







文章目录
- 前言
- 一、超声波传感器
- 二、tfmini激光传感器
- 三、空速计
- 四、UWB
- 五、雷讯can pmu lite电流计
- 六、RTK
- 七、3D打印机
- 八、游戏手柄
- 九、雷迅AIR LINK 4G数传
- 十、火凤凰无刷电调
- 十一、Dshot电调
- 十二、凤凰模拟器
- 十三、雷讯F9P RTK
- 十四、火凤凰新版120A,强化速龙120A无刷电调
- 十五、北天ZED-F9P RTK使用yeecom 4gdtu模块实现网络差分
- 十六、光流
- 十七、纳雷毫米波雷达
- 十八、元厚HXF260测深仪
- 1.测深仪命令列表
- 2.打开测深仪,显示内存卡图标,表示测深仪自带内存卡未损坏
- 3.将测深仪自带的内存卡拔出,使用读卡器连接电脑,内存卡自带Xlogger.cfg文件,使用文本文件打开可以更改(另外机器要断电内存卡插拔,不支持热插拔,时间长了容易损坏内存卡文件系统。)
- 4.如果自带内存卡损坏或无法正常使用,可以使用32G以下的其他内存卡代替,先将内存卡文件系统格式化为FAT32,再将卡插入机器会自动创建配置文件
- 5.连接飞控时修改参数,DT_FMT连接飞控时建议更改为DBT,其他修改如下图(其中波特率需修改为115200或更低)
- DB9是标准RS232接口,我们使用的北天UM982RTK电平为TTL电平,需要使用232接口转换,可以使用杜邦线连接两头TX,RX,GND。(TX,RX需交叉,232模块需要供电)
- 标准版固件和定制版固件RTK发送信息设置区别
- 配置完成后,在室内连接RTK后会出现WAIT标志,标志出现后说明RTK与测深仪通讯正常,然后可以去户外等待RTK信号锁定后屏幕上会出现经纬度,如下图
- 教程及后期处理文件
- 十九 BL32飞盈佳乐电调参数配置教程
- 1.下载BLHELISUITE调参软件
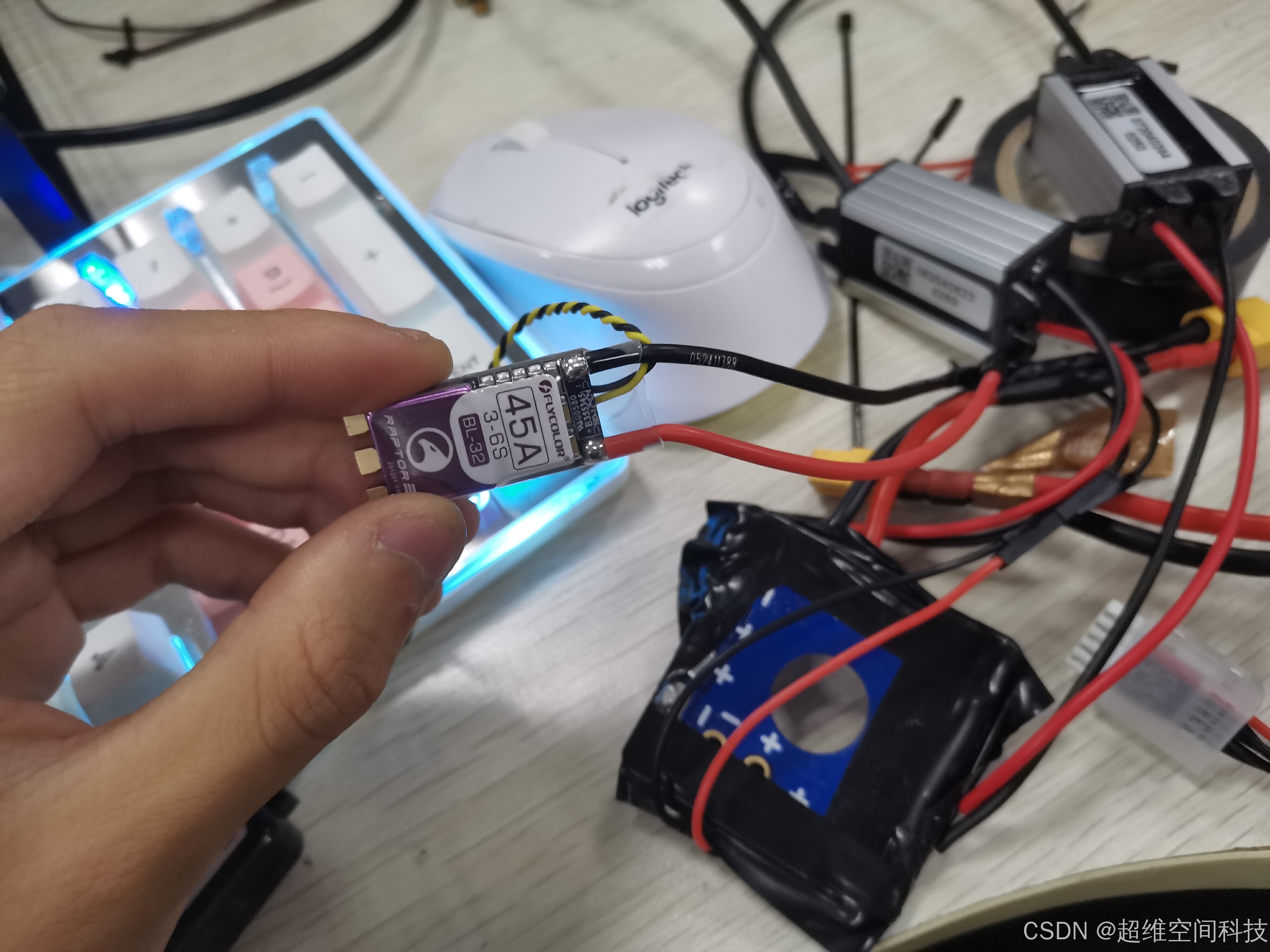
- 2.将电调和调参器连接并通电(如下图)
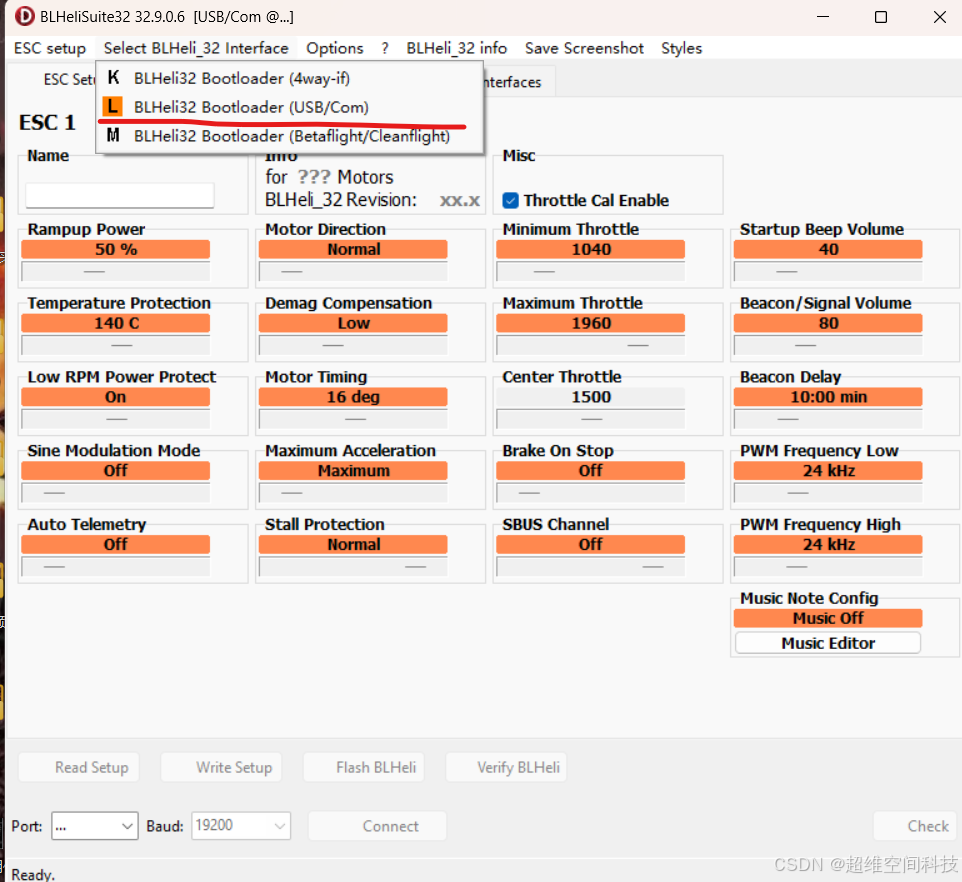
- 2.使用调参器连接电脑打开 BLHeli 软件,在 Select BLHeli_32 Interface 选项中选择 L BLHeli32Bootloader(USB/Com)选项:
- 3.将电调与烧录器(nano 板)连接,同时给电调供电,选择端口,再点击Connect 连接后变成 Disconnectl:
- 4.点击 Read Setup 读取此电调,读取成功后会弹出窗口(如下图),点击 OK。
- 5.如果无法连接(可能有以下原因)
- 6.参数介绍
- 1.Rampup Power(启动强度),选择缓慢启动和还是暴力启动,此选项仅影响启动瞬间,其它操作不干涉。
- 2.Temperature Protection(温度保护),一般选择默认值。
- 3.Low RPM Power Protect(低转速保护),一般设置默认即可。
- 4.Sine Modulation Mode(正弦调制模式)默认即可。
- 5.Auto Telemetry(自动遥测)默认即可。
- 6.Motor Direction(调节电机转向)如现在电机是顺时针旋转,需要改成逆时针,默认设置是 Normal(正常),那就需要改成 reversed(反向)即可。
- 7.Demag Compensation(消磁补偿),弗兰奇固定翼电调一般选择关闭OFF。
- 8.Motor Timing(进角)简单讲就是将进角设高,在相同的油门、电压,转速会更高,但效率降低,将进角设低,在相同的油门、电压,转速会更低,但效率提升,Auto 自动进角,就是尽最大的可能去提高效率(32 位电调的独有功能),或者根据自身需要去调节。
- 9.Maximum Acceleration(最大加速度)一般用%来表示,如设置为 10%油门最大允许的加速度在每毫秒提升 10%,Maximum 是尽最大可能将加速度提升到最大(建议新手尽可能的调低一点)。
- 10.Stall Protection(失速保护)默认即可。
- 11.Minimum Throttle(最低行程)一般设置和飞控设置的一致即可(要确认飞控里设置是否正常,一般设置 1000 或者接近 1000 即可),固定翼没有装飞控设置默认即可。
- 12.Maximum Throttle(最高行程)一般设置和飞控设置的一致即可(要确认飞控里设置是否正常,一般设置 2000 或者接近 2000 即可),固定翼没有装飞控设置默认即可。
- 13.Center Throttle(中位行程)一般默认中位 1500 即可。
- 14.Brake On Stop(停止时刹车)一般电调都是默认带刹车的,刹车不是说在飞行过程中完全刹停(桨叶停转),而是当你杆位回中时会带有一定的阻力去帮助你,刹车值用%来表示,值设置越大阻力越大,根据自身需求去设置。
- 15.SBUS Channel 一般默认即可。
- 16.Startup Beep Volume(启动音强度)给飞机上电后电调通过电机发出的提升音的音量,不建议设置太高,默认 40 即可。
- 17.Beacon/Signal Volume(警报音强度)比如警报音(静止一段时间不操作电调会通过电机发出警报音),默认 80 即可。
- 18.Beacon Delay(警报音延时),如设置为 2:00min,飞机通电后静止2min 不做任何操作电调就会通过电机发出警报的声音,一般默认即可。
- 19.PWM Frequency(PWM 频率),频率设置按自身需要去调节(建议不宜调节太高),一般默认即可。
- 20.PWM Frequency(PWM 频率),频率设置按自身需要去调节(建议不宜调节太高),一般默认即可。
- 21.Music Note Config(启动音设置)可以设置你需要的启动音。
- 7.驱动程序下载
- 二十、yeecom 4g模块
- 二一、有人4g模块
- 先飞D80Pro吊舱
前言
PX4 1.13.0
PIXHAWK4
一、超声波传感器
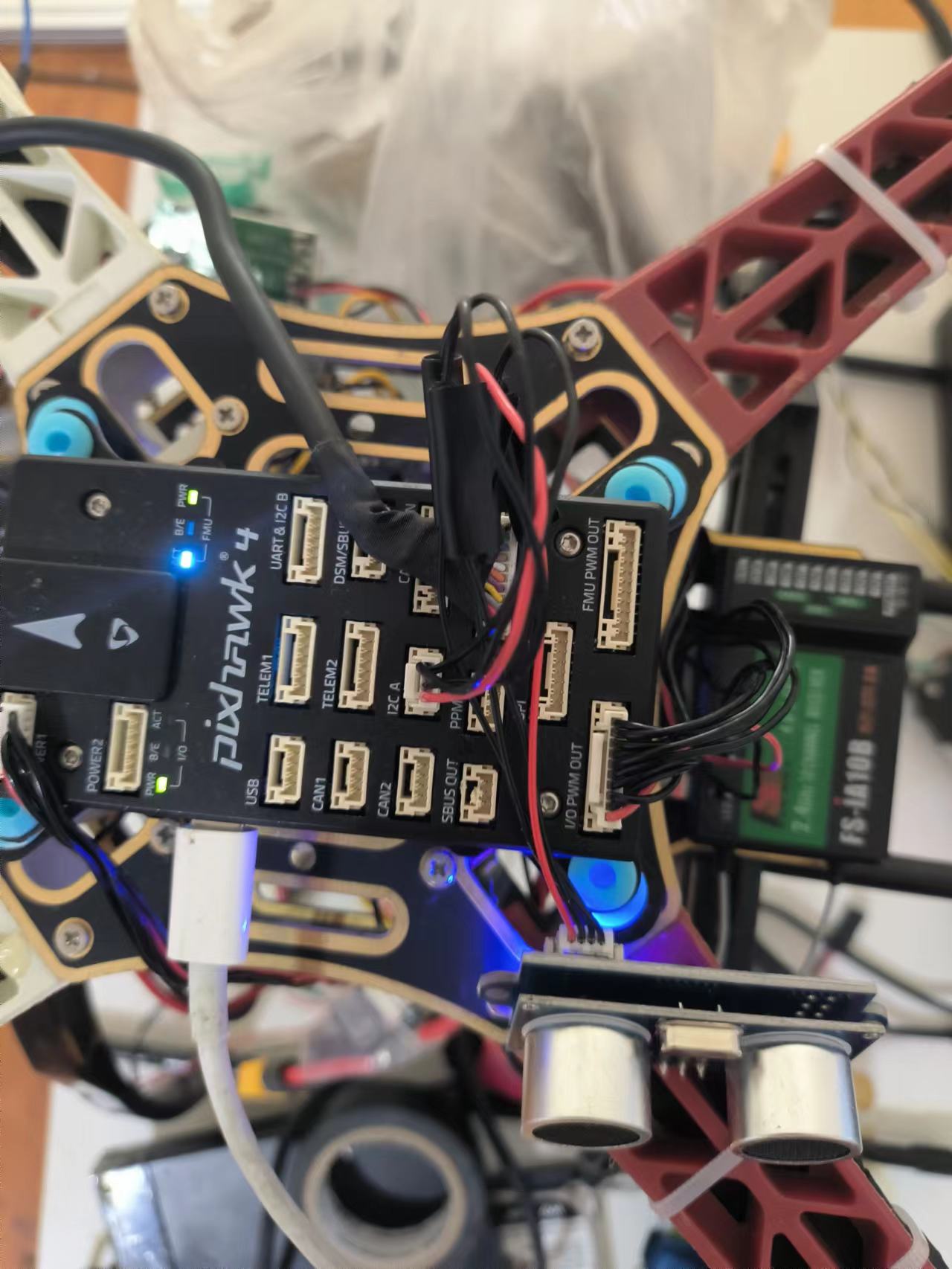
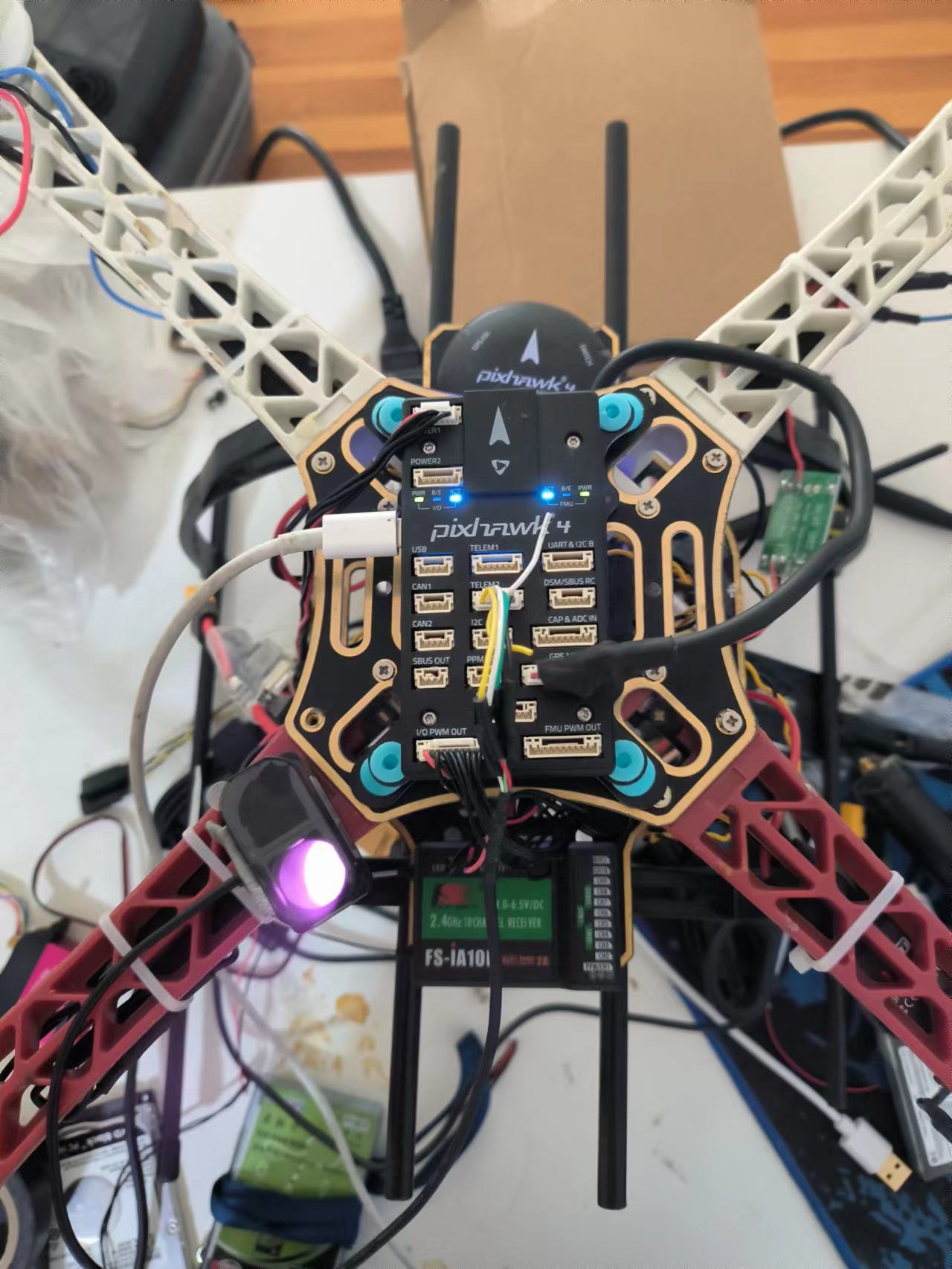
超声波传感器类似下图这种

将超声波连接到飞控的IIC口
将参数SENS_EN_MB12XX,然后重启飞控

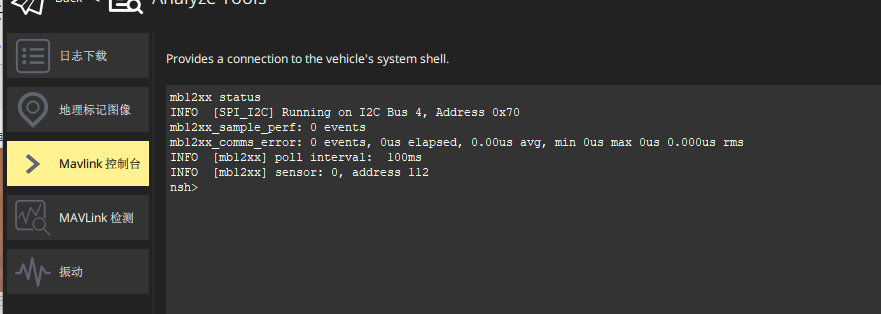
在Mavlink控制台输入
mb12xx status
输出如下打印信息说明连接正常
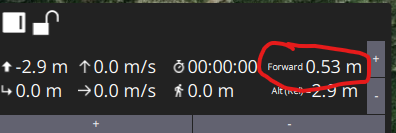
在地面站上添加以下测距传感器的显示
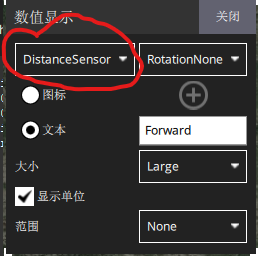
可以在地面站上看到超声波测得的距离
二、tfmini激光传感器
选用的是北醒的tfmini plus

