







 本文详细介绍了三维坐标系中物体位置变换的过程,重点讨论了局部坐标系与世界坐标系之间的转换矩阵。通过矩阵运算,阐述了如何使用逆矩阵来更新局部坐标系,以反映物体在世界坐标系中的位置变化。同时,提到了变换矩阵在物体平移中的作用,并给出了求解新局部矩阵的公式,为理解3D图形学中的坐标变换提供了清晰的理论依据。
本文详细介绍了三维坐标系中物体位置变换的过程,重点讨论了局部坐标系与世界坐标系之间的转换矩阵。通过矩阵运算,阐述了如何使用逆矩阵来更新局部坐标系,以反映物体在世界坐标系中的位置变化。同时,提到了变换矩阵在物体平移中的作用,并给出了求解新局部矩阵的公式,为理解3D图形学中的坐标变换提供了清晰的理论依据。
通常矩阵是用4*4表示
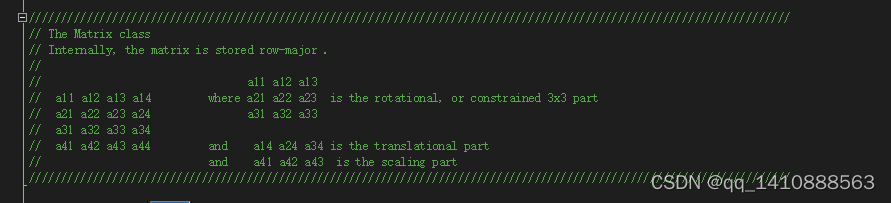
其中
a11 a12 a13 通常用来表示物体的x坐标轴信息
a21 a22 a23 通常用来表示物体的y坐标轴信息
a31 a32 a33 通常用来表示物体的z坐标轴信息
a41 a42 a43 通常用来表示物体的原点坐标位置
a14 a24 a34 通常用来表示物体的平移部分
局部坐标系和世界坐标系的关系
当物体在世界坐标系下进行变换位置,需要一个变换矩阵
矩阵*矩阵的逆=单位矩阵
其中
局部坐标系:M局
世界坐标系:M世
局部转世界坐标系的转换矩阵:T转
物体位置发生变换的变换矩阵:V变
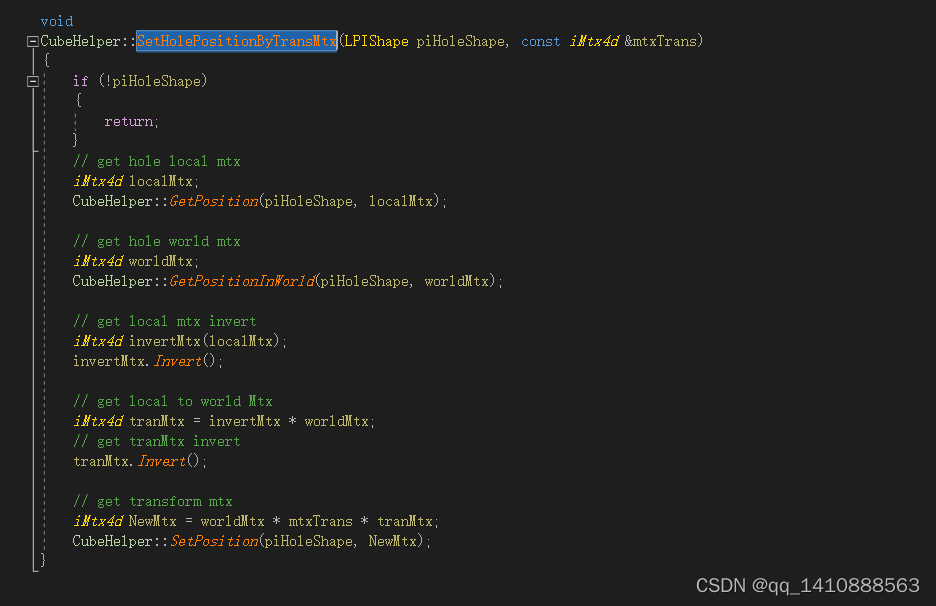
求变换后的局部矩阵
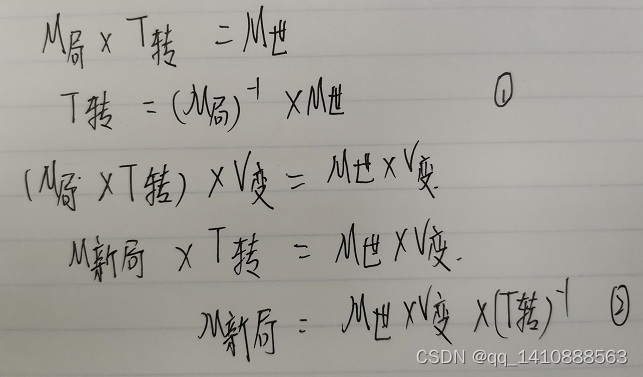
T转是不会变化的。设新的局部矩阵为:M新局
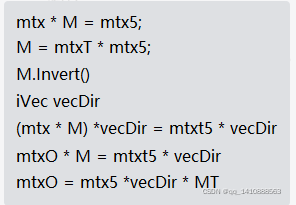
M局 * T转=M世;
T转 =(M局^-1) * M世; (1) //转换矩阵=局部矩阵的逆矩阵*世界矩阵
(M局*T转)*V变= M世*V变
M新局*T转=M世*V变 //新的局部矩阵*局部转世界矩阵=世界矩阵*世界变换矩阵
M新局=M世*V变*(T转^-1); (2)
有1、2式可以求出变换的局部矩阵

















 365
365

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









