







真实感图形显示:
计算机图形学显示真实感图像的方法和相机拍照很相似
在计算机图形学内:
架设相机相当于选择视点,选择场景相当于确定图形显示的范围,拍摄照片相当于图形变换和透视投影,冲洗照片相当于屏幕显示
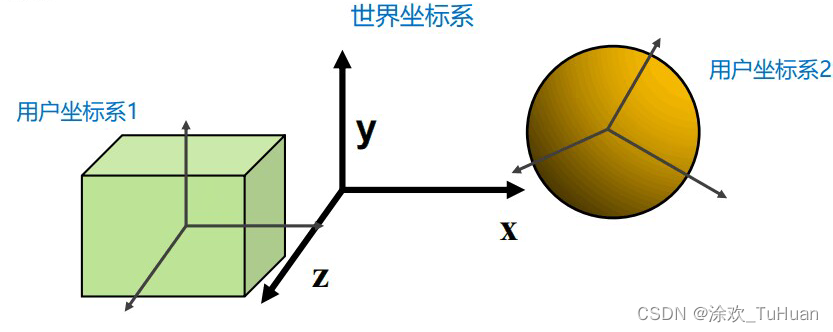
1. 局部坐标系(用户坐标系 Local Coordinate System)
定义方法:
场景中的每个物体都有自己的局部坐标系,比如我们在建立一个立方体时,往往会把局部坐标系的原点放在立方体的体心或一个顶点上。
作用:
用于构建物体内部间的位置关系。
2. 世界坐标系(World Coordinate System)
定义方法:
可以理解为整个场景的全局坐标系。
作用:
用来描述物体间的位置关系,一般定义成右手系。
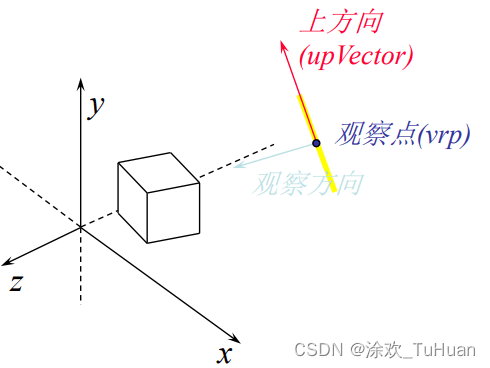
3. 观察坐标系(视域坐标系 Viewing Coordinate System)
定义方法:
以视点的位置为原点,视线方向(或反方向)为z轴,通过用户定义的一个向上的观察矢量来定义y轴,通过叉乘确定x轴。
作用:
用于指定图形的输出范围,从观察者的角度对整个世界坐标系内的对象进行重新定位和描述,从而简化几何物体在投影面成像的数学推导和计算。
4. 成像面坐标系(投影坐标系)
定义方法:
一个二维坐标系统,一般通过指定成像面与视点之间的距离来定义成像面,可进一步在成像面上定义名为窗口的方形区域来实现部分成像。
作用:
指定物体在成像面上所有的点。
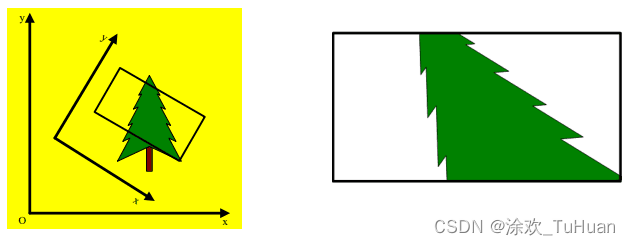
5. 屏幕坐标系(设备坐标系 Device Coordinates)
定义方法:
与图形显示设备相关的坐标系。如显示器或打印机的坐标系。
原点位于屏幕客户区的左上角,x轴水平方向为正,y轴垂直向下为正,基本单位为像素。
在定义了成像窗口的情况下,可进一步在屏幕坐标系中定义名为视图区的有界区域,视图中的成像即为实际所能观察到的内容。
作用:
某些特殊的计算机图形显示设备(如光栅显示器)表面的点的定义。
6.总结:
总之,为了在三维空间创建并显示几何物体,必须首先建立世界坐标系。然后,需要指定视点的方位、视线和成像面的方位,定义观察坐标系。为了观察到物体的成像,还必须在各坐标系实现变换之后,进行投影变换,才能得到物体的成像。


















 778
778

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