将tfmini plus接到飞控的串口上,我这里接在uart4上
将SENS_TFMINI_CFG设置为自己连接的串口

将SER_TEL2_BAUD改成传感器的波特率(默认是115200)
修改完参数重启飞控。
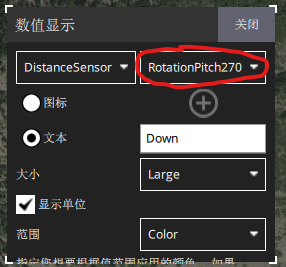
然后在QGC上添加测距传感器显示,注意角度为向下(上一节超声波为向前),如下图
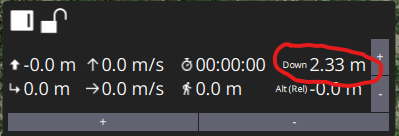
然后就可以看到测距值:
三、空速计
首先设置参数使能空速计,PX4常用的几种空速计的对应参数如下,将对应的参数改成ENABLE即可
Sensirion SDP3X (SENS_EN_SDP3X)
TE MS4525 (SENS_EN_MS4525DO)
TE MS5525 (SENS_EN_MS5525DS)
Eagle Tree airspeed sensor (SENS_EN_ETSASPD)
我这里使用的是MS4525DO传感器,所以将SENS_EN_MS4525DO设置成ENABLE

如果是使用的是雷讯的MS5525空速计,将SENS_EN_MS5525DS设置成ENABLE

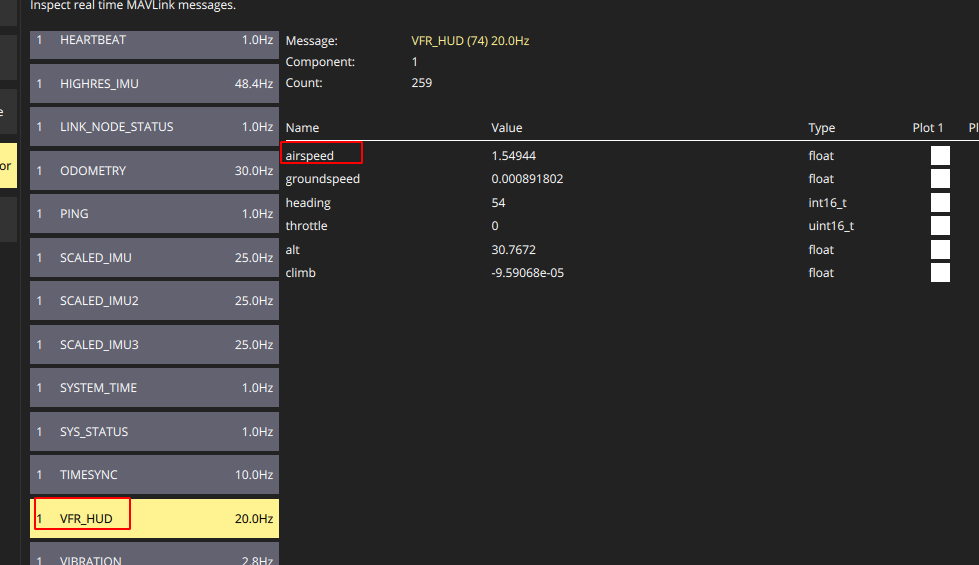
然后将空速计通过IIC接口与飞控连接,将飞控连接至地面站,正常的话可以看到空速数据
校准空速计
先挡住空速计的管子,确保没有风经过,但不要堵住空速管的任何一个孔
然后在地面站点击校准空速计,出现下面的提示后,向空速管动压头子吹气

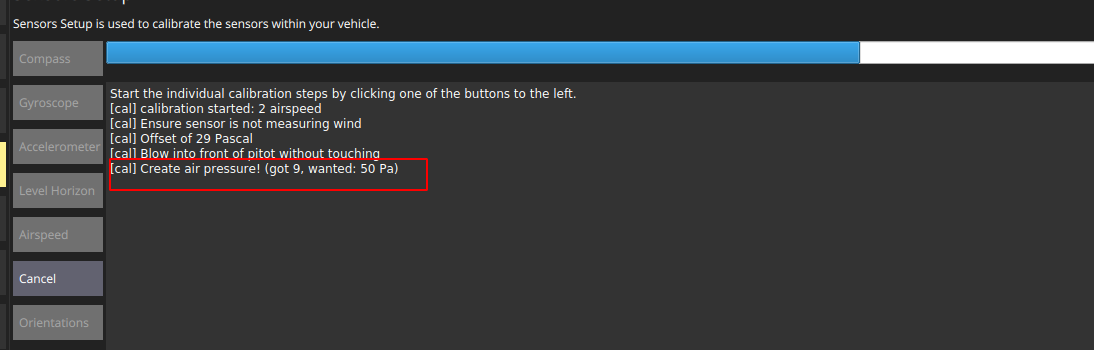
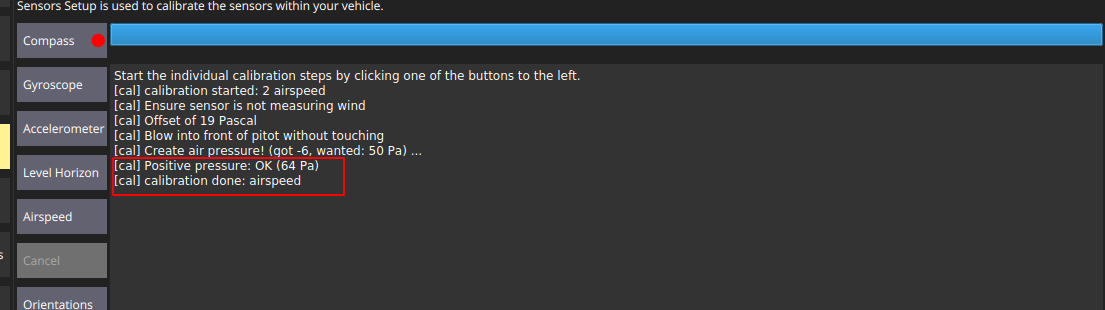
出现下面的提示说明校准成功
注意空速动态和静态端口是否安装正确。如果接反,向管中吹气时,传感器将读取较大的负压差,校准就会报错,正确的接法是空速管长的那个头子接传感器上面那个口,短的接下面那个口。

四、UWB
采用的uwb模块为空循环公司的LinkTrack AOA跟随系统:

资料链接:
https://www.nooploop.com/download/
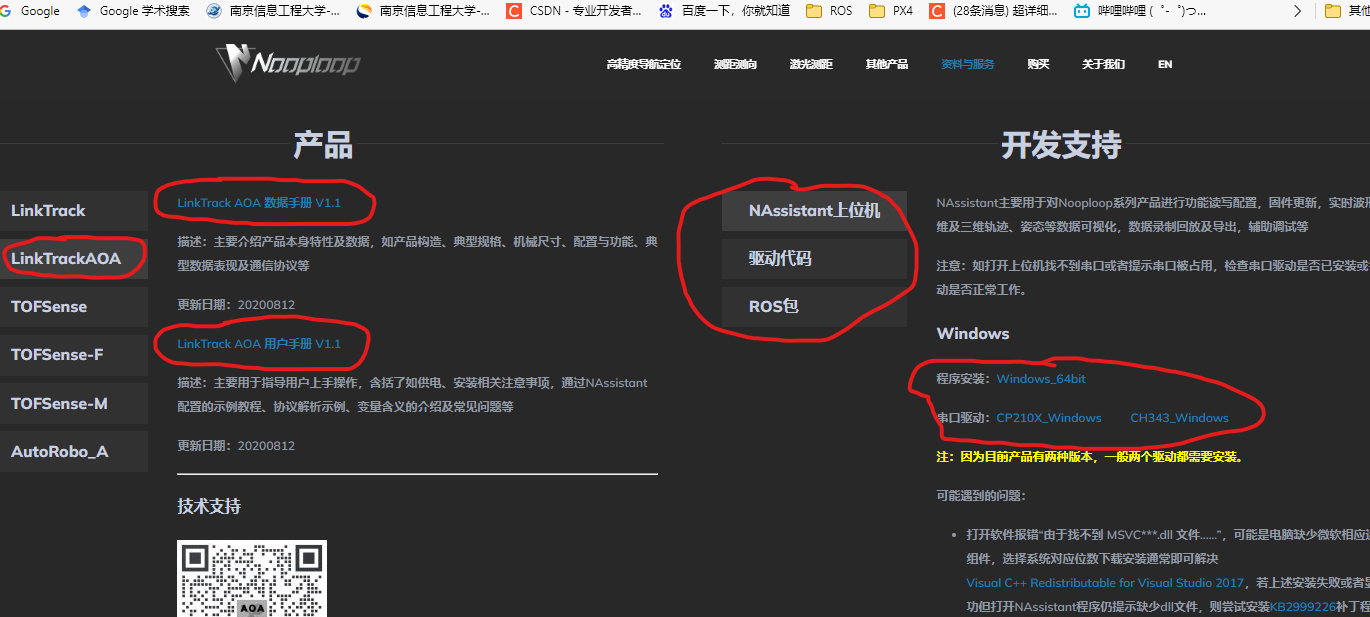
安装NAssistant上位机,我这里下载Windos_64bit,下载后双击安装,除此以外还需要安装下面两个USB转串口的驱动,双击安装即可。
将基站通过USB转TTL接到电脑上

将标签上电(随便在哪上电,可以不用插电脑上)
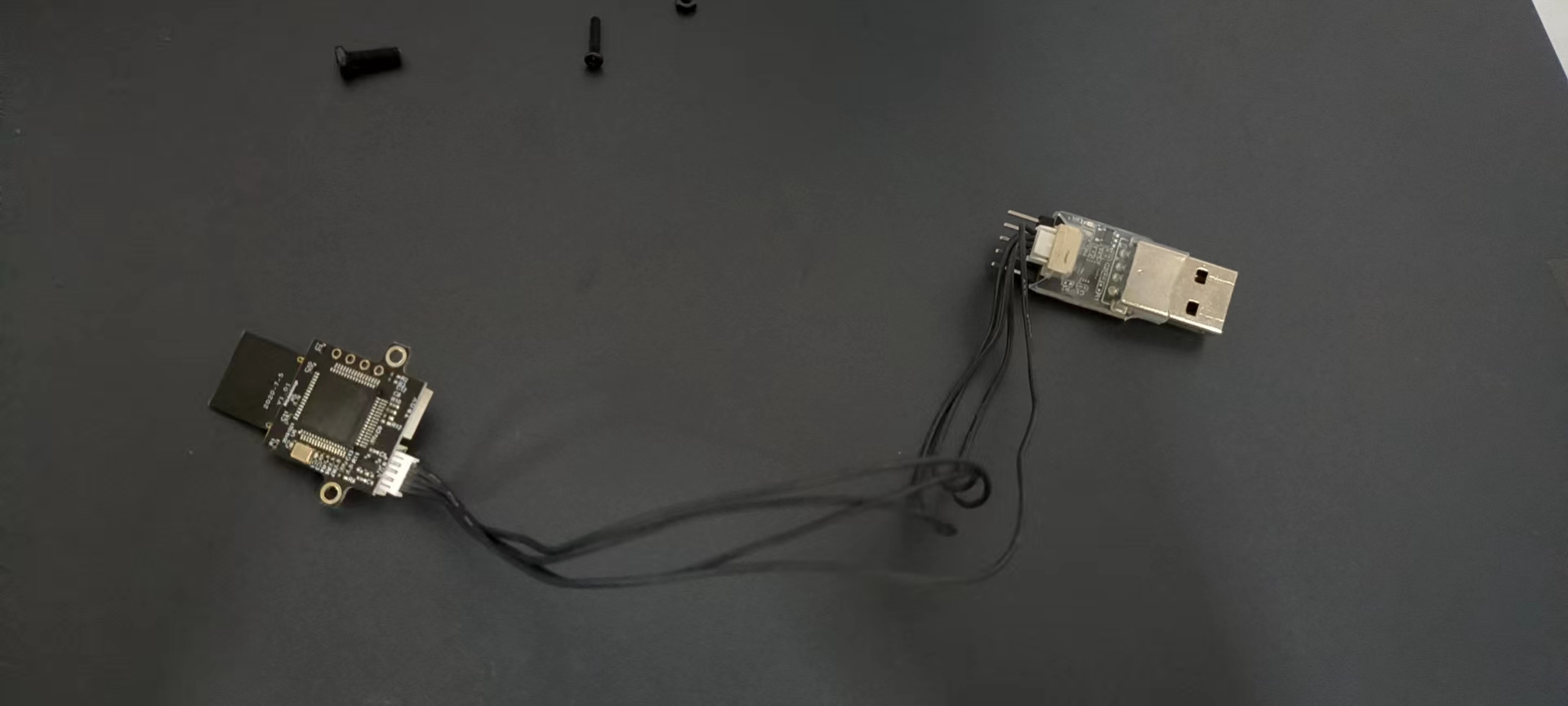
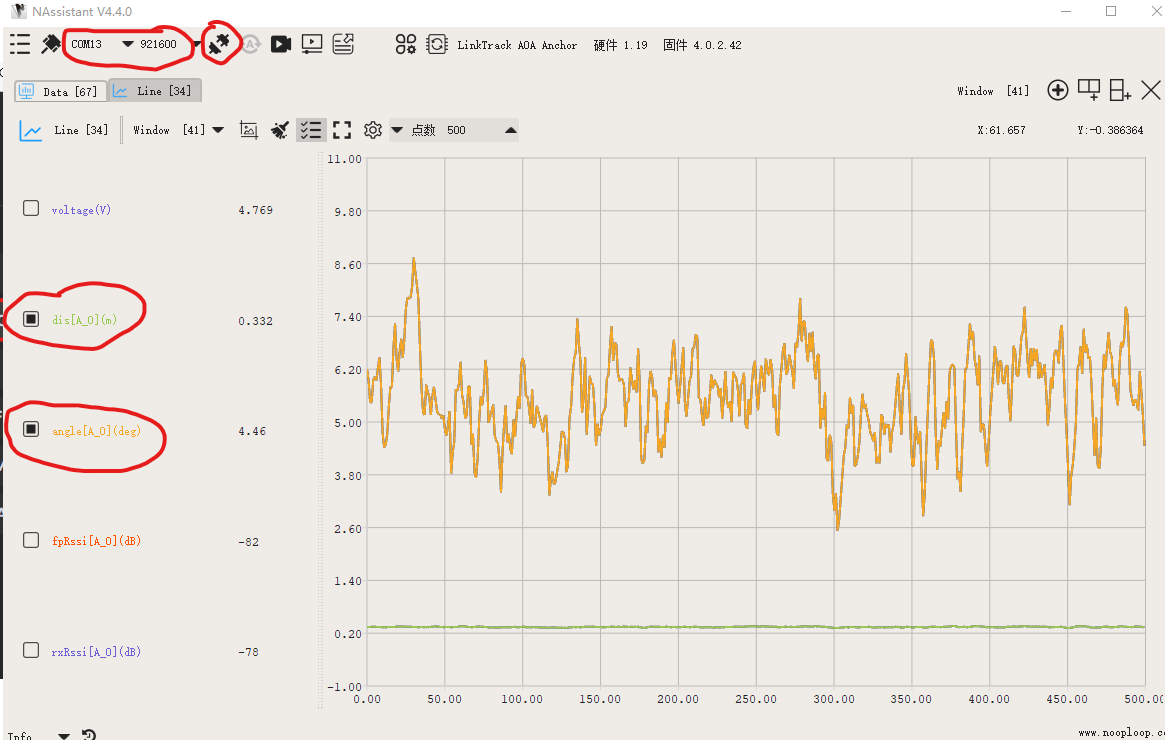
打开NAssistant,设置端口为基站的端口,波特率为921600,然后点击右侧的插头图标连接(默认会自动连接),连接成功后,选中左侧dis和angle复选框,正常的话会在右侧显示距离和角度信息。
五、雷讯can pmu lite电流计
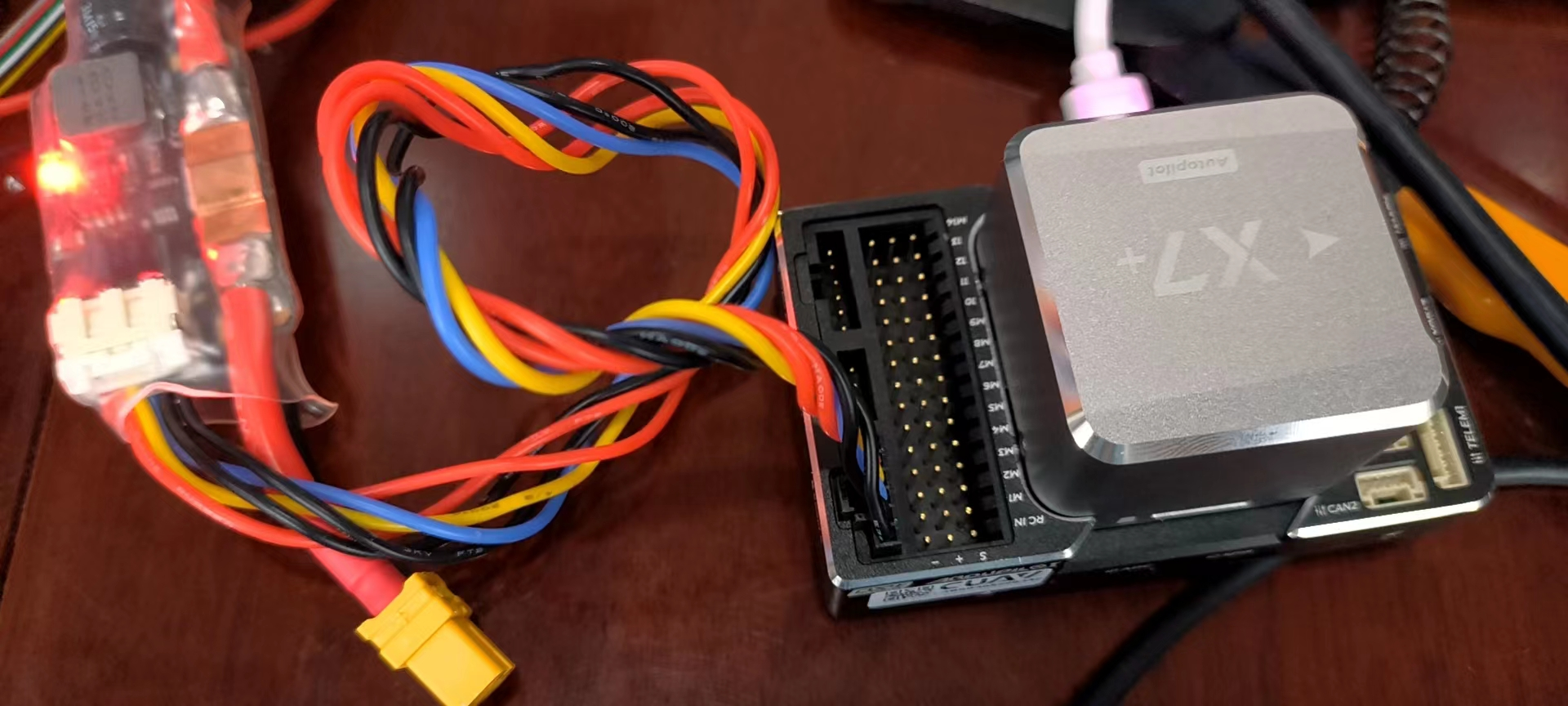
雷讯X7飞控,原装can pmu lite电流计
将电流计接到powerC接口
将UAVCAN_ENABLE设置为Sensors Automatic Config
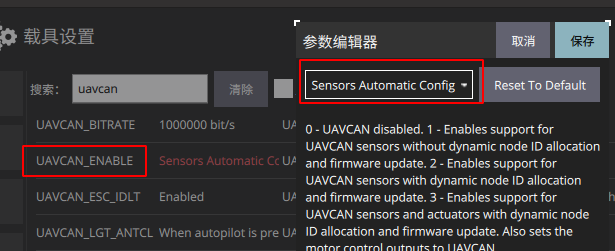
将UAVCAN_SUB_BAT设置为Enabled
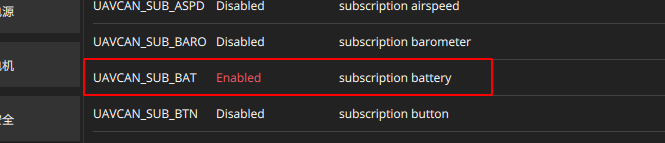
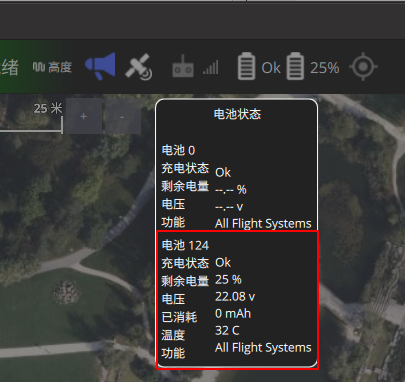
重启飞控后即可看到电池状态
六、RTK
一、北力 GRTK
飞控:PIXHAWK4
本文使用的北力RTK是国产板卡,因此需要修改一下GPS驱动才能使用,如果使用的是标准的GPS板卡(如ublox的F9P),可以直接使用即可。
北力 GRTK使用手册
https://wiki.blicube.com/grtk/GRTK%E7%94%A8%E6%88%B7%E6%89%8B%E5%86%8C/
1.接线
GRTK端口定义如下:
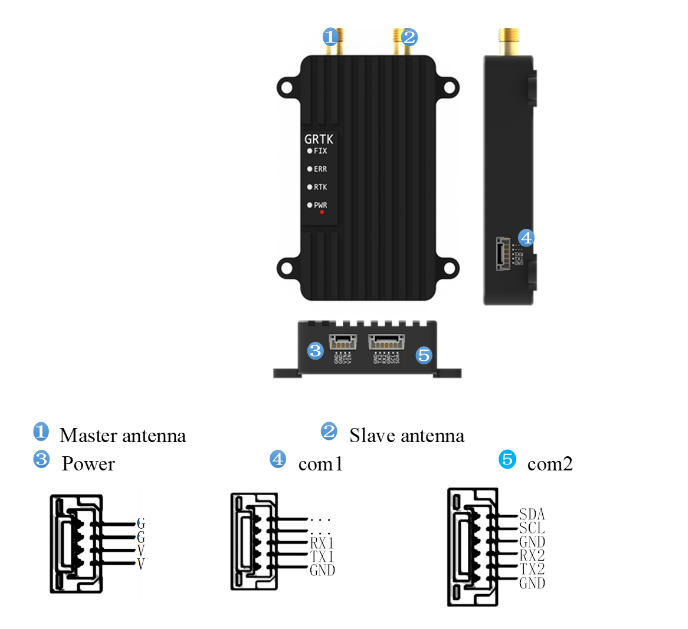
移动站接线
RTK通过串口与飞控通信,可以随便找一个板载的串口都可以,我这里使用的是TELEM2口。将飞控的TX接RTK的RX2,飞控的RX接RTK的TX2,然后共地即可,如下图。

