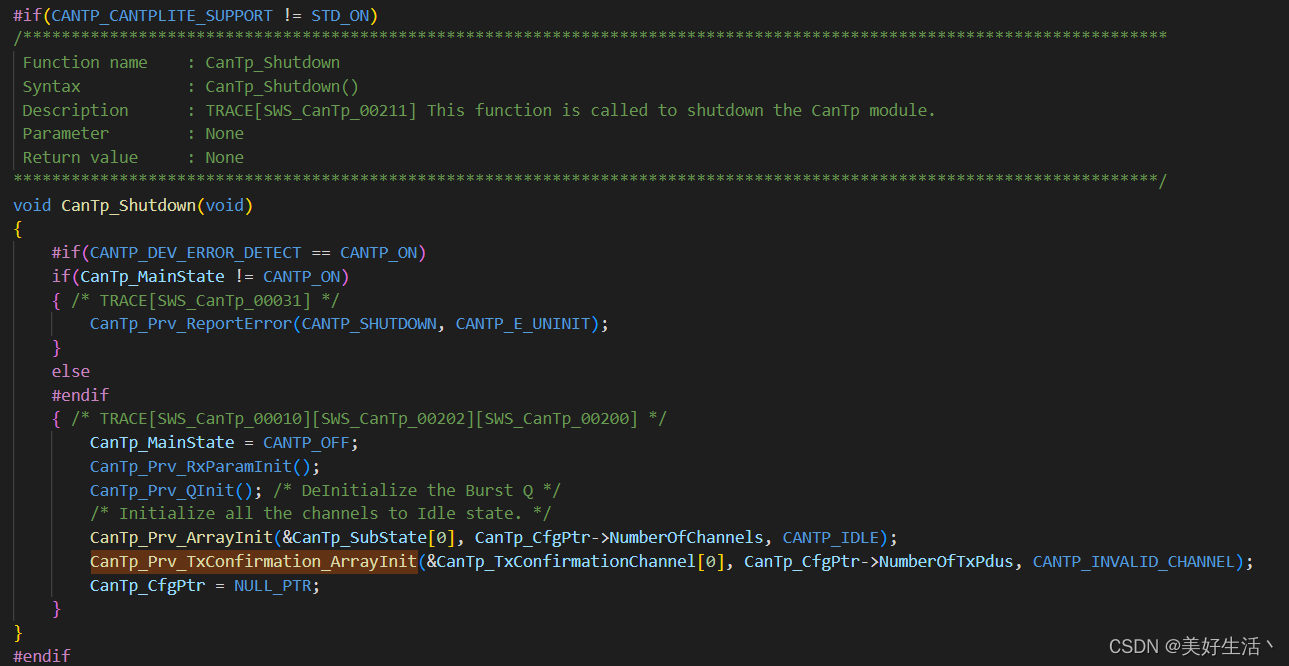
二、void CanTp_Shutdown(void)
This function is called to shutdown the CanTp module.
1、检查CanTp_MainState是否为CANTP_ON,否则会报错,在没有初始化的情况下是不允许调用CanTp_Shutdown的。
2、将CanTp_MainState初始化为CANTP_OFF状态
3、和初始化相同,将CanTp_SubState初始化为CANTP_IDLE状态,将CanTp_TxConfirmationChannel初始化为CANTP_INVALID_CHANNEL,清空CanTp的配置指针。
三、void CanTp_MainFunction(void)
CanTp scheduled functions which is called by the BSW sheduler in a cyclic interval defined by

 订阅专栏 解锁全文
订阅专栏 解锁全文
















09-28
 1230
1230
1230
07-28
2万+
2万+
02-08
1994
1994
10-07
170
170
04-28
2123
2123
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