RTK直接用锂电池供电即可,如下图。
移动站的com1口用于接收基站差分数据,我这里用的是Mirohard P900数传,波特率设置成115200,移动站的tx接电台的rx,移动站的rx接电台的tx,再共地即可。
基站接线
将基站的com1的tx接电台的rx,rx接电台的tx,然后共地即可。

2.飞控设置
我这里设置的是TELEM2
将GPS_1_CONFIG设置为TELEM2,将GPS_1_PROTOCOL设置为NMEA
将SER_TEL2_BAUD设置为RTK的波特率设置(RTK默认是115200)

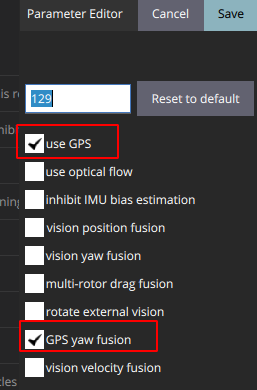
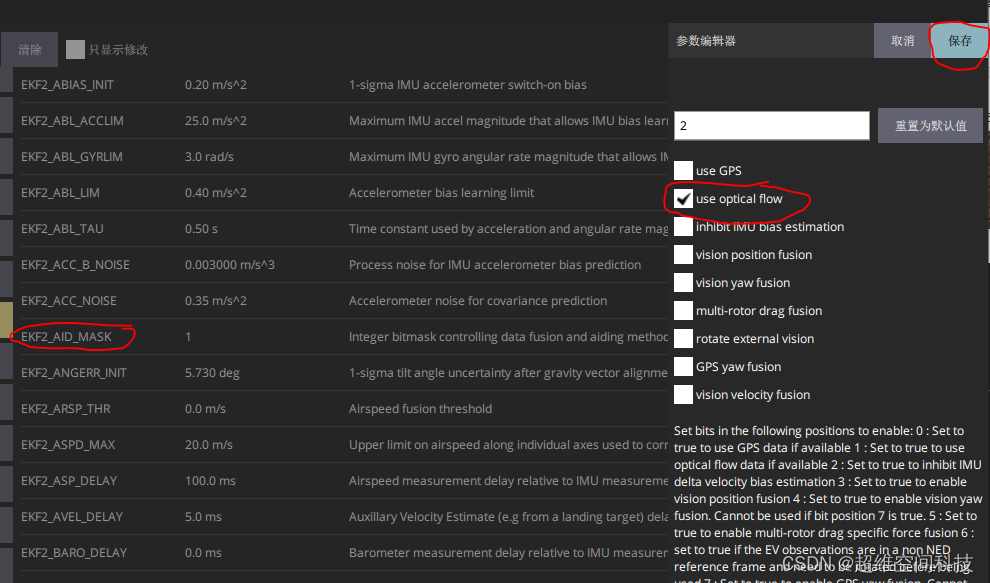
双天线RTK航向精度较高,可以启动GPS航向,修改EKF2_AID_MASK如下
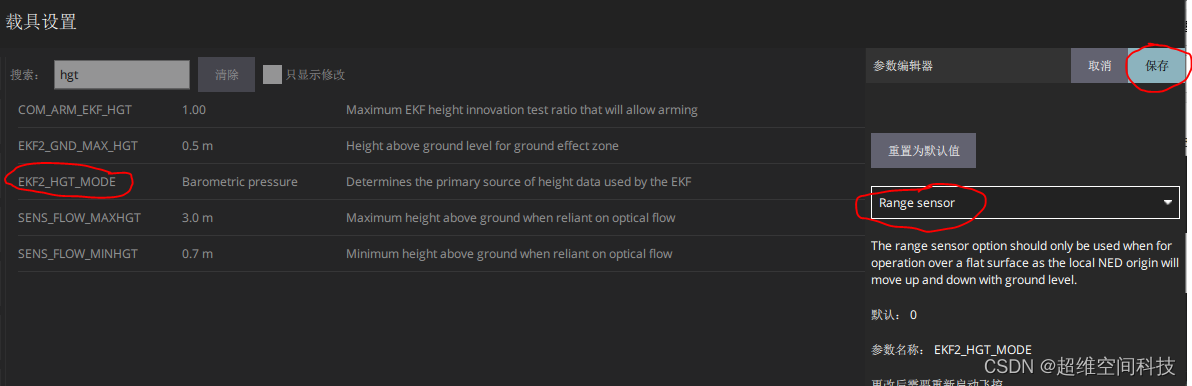
可以采用GPS高度,修改EKF2_HGT_MODE为GPS,如下

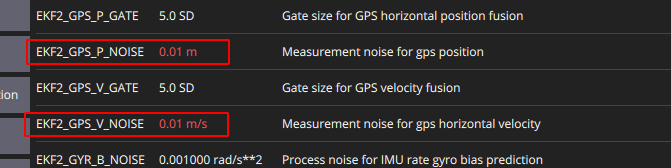
RTK的精度较高,将GPS位置和速度的观测噪声改小,使得融合时更依赖RTK,修改EKF2_GPS_P_NOISE和EKF2_GPS_V_NOISE如下:
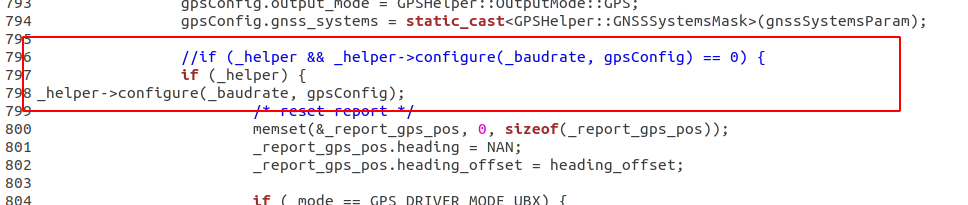
修改下图文件
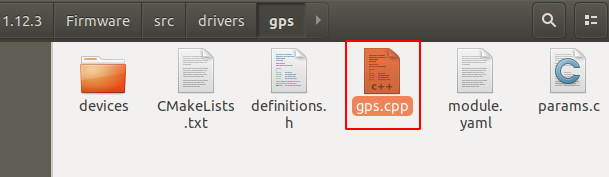
修改如下
将
if (_helper && _helper->configure(_baudrate, gpsConfig) == 0) {
改成
if (_helper) {
_helper->configure(_baudrate, gpsConfig);
将下图的
unsigned receive_timeout = TIMEOUT_5HZ;
改成
unsigned receive_timeout = TIMEOUT_1HZ;
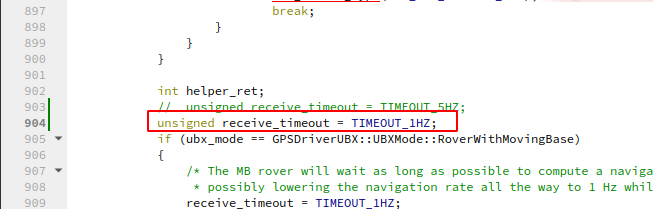
如果不改成1HZ的话可能会有很多丢包。
3.配置GRTK
可以用串口进行对RTK输出的语句和频率进行配置。
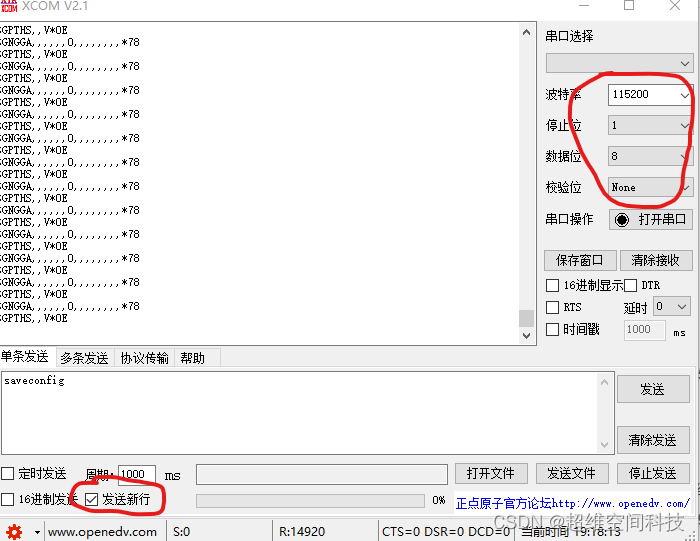
将GRTK的COM2口通过USB转TTL模块连接到电脑的串口助手(我这里使用的是cutecom),波特率设置成模块的波特率(默认115200),连接上之后串口助手上会显示接收到的语句(ASCII码格式)。
 然后向模块发送配置指令(ASCII码格式)
然后向模块发送配置指令(ASCII码格式)
GPGSV COM2 0.2
注意每条命令以CR/LF结尾
发送结果如下:

发送完后模块就会输出GSV语句,如下:
 同理,发送
同理,发送
GPGST COM2 0.2
并以CR/LF结尾,发送成功后模块会输出GST语句。
最后输入下面命令保存,命令以CR/LF结尾
SAVECONFIG
配置完成后就会输出相应的语句了。
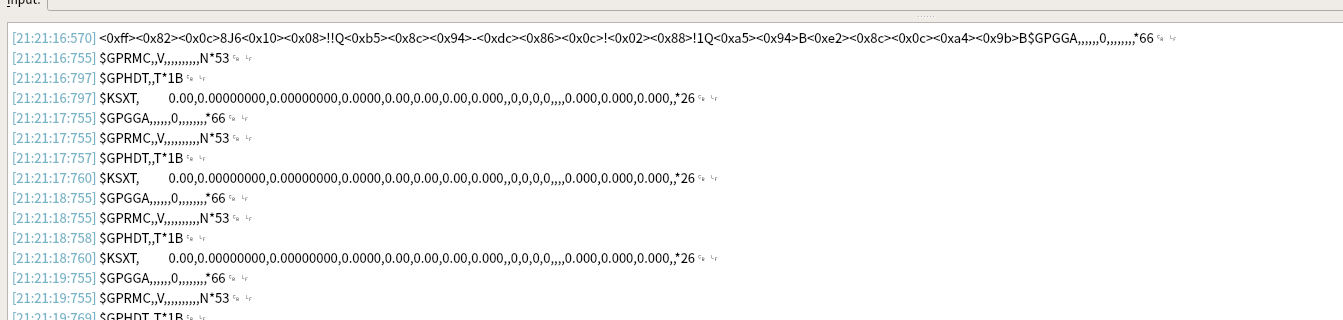
如果把基站配置成移动站
先
freset
MODE ROVER
然后
GPGGA COM2 0.2
GPRMC COM2 0.2
GPHDT COM2 0.2
KSXT COM2 0.2
SAVECONFIG
4.测试
如果移动站想用双天线航向,需要主天线在后从天线在前,主是ant1,否则航向会相差180度,两个天线尽量支高,间距不要太近。
将移动站和基站都上电,等待一段时间后,移动站会进入差分模式,如下:

打开地面站,可以看到是RTK模式
二、中海达A16
中海达A16RTK的使用方法和GRTK类似,PX4的修改和参数配置相同
1.配置RTK
中海达RTK的配置软件
https://download.csdn.net/download/qq_38768959/86587597
安装软件后,打开长按电源开关打开RTK

然后手机连接RTK蓝牙

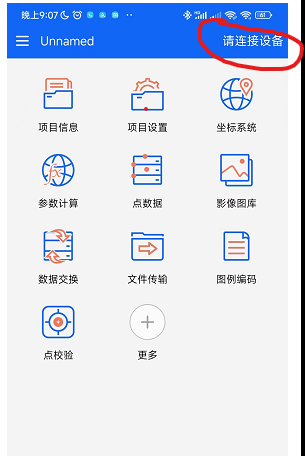
打开配置软件,点击下面的“请连接设备”
点击下面的“连接”
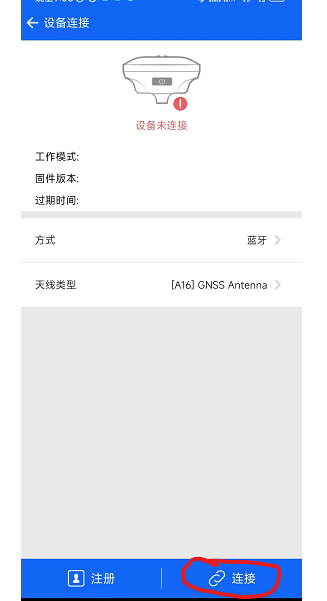
点击RTK的蓝牙并连接
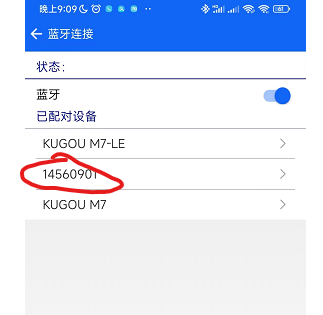
出现下面的页面表示已经连接上,点击左上角返回

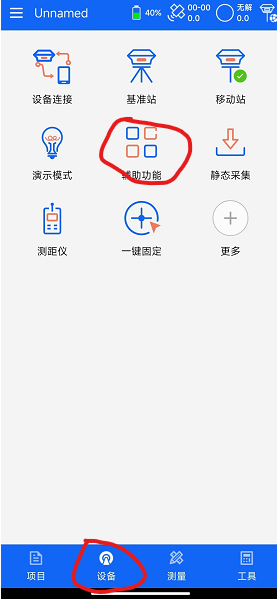
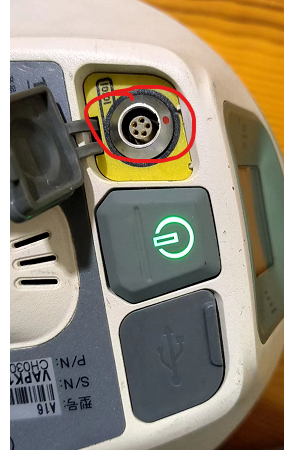
点击下方的“设备”,然后点击“辅助功能”
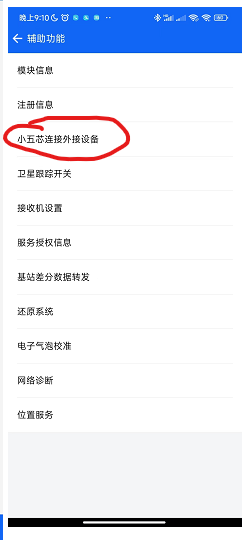
点击“小五芯连接外接设备”
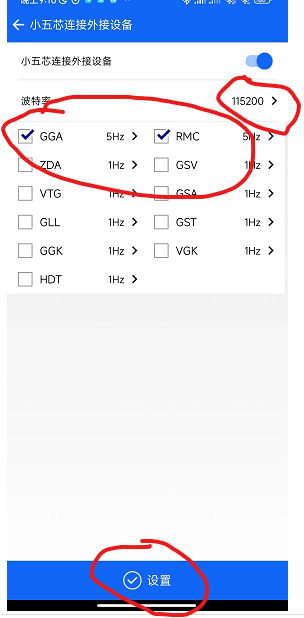
设置波特率、输出语句和频率,最后点击“设置”
2.接线
将RTK的5芯输出口通过232转TTL接到飞控上即可
三、北天UM982
配置输出
将模块的串口1通过usb转ttl接到串口助手,默认波特率115200
依次发送下面配置语句
mode rover
gpgga com1 1
gpths com1 1
gphdt com1 1
saveconfig
apm rover4.4固件设置
我这里接的是pix2.4.8飞控的gps口,设置如下:
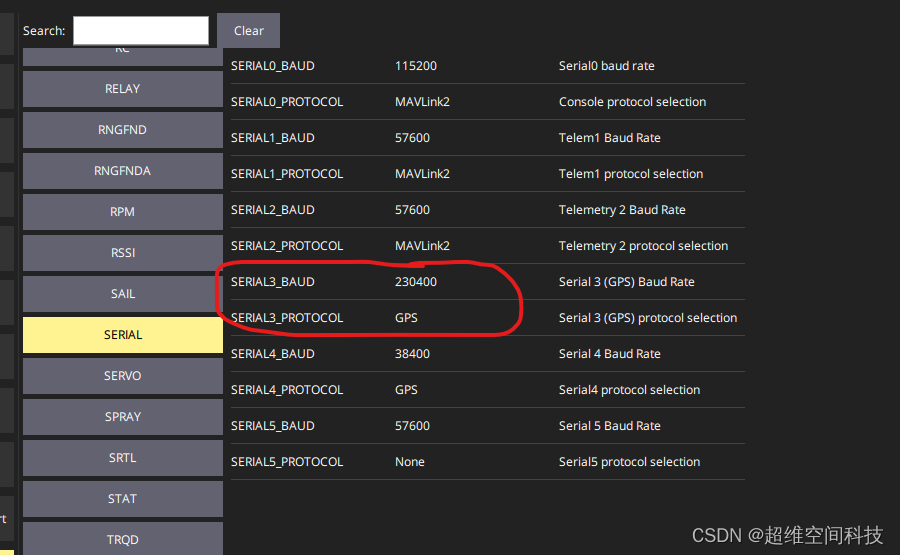
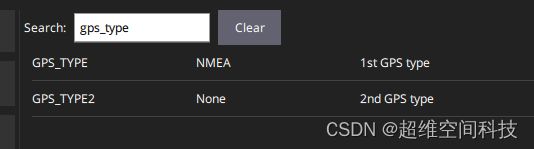
gps_type手动设置成NMEA
https://ardupilot.org/rover/docs/common-gps-for-yaw.html
四、元生惯导RTK
型号:YIN680
固件:Rover4.4
说明书wangpan
通过网盘分享的文件:YESENSE YIN680产品手册-V1.0.pdf
链接: https://pan.baidu.com/s/1Uv0dckpbHqfnsIKvcxbusw?pwd=yi9b 提取码: yi9b
–来自百度网盘超级会员v7的分享
模块默认的波特率是460800
将模块的main口连接到串口助手,以16进制发送下面的配置指令:
59 53 4e 22 00 03 00 00 00 73 fa
发送完后模块会输出gga和rmc语句
然后将模块main口接到飞控上,设置飞控的GPS参数,设置完后飞控就能识别出来RTK
由于APM固件默认没有用RMC航向,所以要改下固件,修改下面的文件

在下面的位置添加 _new_gps_yaw = -_parse_decimal_100(_term)+9000;

在下面的位置添加:
if (_last_AGRICA_ms != 0 || _expect_agrica) {
// use AGRICA
break;
}
if (isnan(_new_gps_yaw)) {
// empty sentence
break;
}
_last_yaw_ms = now;
state.gps_yaw = wrap_360(_new_gps_yaw*0.01f);
state.have_gps_yaw = true;
state.gps_yaw_time_ms = now;
// remember that we are setup to provide yaw. With
// a NMEA GPS we can only tell if the GPS is
// configured to provide yaw when it first sends a
// HDT sentence.
state.gps_yaw_configured = true;

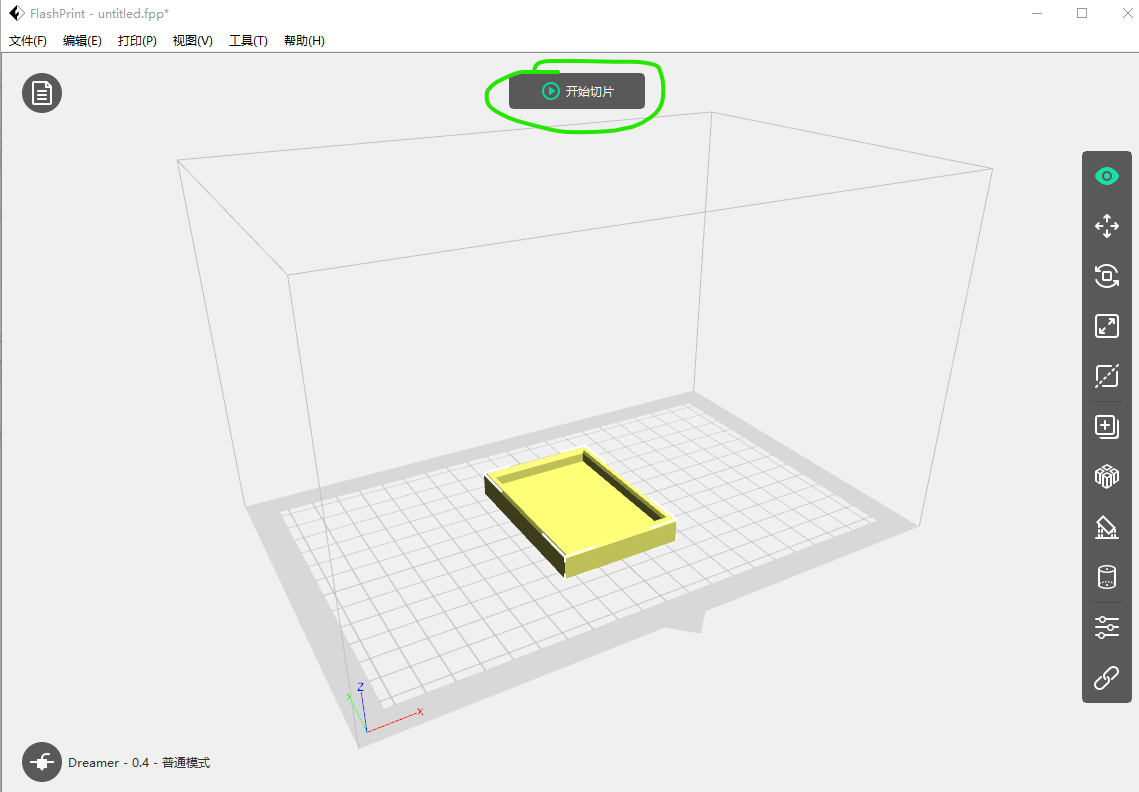
七、3D打印机
闪铸梦想家3D打印机
这里假设已经设计好了stl格式的3D打印文件(一般的3维结构设计软件都可以导出该格式)
stl格式的文件还不能直接用来打印,需要用切片软件导出gx格式。
安装切片软件
https://www.sz3dp.com/download-center
我这里下载windos 64位版
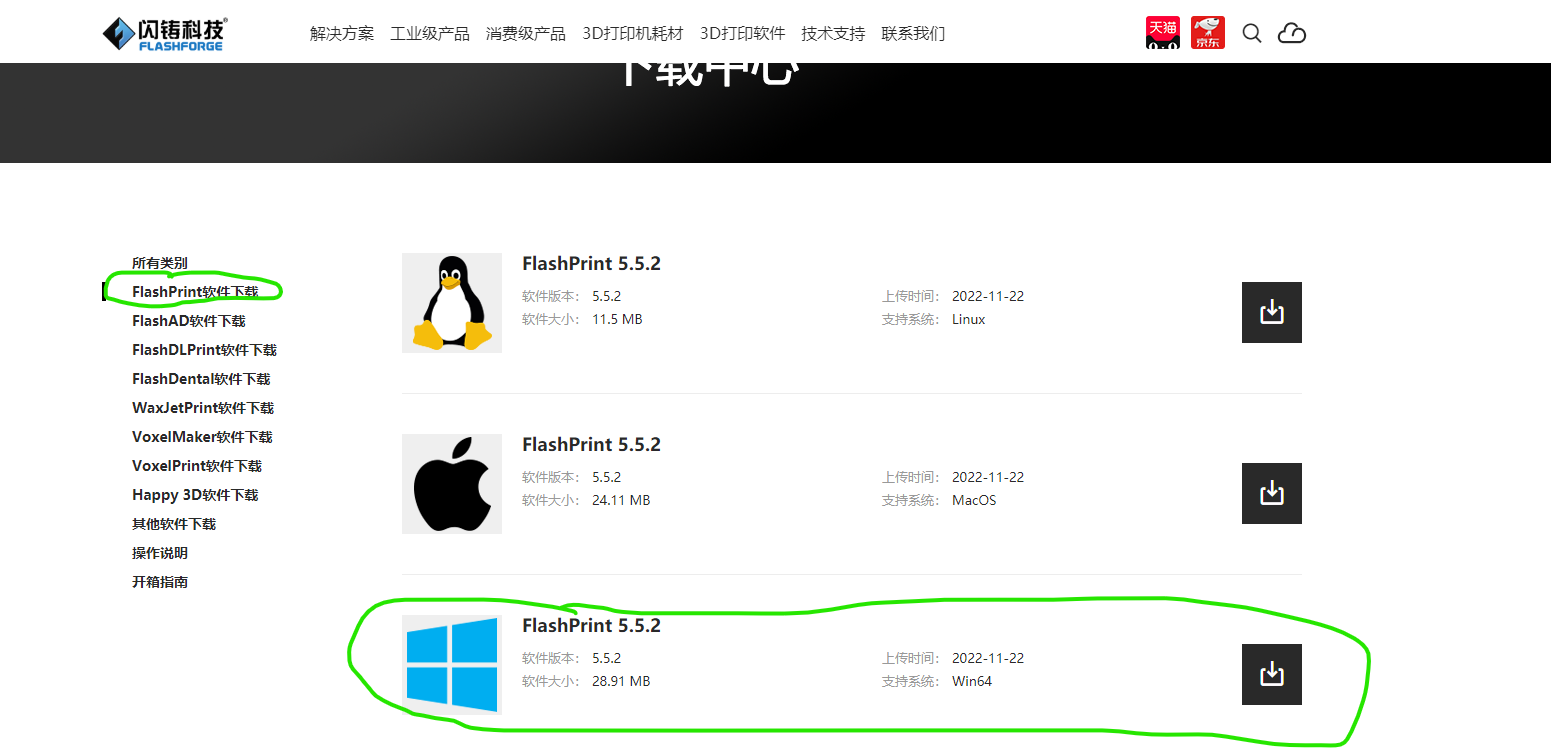
下载压缩包后解压,然后双击exe一直下一步安装,安装完打开
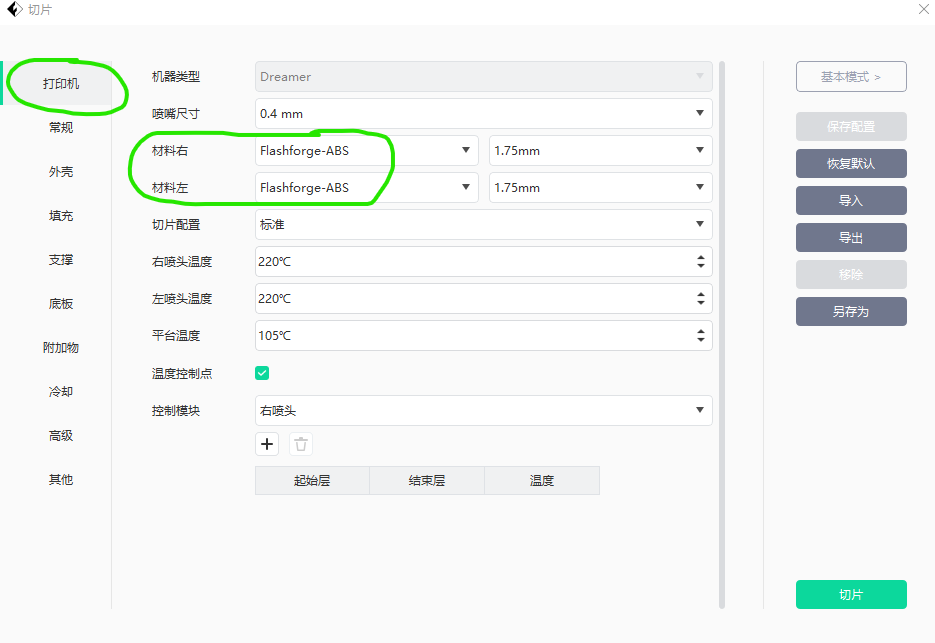
机器类型选Dreamer
电机文件->载入文件
选择stl文件
点击开始切片
设置打印材料
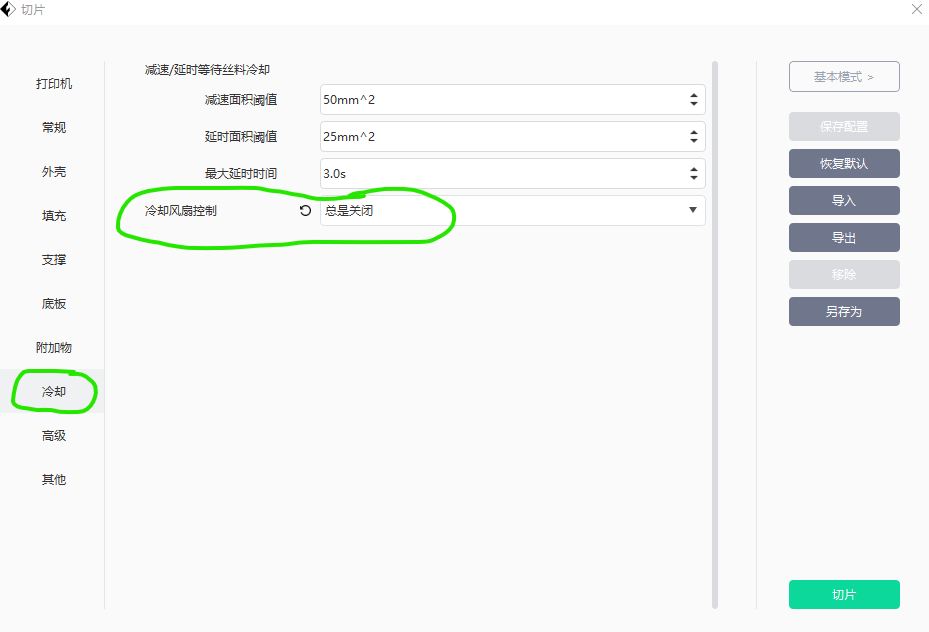
如果出现打印的时候材料与平台粘的不牢,可以设置风扇为总是关闭
设置完毕后点击切片

切片完成后点击下载
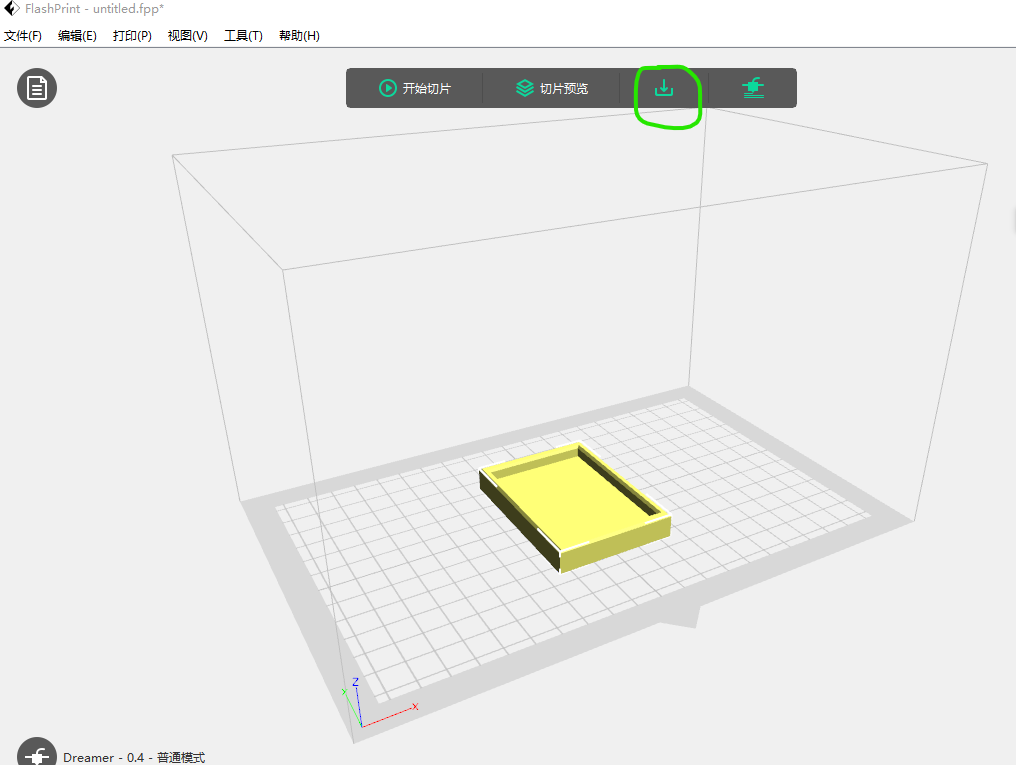
保存为gx格式,就可以复制到SD卡中进行打印了

打印完成后如果打印件与平台粘的太牢拿不下来,可以将平台加热到50度,然后用美工刀在边角处铲出一条缝,再用铲刀铲
注意在调平平台的时候,不要把喷头调的太低,否则可能导致打印完后与平台粘的太牢取不下来
如何插上内存卡后,出现下面的显示
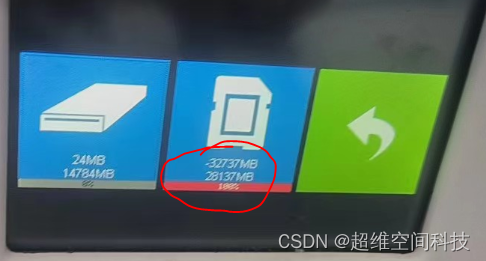
并且打印到一半出现下面的报错:
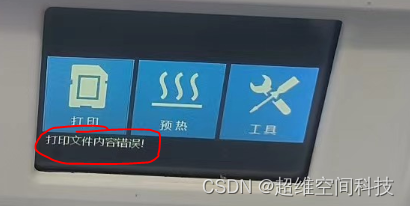
原因可能是内存卡的容量太大,可以换16G或更小的内存卡,格式化为Fat格式

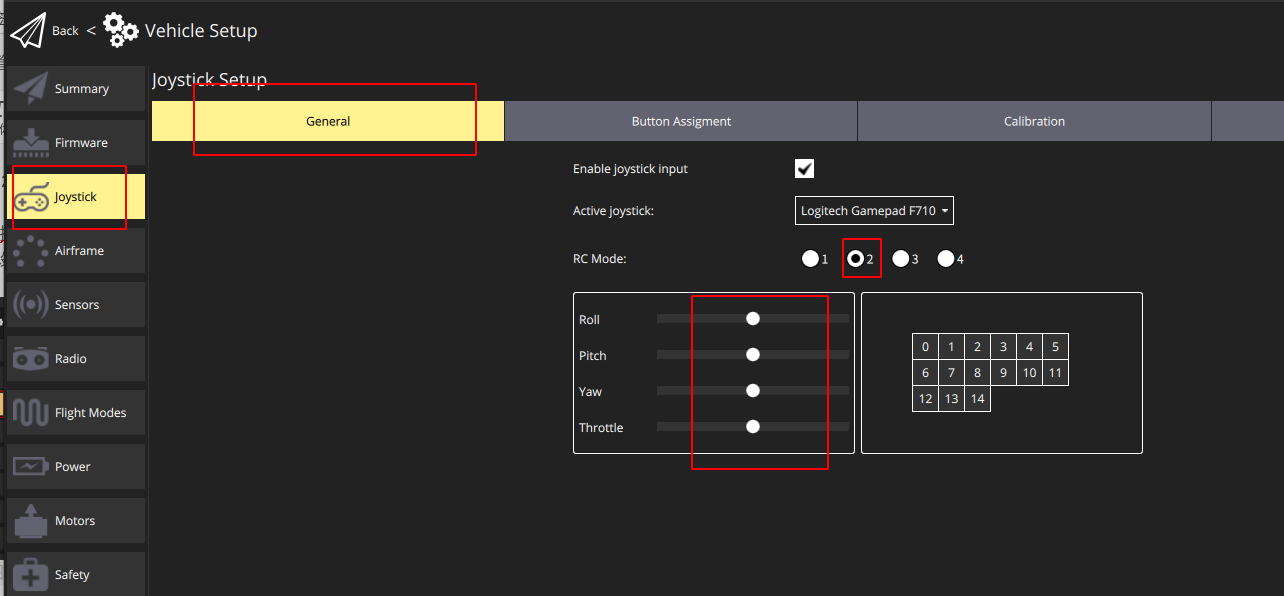
八、游戏手柄
手柄型号:罗技F710
PX4 1.13.2
QGC 4.2
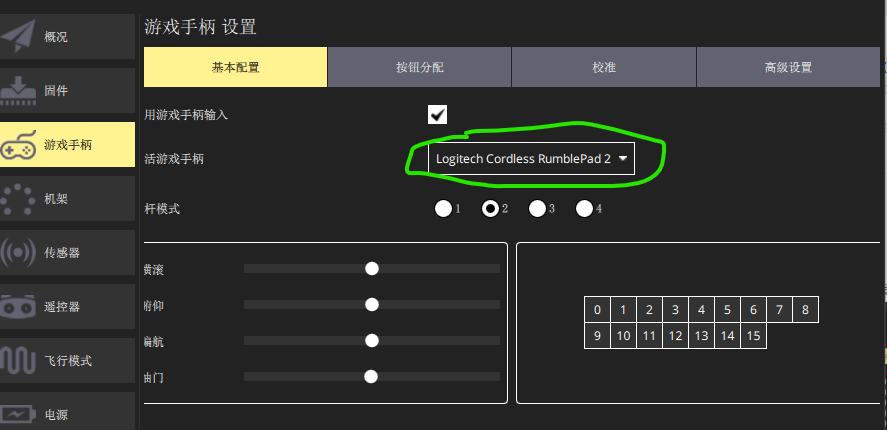
QGC先链接到无人机,然后将手柄的蓝牙USB连接到电脑
然后打开设置页面,选择对应型号的游戏手柄
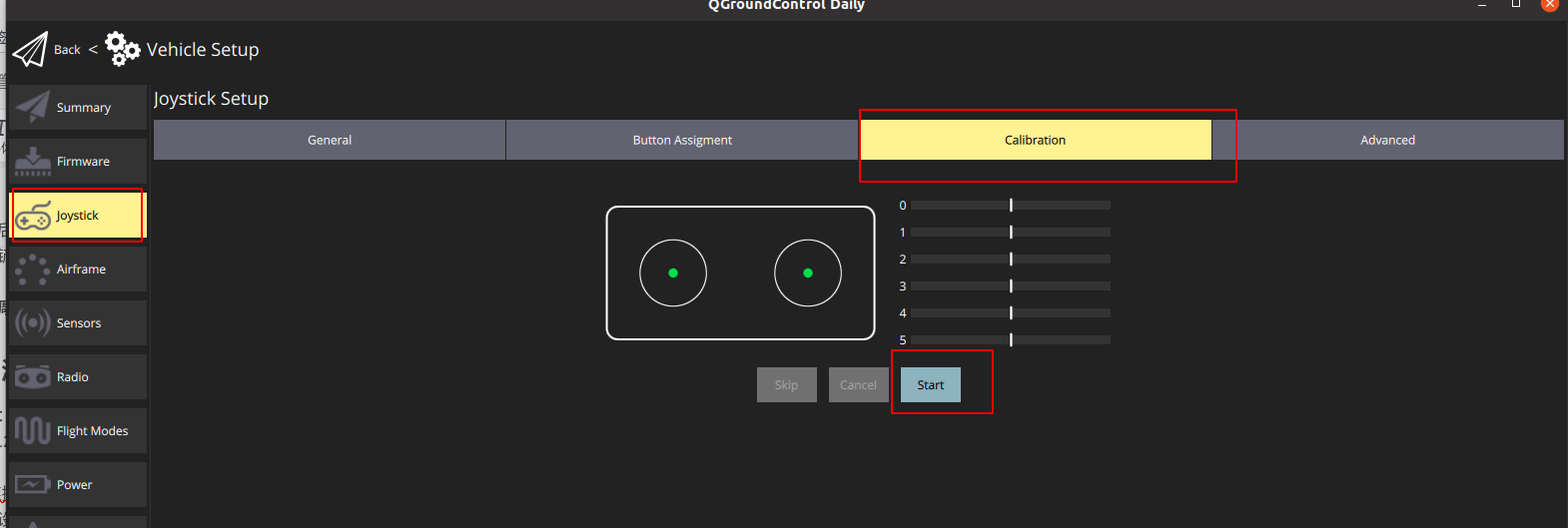
打开joystick->Calibration,点击start,安装提示拨动手柄下方两个黑色的圆形的摇杆。
校准完之后,回到General页面,RC mode选择2,拨动摇杆看左下四个通道的变换是否正确。
 最后到Button Assigment页面,设置手柄的按钮为解锁或切换模式开关,然后就可以用手柄控制无人机解锁飞行了
最后到Button Assigment页面,设置手柄的按钮为解锁或切换模式开关,然后就可以用手柄控制无人机解锁飞行了
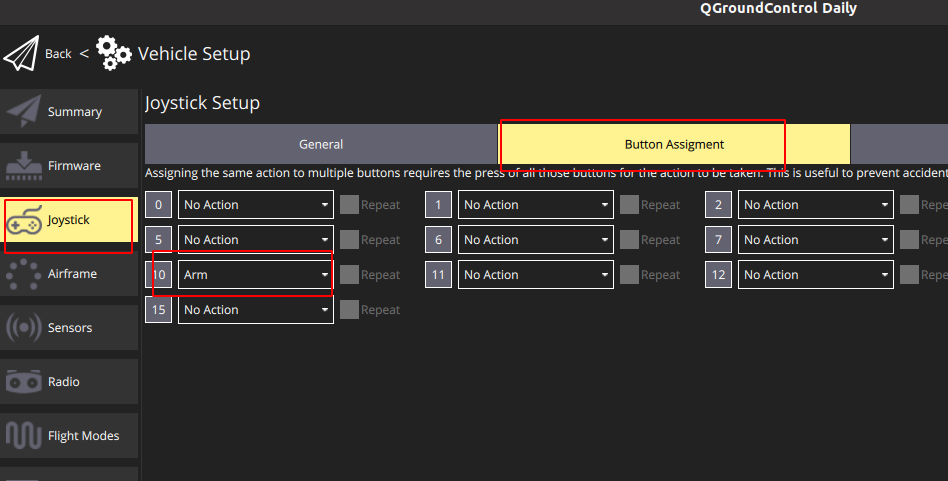
如果想用手柄通过地面站控制无人机,需要设置COM_RC_IN_MODE参数为joystick only

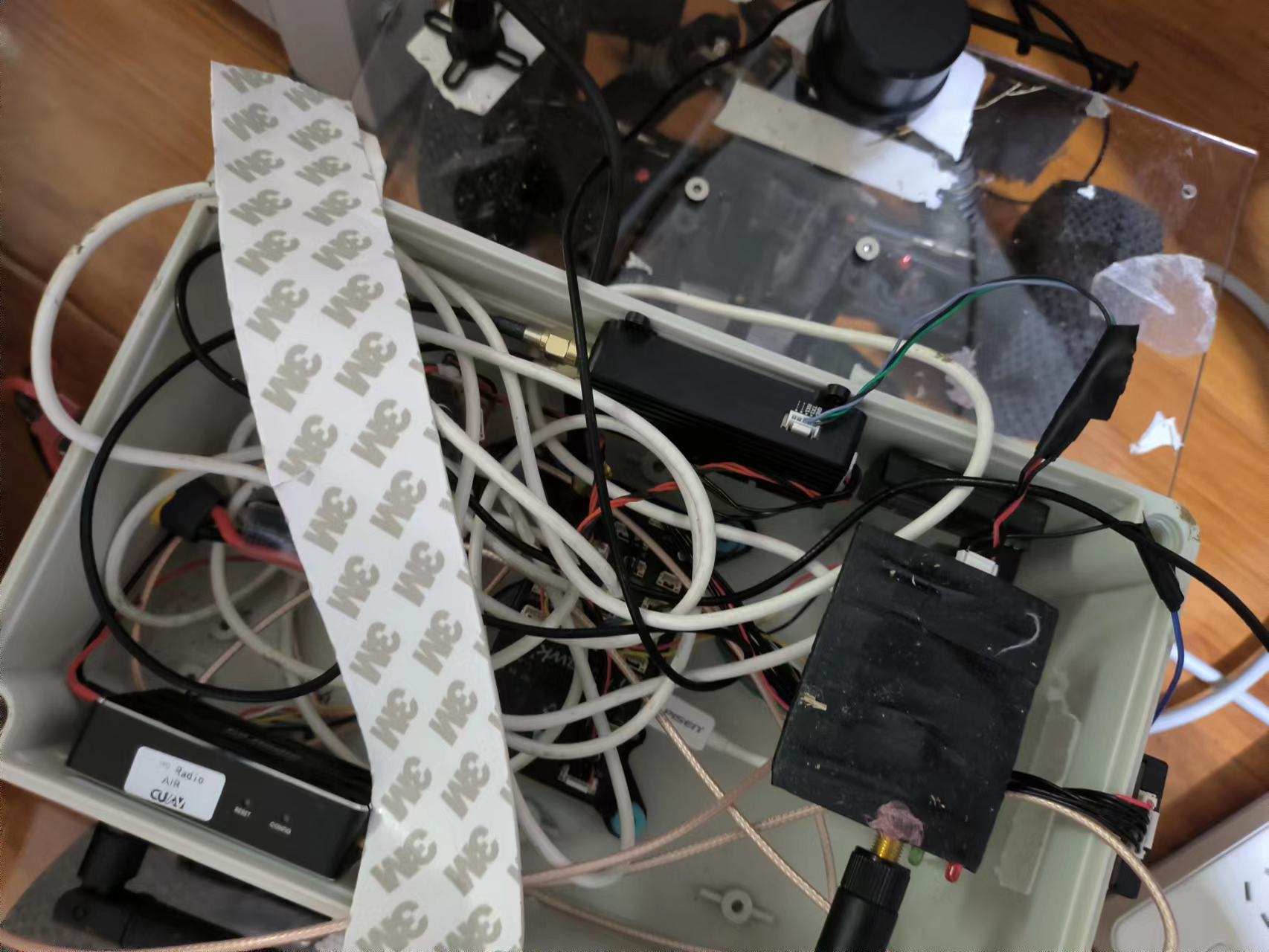
九、雷迅AIR LINK 4G数传
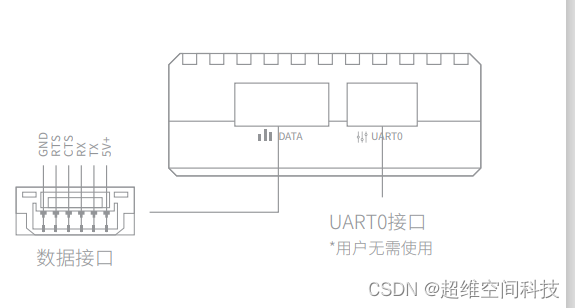
首先将数传插上一个能用的手机卡,然后用配线连接数传的DATA口和飞控的数传口
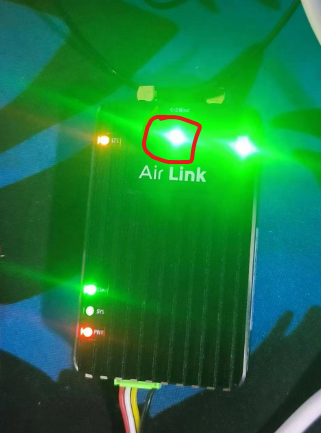
上电后等待一段时间,除了中间的Bind灯不亮。其他的灯显示如下,SYS灯以1Hz的频率闪。
安装非攻透传
https://doc.cuav.net/link/lte-link/zh-hans/feigong-transmission.html
打开非攻透传,注册用户
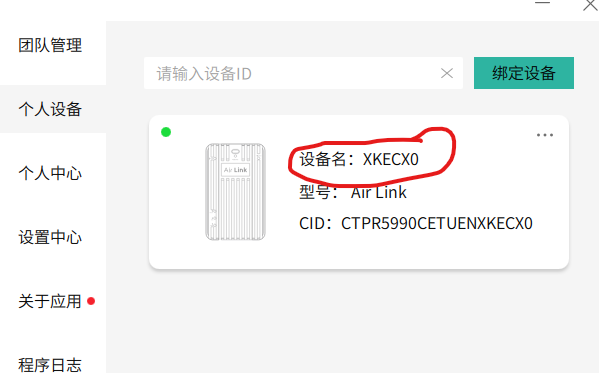
点击左上角,选择个人设备

输入设备id,然后点绑定设备

设备id在模块这个位置

点击绑定设备后,模块的bind灯会闪,此时按一下bind键,bind灯会变成常亮
软件上会显示添加的设备名
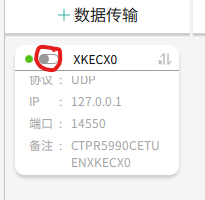
然后点击+数据传输

点击UDP(即使默认是UDP,也要点击下拉选择框,再选择UDP,否则无法选择设备),设置IP为127.0.0.1,端口为14550,设备为上面添加的设备,然后点击确定

最后点击添加的数据转发,把左上角勾选成绿色
再打开QGC,就可以自动连接上QGC了,QGC和非攻软件要运行在一台电脑上。注意飞控数传口波特率57600
十、火凤凰无刷电调
注意事项:
该电调最大支持3S,使用超过3S的电池会不工作
使用前先往左拨打开电调开关

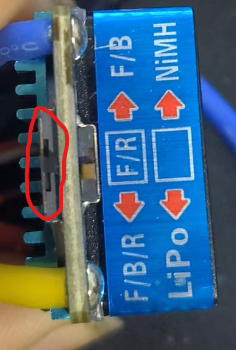
将电调的模式开关拨到中间,设置为(F/R)双向不带刹车
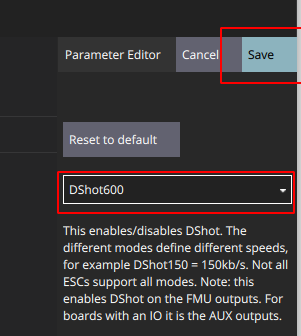
十一、Dshot电调
1.13.2及更早版本固件
设置DSHOT_CONFIG参数为:Dshot1200。
搜索SYS_USE_IO参数,禁用协处理器,如果有该参数,就置为0,然后将电调信号线接至FMU/AUX通道。如果没有该参数,则将电调信号线接至MAIN通道。
由于用的是Dshot协议,电调不用校准,将CBRK_SUPPLY_CHK置为894281。
如果想使电调的转向反向,可以在mavlink控制台上输入u以下命令:
以1号电机为例。
dshot reverse -m 1
dshot save -m 1
1.14.0及更新版本固件
1.14.0版本以后的固件没有DSHOT_CONFIG参数,如果想使用dshot协议,可以在地面站的Actuators页面,设置飞控对应通道为DShot协议,想反向的话,就勾选右侧的反向复选框

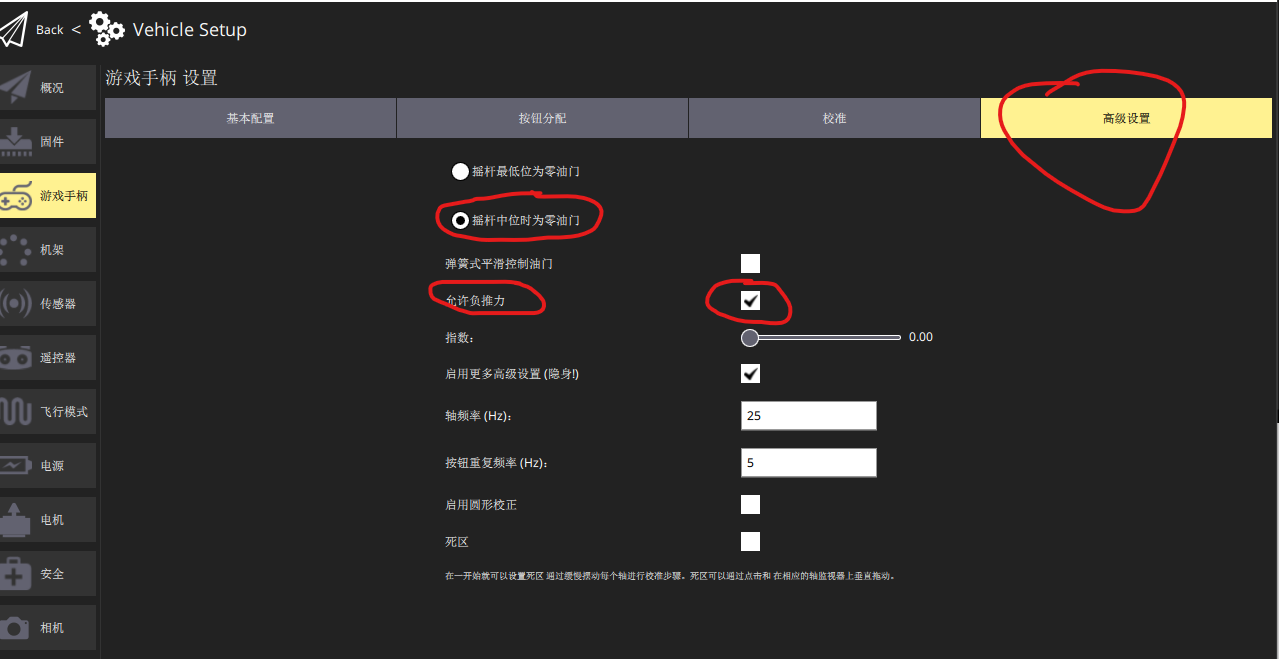
如果是无人船(车)并且点击支持正反转,还需要作如下设置,否则会没法反转
十二、凤凰模拟器
下载地址
链接:https://pan.baidu.com/s/1yvmnPsvFeDp9RluFQmA2Bw
提取码:oyib
–来自百度网盘超级会员V5的分享
下载完之后安装
如果打开后报错:
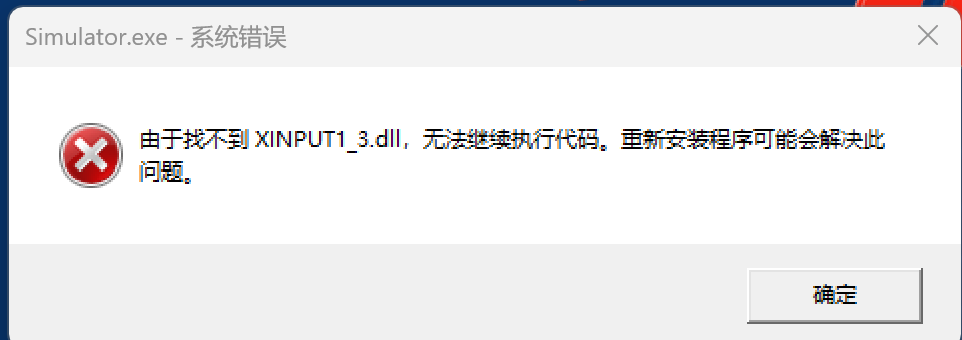
点击桌面的下图软件修复

然后将加密狗的开关拨到PHRC档

将线连接遥控器和加密狗,打开遥控器,然后将加密狗查到电脑上,打开凤凰模拟器,就可以模拟飞行了。可以在这个选项设置机型

十三、雷讯F9P RTK
说明文档
https://doc.cuav.net/gps/c-rtk/zh-hans/c-rtk-9p/user-guide-for-px4.html
基站端接上天线,然后用USB接到电脑上,打开QGC,会看到下面的红色的RTK图标
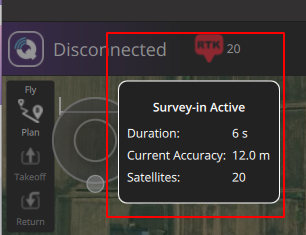
将RTK基站放到空旷的地方,一段时间后,图标会变成白色,表示地面地面站可以开始转发差分数据
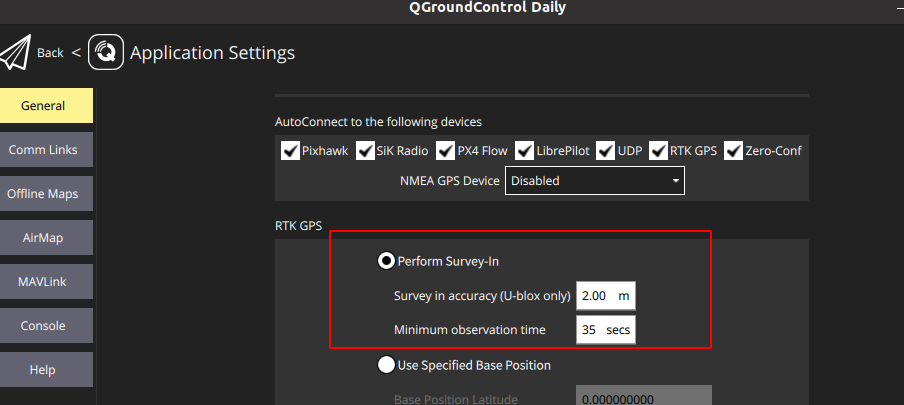
在QGC的软件设置->general的RTK设置页面设置过程的最小持续时间(应设为40s或者更小)和最小精度(应设为2.5或更小)。
然后将移动站接到飞控的串口上,我这里接到了PIXHAWK2.4.8的SERIAL4/5上,接VCC,TX,RX,GND四根线即可,t和r对接。
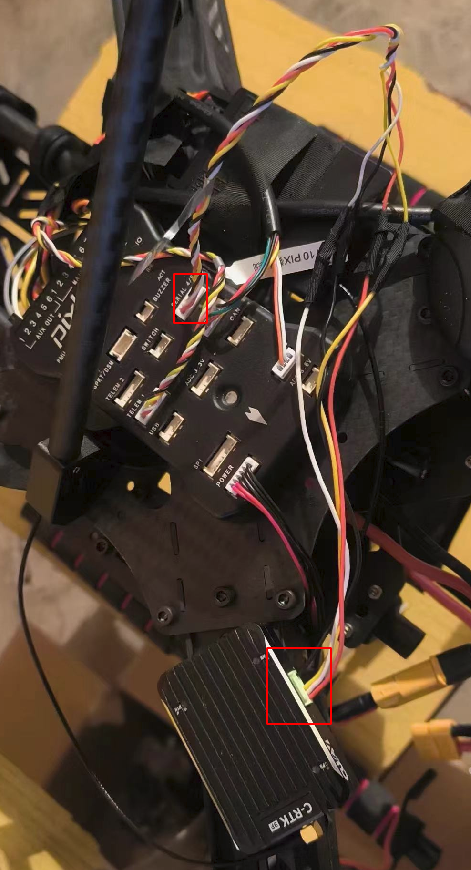
QGC设置GPS_1_CONFIG的端口为TELEM/SERIAL4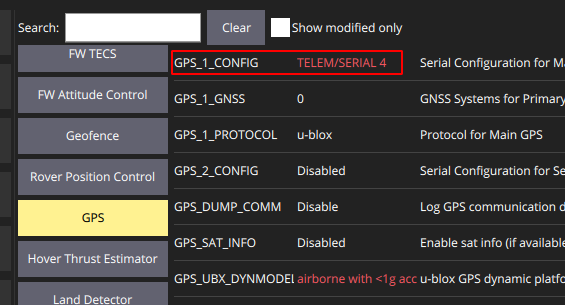
设置SER_TEL4_BAUD为Auto

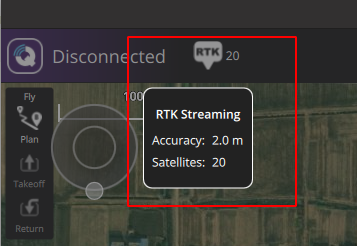
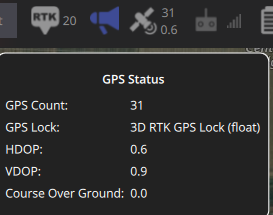
然后将飞控接到QGC(注意上面的RTK图标是白色),可以看到定位状态变成了RTK
RTK定位精度较高,可以将EKF2_GPS_V_NOISE和EKF2_GPS_P_NOISE减少到0.2。
十四、火凤凰新版120A,强化速龙120A无刷电调

设置流程如下:
先插上电池,然后关掉电调的开关,长按开关旁边的设置按键,然后打开开关,按键一直不要松,过一段时间后,电调会响一下,这个时候可以设置运行模式,如果要设置运行模式就可以在这时候松掉按键。如果要设置其他的基本设定项目,继续长按按键,直到响两下、三下以此类推设置后面的基本设定项目。以设置运行模式为例,松掉按键,然后短按按键设置运行模式,船的话设置成直接正反转,也就是电调连响三声的时候,然后关掉开关重开即可生效。此外船的最大倒车力度需要设置为100%。
十五、北天ZED-F9P RTK使用yeecom 4gdtu模块实现网络差分
资料链接
链接:https://pan.baidu.com/s/1QTP54f0TesHv3KJIHEczkQ
提取码:3ixx
–来自百度网盘超级会员V5的分享
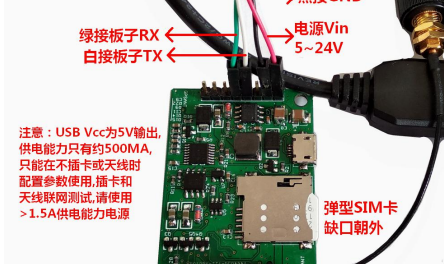
模块接口图如下
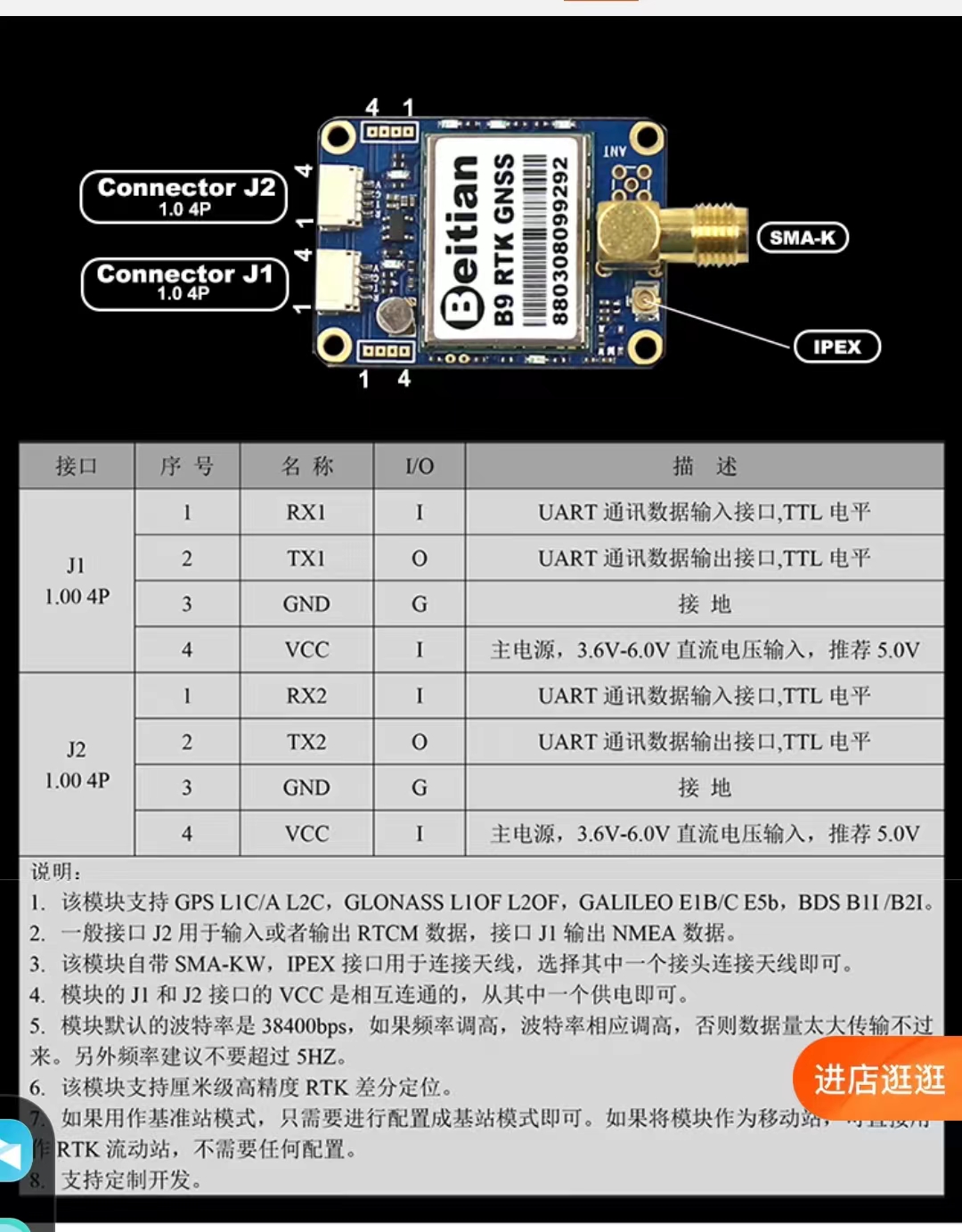
模块默认的波特率是38400
J1口和J2口上面各有一个led灯,灯闪的频率代表模块向外发送数据的频率。
默认J1口向外发送NMEA数据
将J1 口通过USB转串口模块接到U-center。
设置好端口和波特率,.打开菜单栏 View-Text Console 窗口,可以查看 GPS 的 NMEA-0183数据,如果J1口的灯在闪,但是Text Console 窗口却没有数据,可能是波特率不对,尝试更换其他波特率。
设置RTK
如果Text Console 窗口有数据,说明和ucenter连接正常,可以设置RTK。
设置模块NMEA输出频率10Hz,
DTU模块需要发送一帧GGA语句才可以发送差分数据,DTU接到RTK的J2口,而J2默认不输出GGA语句,所以需要设置RTKJ2口输出GGA语句。
注意RTK设置完要在CFG里保存,不然重启后不生效
PX4参数设置
模块的J1接飞控GPS口,注意飞控的TX和RTK的RX不要接,因为飞控会发送配置指令给RTK,导致RTK的J2不输出GGA语句。
飞控的GPS协议设置为NMEA(默认为UBX),并且使用修改后的可以支持NMEA协议的PX4固件。
DTU模块设置
用底板供电,将底板的串口1通过USB转串口接到上位机软件,选择端口会自动连接,默认波特率115200.
可以点击设置波特率的按钮,查看模块的返回信息,正常返回说明连接成功,如果提示串口位2打开,可以尝试重启软件。模块的波特率要设置为和RTK端口的波特率一致。
流量卡缺口朝外,不要插反
设置千寻账户可参考模块的说明书,设置时要插卡接上天线,用5V BEC供电。我这里设置的信息如下:填完点设置按钮设置即可
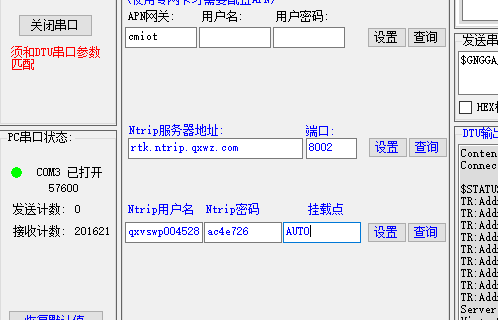
设置完成后正常的话状态信息会显示为6001
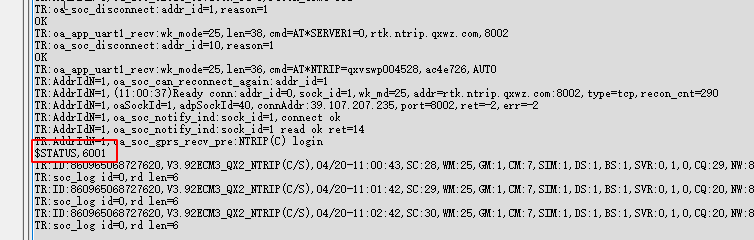 最后模拟发一个GGA语句,能不停返回差分数据,就是正常的。
最后模拟发一个GGA语句,能不停返回差分数据,就是正常的。
$GNGGA,081102.00,3309.1955051,N,11855.6059467,E,1,07,1.26,13.662,M,2.378,M,,*46

然后把模块(不要底板)的TX1和RX1接到RTK的J2,模块可以用BEC 5V供电,不要用RTK供电。
过一会RTK的FIX灯长亮就表示进入了FIX状态
十六、光流
硬件:
pix2.4.8
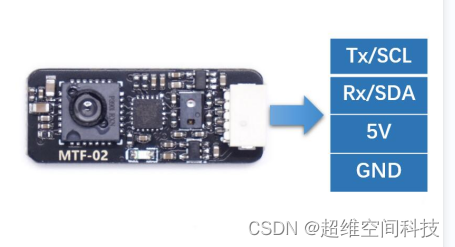
微空MT02
软件:
PX4 1.13.3
资料网盘链接:
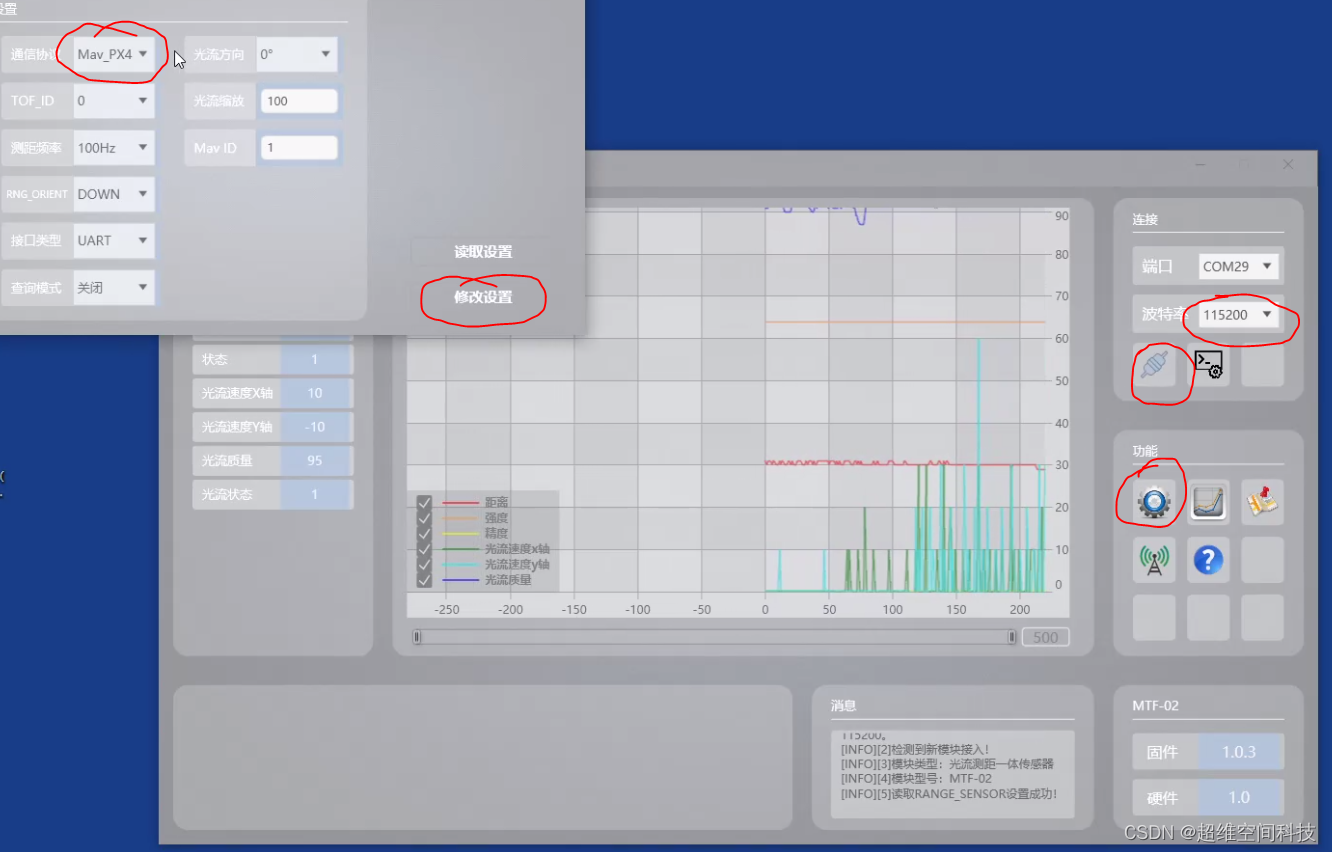
修改光流设置
将光流通过usb转ttl模块接到配置软件上,模块的线序定义如下:
然后选择模块端口,波特率115200,然后点击连接按钮,连接上后可以看到模块数据,点击设置按钮,设置通信协议为Mav_PX4,点击修改设置。
修改飞控设置
修改mavlink参数如下:先设置MAV_1_CONFIG的端口,然后重启飞控,才可以设置剩下的参数
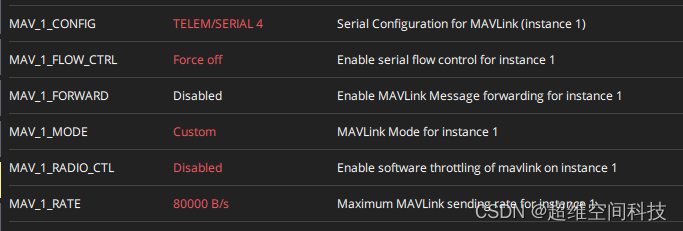
设置端口波特率为115200,然后重启

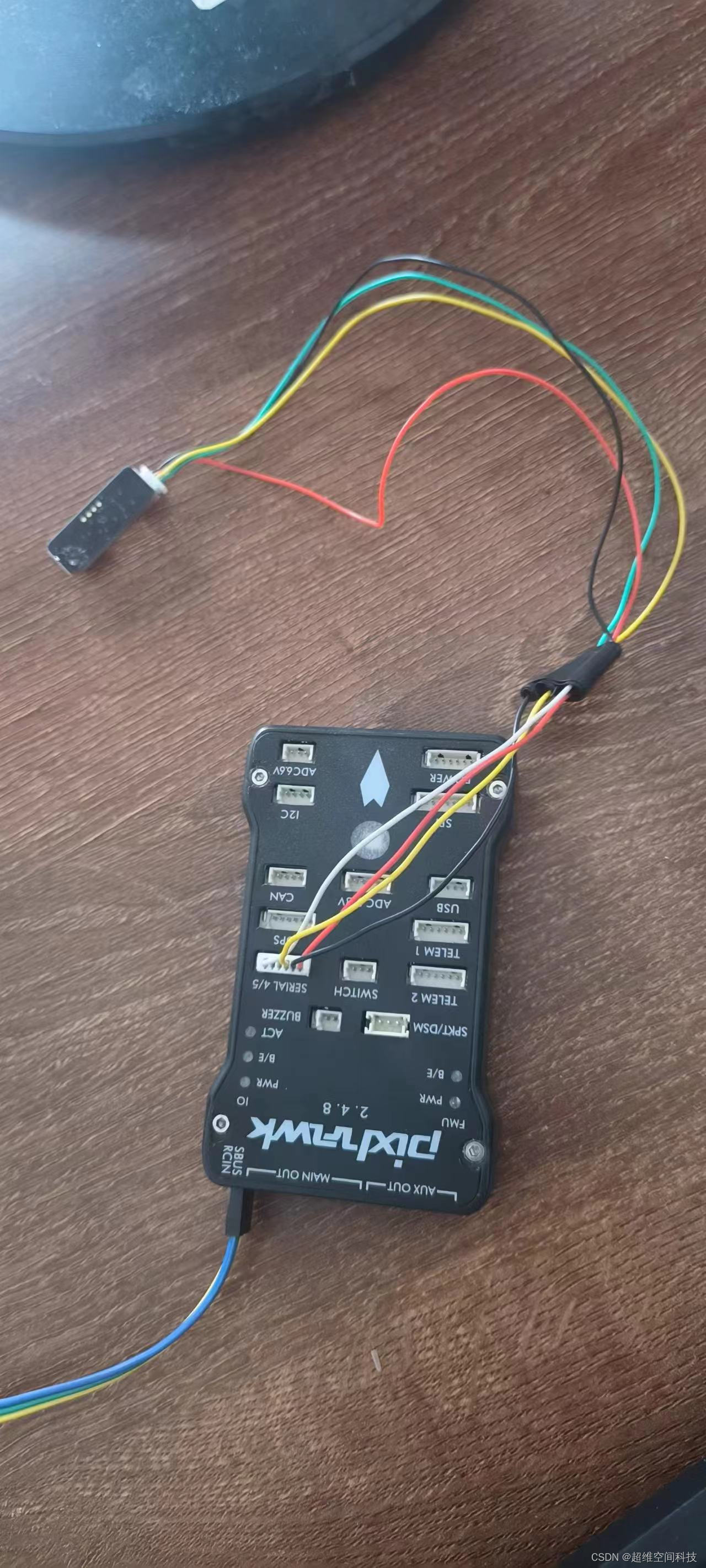
然后将模块接到飞控的SERIAL4/5口
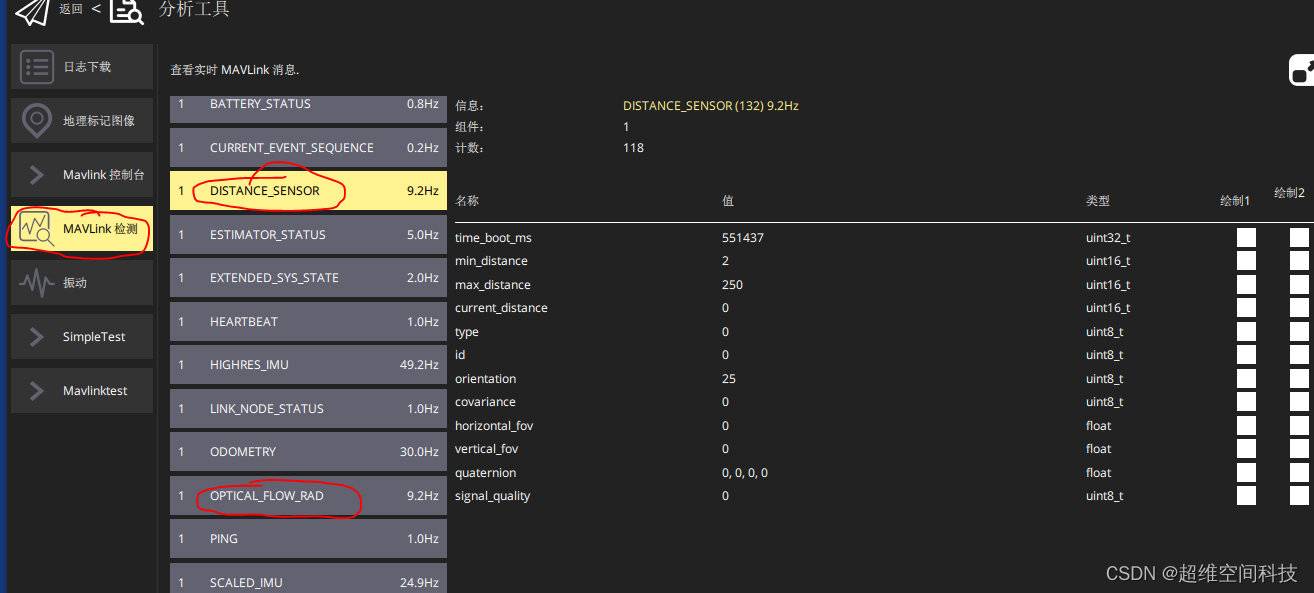
连接飞控到地面站,正常的话可以看到测距和光流的数据
然后修改飞控设置:
将水平定位来源设置为光流
将垂直高度源设置为Range sensor
MT02的盲区是0.01米,所以设置EKF2_MIN_RNG为0.01

MT02的误差在2%,室内一般在一米左右的高度飞,我这里的误差设0.03

MT02输出频率是100hz,这里设置10ms。

如果模块安装不在正中心或者不平,需要设置下面的参数

光流的安装方向,根据实际设置,建议安装在正方向,这里设置成No rotation

光流正方向如下:

十七、纳雷毫米波雷达
无人船使用毫米波雷达实现避障功能教程
APM固件4.4版本6C或2.4.8飞控
先将TX和RX线路使用TTL转USB连接电脑
供电采用12V稳压模块供电GND和VCC连接稳压模块

连接电脑后使用任意串口助手查看雷达输出是否正常
正常输出显示如下图:

显示输出正常后,退出串口助手,解压网盘中的压缩包,打开纳雷科技上位机(注:一定要退出串口助手,串口助手打开会冲突)



打开纳雷科技上位机后,雷达型号选择MR72,选择COM口串口号选择对应串口然后点击连接,出现下图右侧的数据后正面雷达可以正常识别到数据

在测试雷达能正常识别数据后,点击断开连接,随后点击雷达升级,选择雷达型号MR72,连接方式选择COM,串口号选择对应串口串口号,随后先点击获取,获取对应的版本号,若是不为3.2.0则选择网盘中下载的固件后点击升级等待升级完成后,重新上电重启,再次获取版本号,显示3.2.0则代表升级成功。

固件升级成功后将TX,RX通讯线连接到飞控接口 Telem1/Telem2/GPS2,对应搜索Serial1/Serial2/Serial4,波特率设置为 115200bit/s,通信协议设置为 Lidar360。
我这里选择的是GPS2口,设置如下图:

设置完成后串口波特率和通讯协议后设置避障传感器协议(PRX_TYPE 设置为 6)
如下图:

随后设置避障动作方式为停止(AVOID_BEHAVE 设置为 1),
gps 模式下避障距离为 3m(AVOID_MARGIN 设置为 3)
如下图:

全部设置完成后保存并重启飞控,随后可以在传感器数据中查看避障信息
角度可以选择(0,45,315),如下图:

也可以在视频中直接查看避障数据,
如下图:

常见问题
(1)MR72 只能单向避障吗?
答:在开源飞控平台,由于受到飞控接口设置和处理能力,MR72 目前只支持
单向避障(前向避障);如需多雷达避障,需自行进行开发
(2)MR72 避障距离和安装问题?
答:雷达的安装需要考虑航行避障和悬停避障无人机造成的角度变化,考虑
到雷达视角范围特性,同时由于雷达数据传输无人机制动存在延时情况,为保证
无人机飞行安装需控制到飞行速度和延时造成的制动距离
十八、元厚HXF260测深仪
1.测深仪命令列表

2.打开测深仪,显示内存卡图标,表示测深仪自带内存卡未损坏

3.将测深仪自带的内存卡拔出,使用读卡器连接电脑,内存卡自带Xlogger.cfg文件,使用文本文件打开可以更改(另外机器要断电内存卡插拔,不支持热插拔,时间长了容易损坏内存卡文件系统。)

4.如果自带内存卡损坏或无法正常使用,可以使用32G以下的其他内存卡代替,先将内存卡文件系统格式化为FAT32,再将卡插入机器会自动创建配置文件

5.连接飞控时修改参数,DT_FMT连接飞控时建议更改为DBT,其他修改如下图(其中波特率需修改为115200或更低)

DB9是标准RS232接口,我们使用的北天UM982RTK电平为TTL电平,需要使用232接口转换,可以使用杜邦线连接两头TX,RX,GND。(TX,RX需交叉,232模块需要供电)

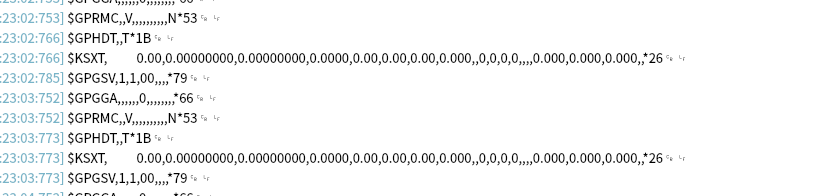
标准版固件和定制版固件RTK发送信息设置区别
定制版固件升级后只解读PYRMC,如RTK无法发送PYRMC数据会导致无法接收到RTK数据。定制版固件需要GPRMC和GPGGA。
下图为RTK发送数据(标准版)

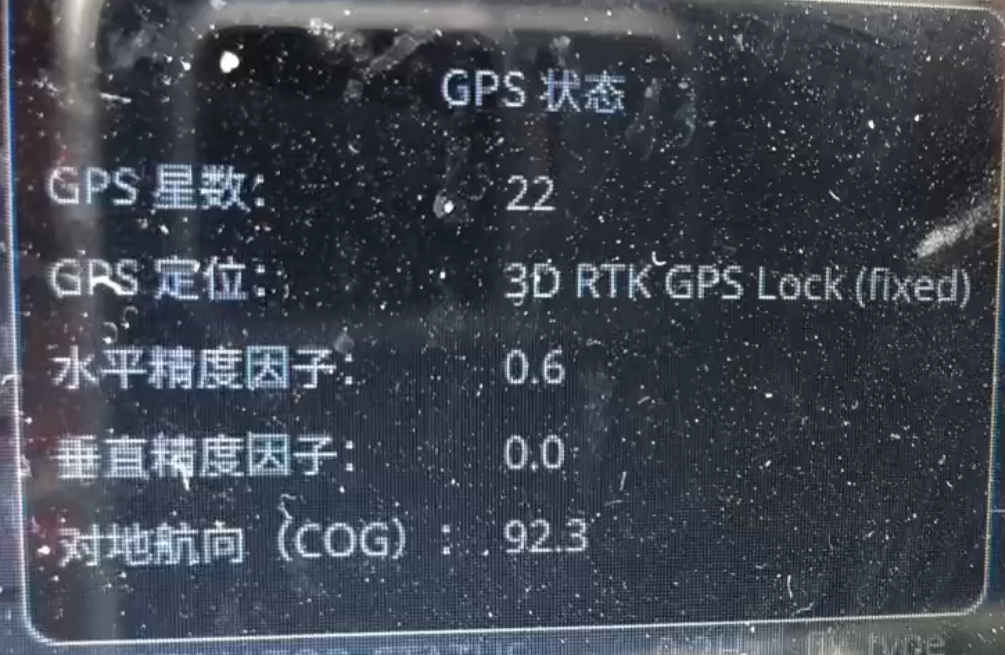
配置完成后,在室内连接RTK后会出现WAIT标志,标志出现后说明RTK与测深仪通讯正常,然后可以去户外等待RTK信号锁定后屏幕上会出现经纬度,如下图

教程及后期处理文件
通过百度网盘分享的文件:测深仪
链接:https://pan.baidu.com/s/16Kt1VvqW78OdSHQPfYHVkQ
提取码:cwkj
–来自百度网盘超级会员V4的分享
十九 BL32飞盈佳乐电调参数配置教程
1.下载BLHELISUITE调参软件
官方下载连接:https://www.mediafire.com/folder/dx6kfaasyo24l/BLHeliSuite
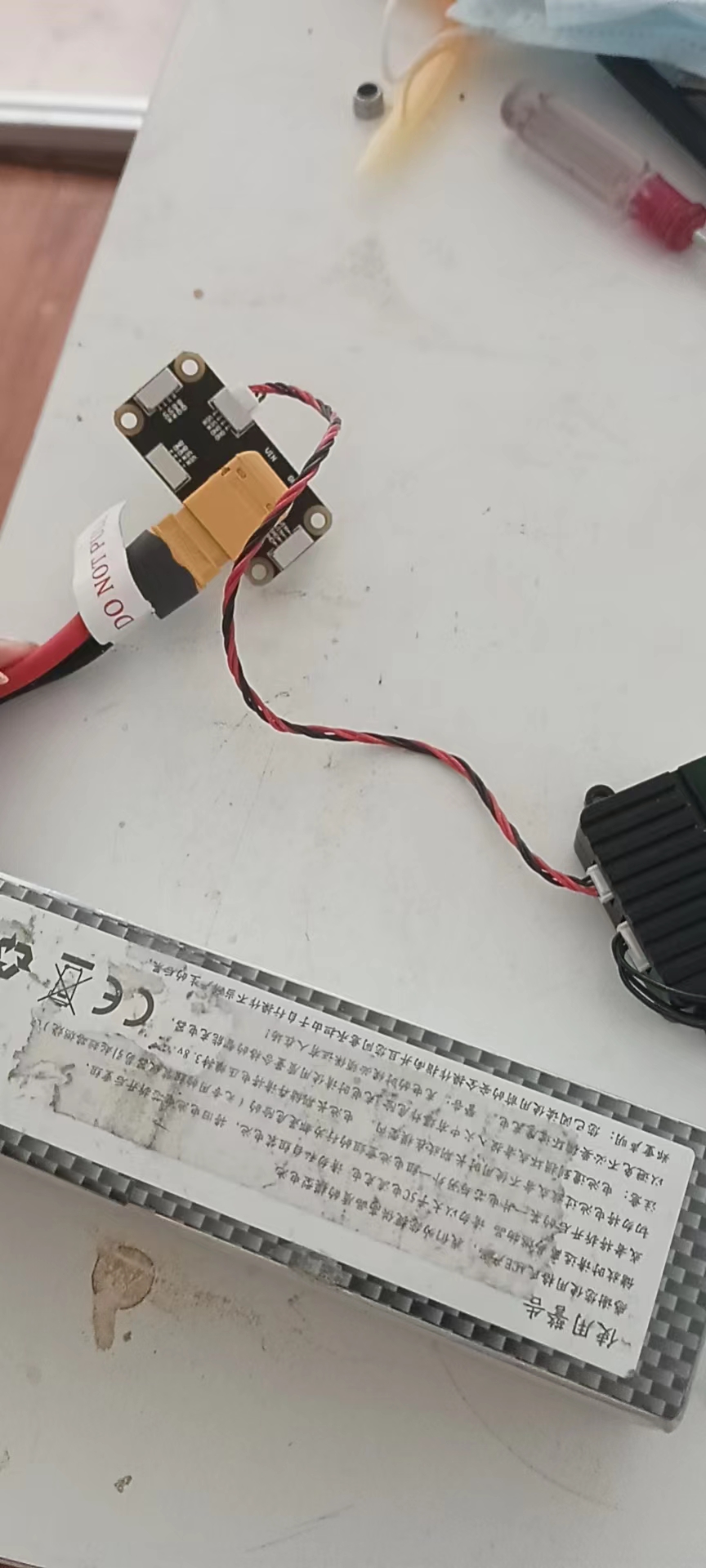
2.将电调和调参器连接并通电(如下图)

2.使用调参器连接电脑打开 BLHeli 软件,在 Select BLHeli_32 Interface 选项中选择 L BLHeli32Bootloader(USB/Com)选项:
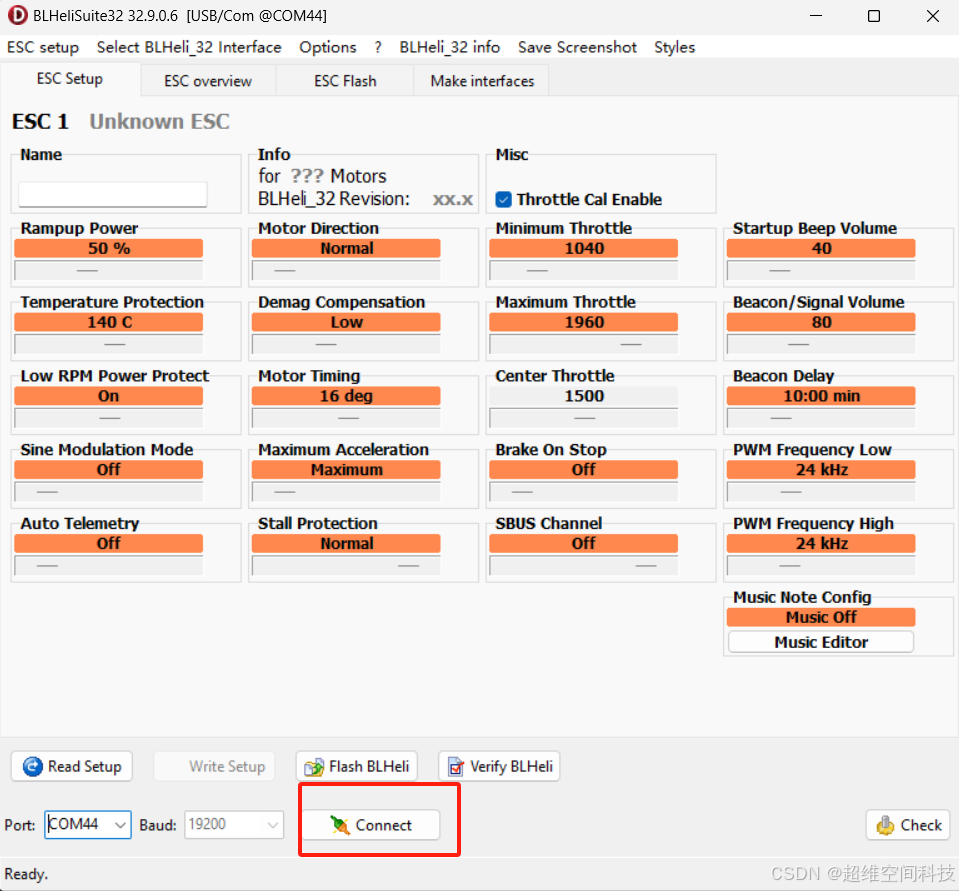
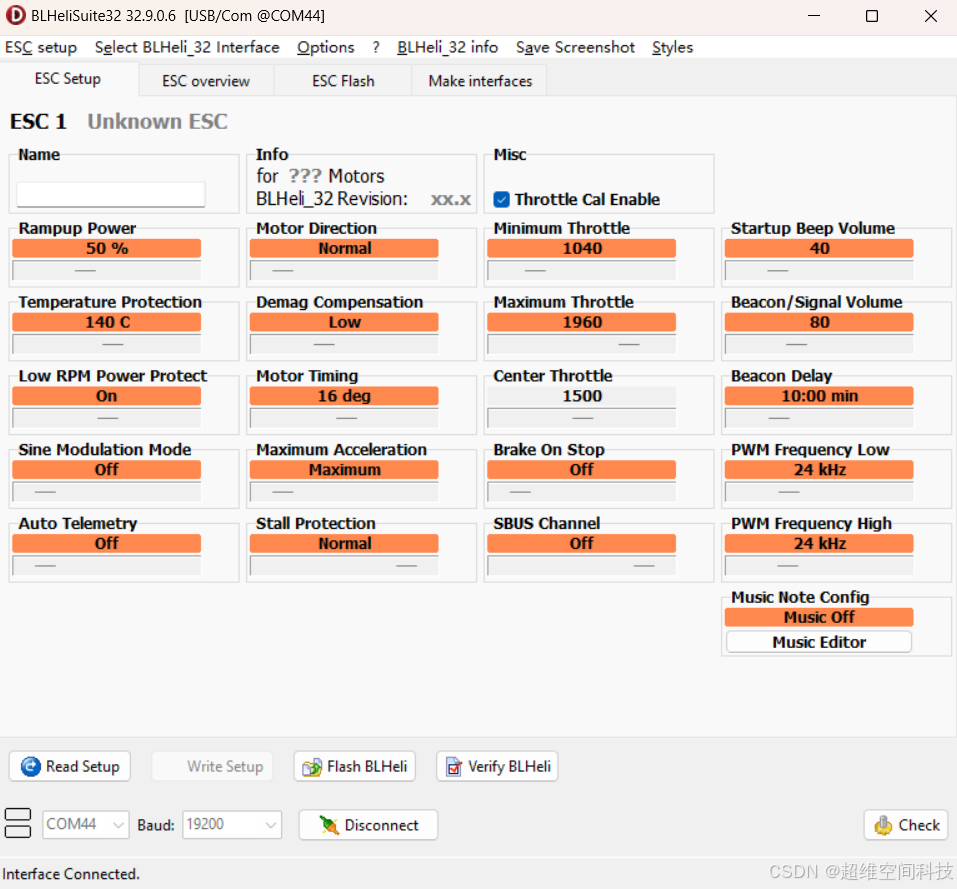
3.将电调与烧录器(nano 板)连接,同时给电调供电,选择端口,再点击Connect 连接后变成 Disconnectl:
1.首先点击connect等待20秒左右
2.在connect变成disconnect后点击read setup读取电调(如下图)
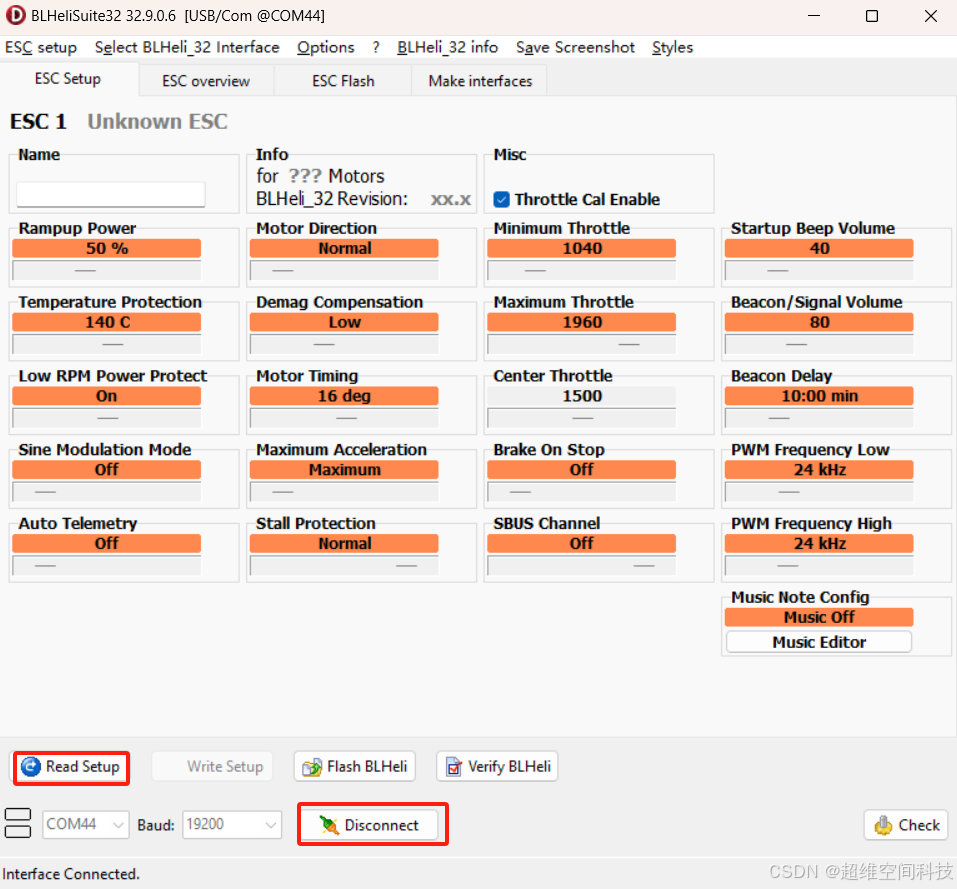
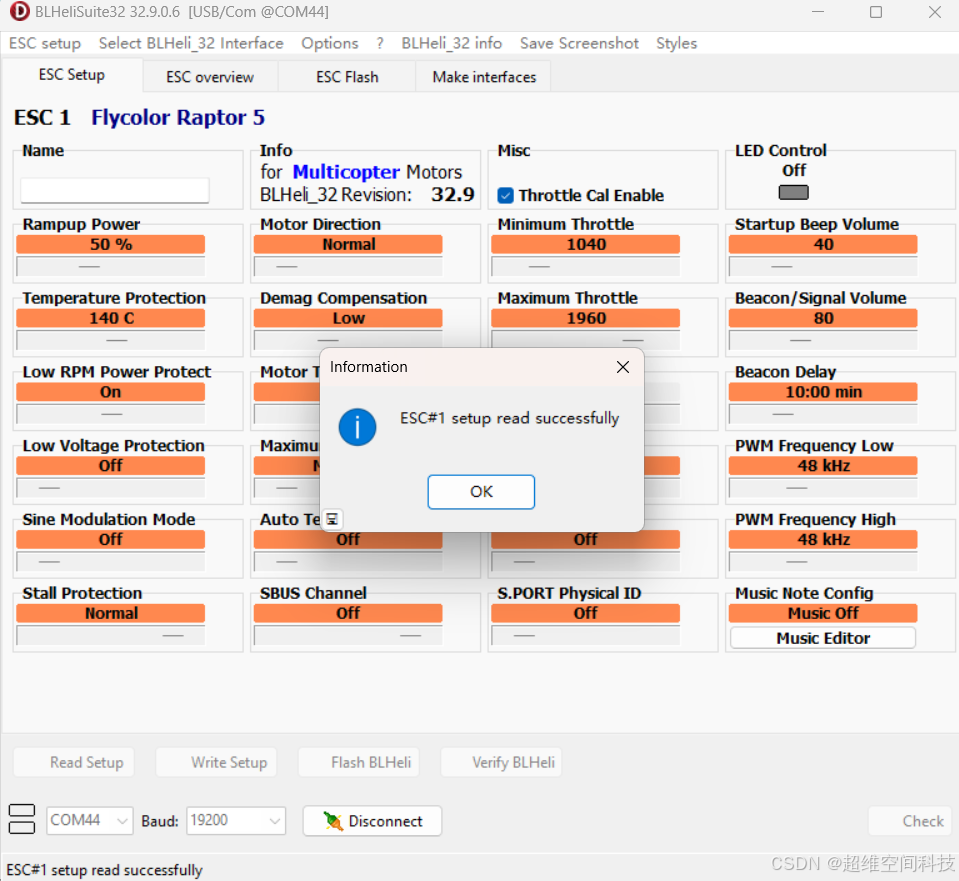
4.点击 Read Setup 读取此电调,读取成功后会弹出窗口(如下图),点击 OK。
5.如果无法连接(可能有以下原因)
1.使用的电脑问题,可以更换电脑再尝试设置。
2.检查电调是否供电(或者供电是否正常),以及电调和 电调调参器(NANO 板)有无损坏。
6.参数介绍
1.Rampup Power(启动强度),选择缓慢启动和还是暴力启动,此选项仅影响启动瞬间,其它操作不干涉。
2.Temperature Protection(温度保护),一般选择默认值。
3.Low RPM Power Protect(低转速保护),一般设置默认即可。
4.Sine Modulation Mode(正弦调制模式)默认即可。
5.Auto Telemetry(自动遥测)默认即可。
6.Motor Direction(调节电机转向)如现在电机是顺时针旋转,需要改成逆时针,默认设置是 Normal(正常),那就需要改成 reversed(反向)即可。
7.Demag Compensation(消磁补偿),弗兰奇固定翼电调一般选择关闭OFF。
8.Motor Timing(进角)简单讲就是将进角设高,在相同的油门、电压,转速会更高,但效率降低,将进角设低,在相同的油门、电压,转速会更低,但效率提升,Auto 自动进角,就是尽最大的可能去提高效率(32 位电调的独有功能),或者根据自身需要去调节。
9.Maximum Acceleration(最大加速度)一般用%来表示,如设置为 10%油门最大允许的加速度在每毫秒提升 10%,Maximum 是尽最大可能将加速度提升到最大(建议新手尽可能的调低一点)。
10.Stall Protection(失速保护)默认即可。
11.Minimum Throttle(最低行程)一般设置和飞控设置的一致即可(要确认飞控里设置是否正常,一般设置 1000 或者接近 1000 即可),固定翼没有装飞控设置默认即可。

12.Maximum Throttle(最高行程)一般设置和飞控设置的一致即可(要确认飞控里设置是否正常,一般设置 2000 或者接近 2000 即可),固定翼没有装飞控设置默认即可。
13.Center Throttle(中位行程)一般默认中位 1500 即可。
14.Brake On Stop(停止时刹车)一般电调都是默认带刹车的,刹车不是说在飞行过程中完全刹停(桨叶停转),而是当你杆位回中时会带有一定的阻力去帮助你,刹车值用%来表示,值设置越大阻力越大,根据自身需求去设置。
15.SBUS Channel 一般默认即可。
16.Startup Beep Volume(启动音强度)给飞机上电后电调通过电机发出的提升音的音量,不建议设置太高,默认 40 即可。
17.Beacon/Signal Volume(警报音强度)比如警报音(静止一段时间不操作电调会通过电机发出警报音),默认 80 即可。
18.Beacon Delay(警报音延时),如设置为 2:00min,飞机通电后静止2min 不做任何操作电调就会通过电机发出警报的声音,一般默认即可。
19.PWM Frequency(PWM 频率),频率设置按自身需要去调节(建议不宜调节太高),一般默认即可。
20.PWM Frequency(PWM 频率),频率设置按自身需要去调节(建议不宜调节太高),一般默认即可。
21.Music Note Config(启动音设置)可以设置你需要的启动音。
7.驱动程序下载
CP210X驱动程序:
https://kdocs.cn/l/siRsogVvfhUp
CH340X驱动程序:
https://kdocs.cn/l/cvL67b8cfZ3G
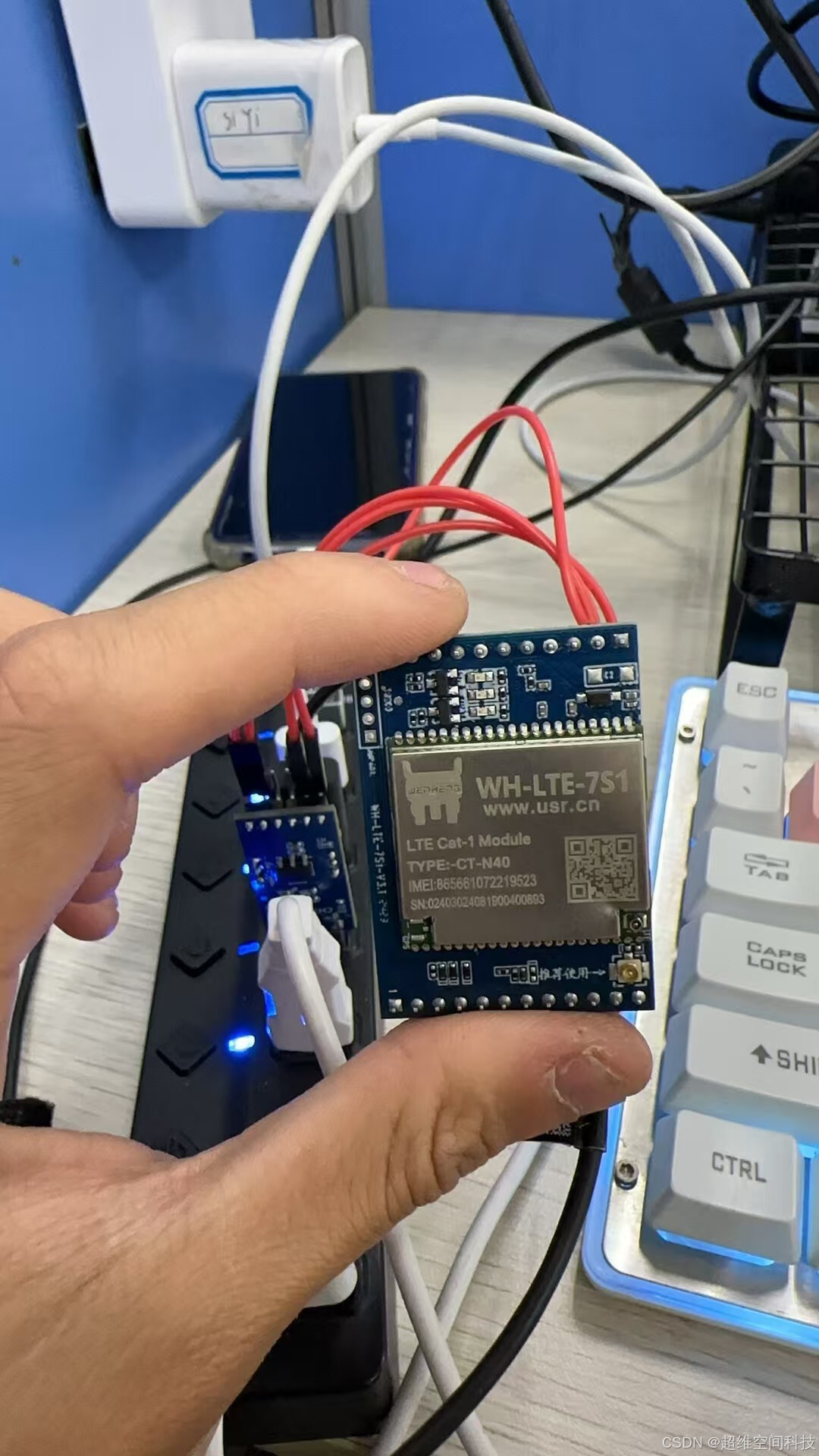
二十、yeecom 4g模块
这个4g模块同时支持ntrip功能,详情见第十五章
模块资料:
通过网盘分享的文件:YeeCom
链接: https://pan.baidu.com/s/1INihs3goaXVoycOqkE9k2g?pwd=cxw4 提取码: cxw4
–来自百度网盘超级会员v7的分享
二一、有人4g模块
1.参考接线图(图1,图2)连接4g模块和ttl转usb接口
(图1)

(图2)

下载模块调试软件
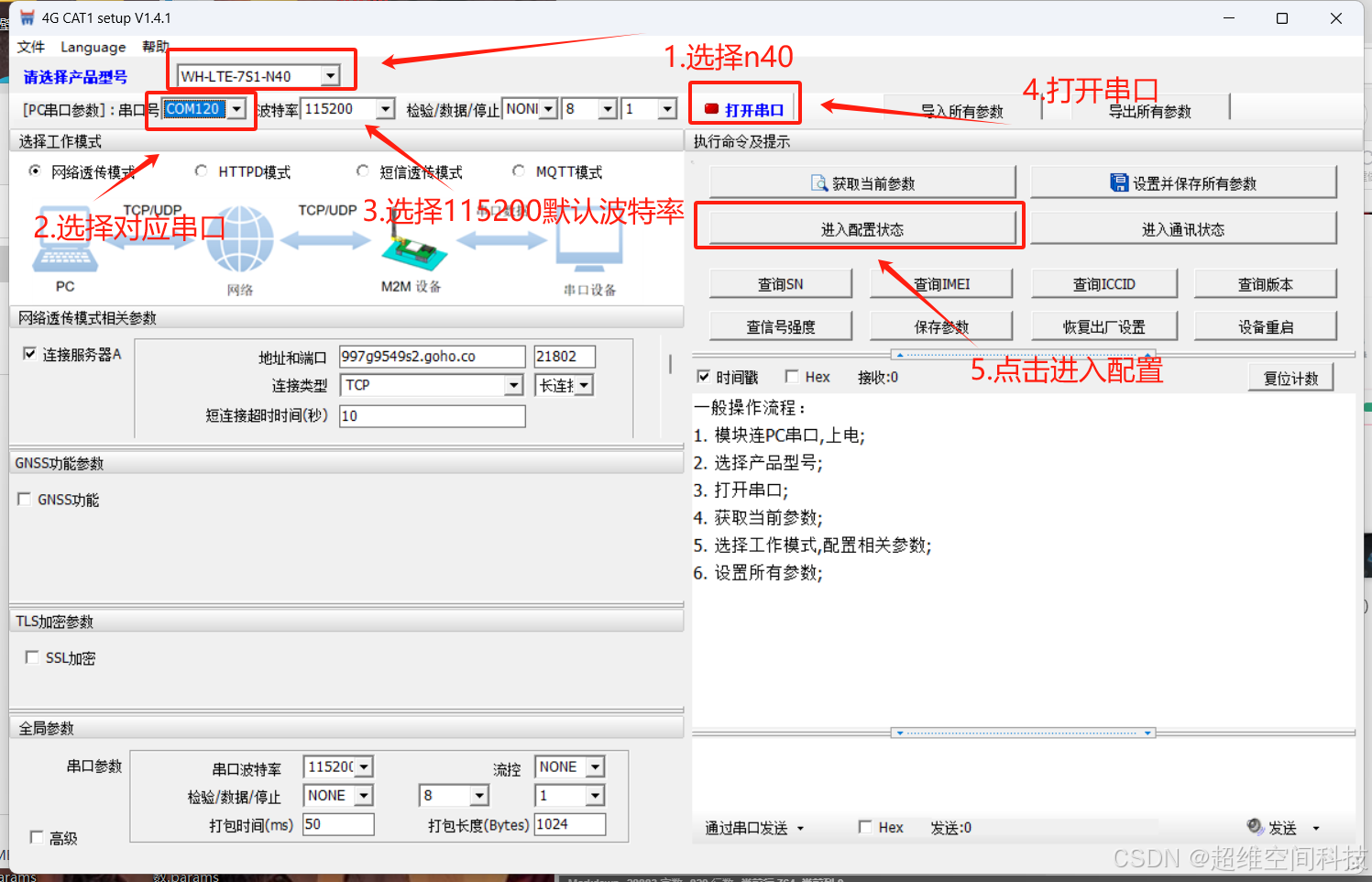
下载地址https://www.usr.cn/wiki/mobile/puba/bPSCDrZBW
进入网站后从左侧选择(设置软件中——下载连接——进入官网——下载)


搜索下载贝锐花生壳

下载有人虚拟串口软件
下载连接https://www.usr.cn/Product/72.html
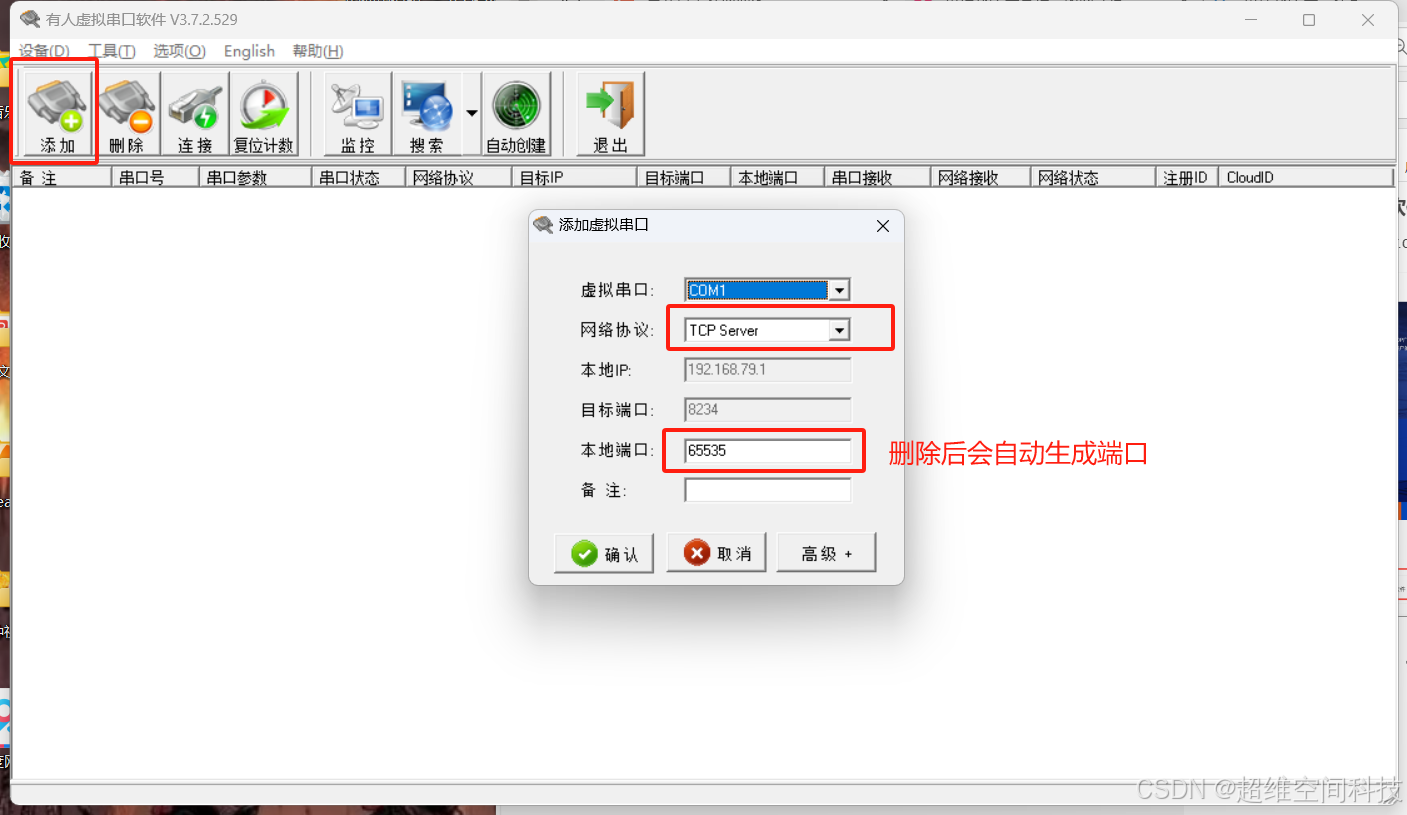
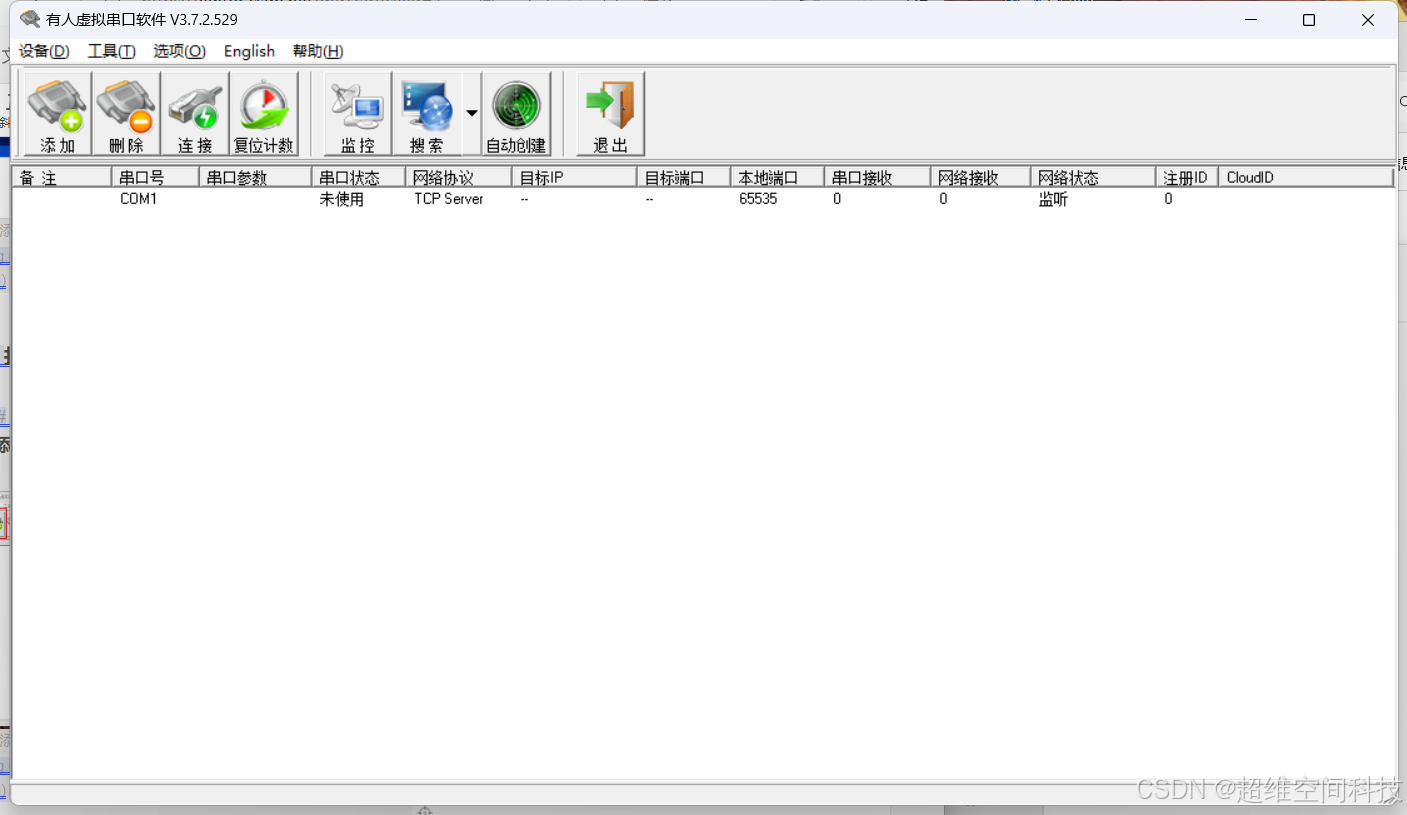
打开虚拟串口软件,设置虚拟串口
点击添加,网络协议选择TCP Server,点击确认添加。
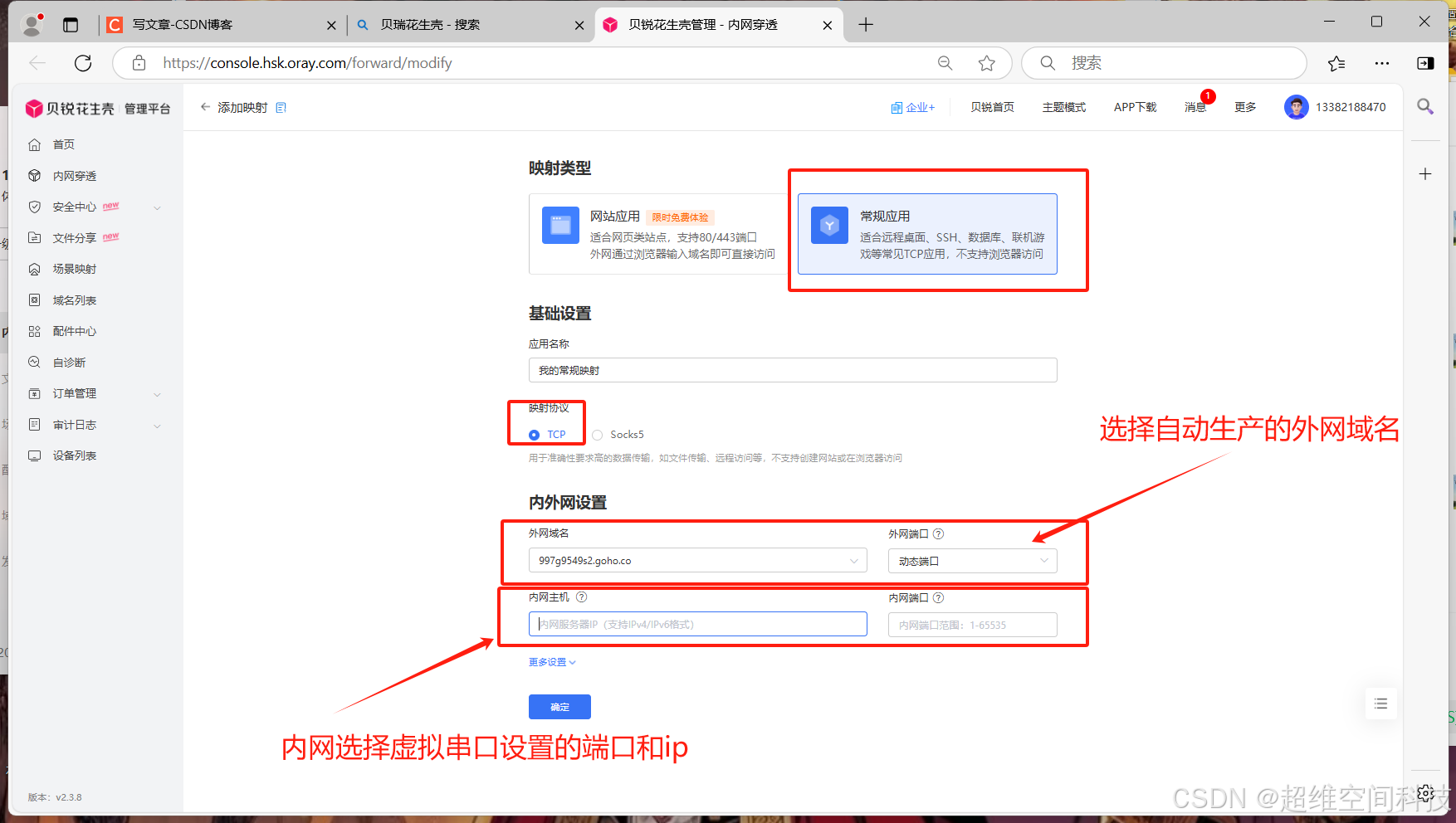
打开贝锐花生壳,添加映射

查看是否通讯正常

(如果通讯有问题检查地址和端口是否正确)
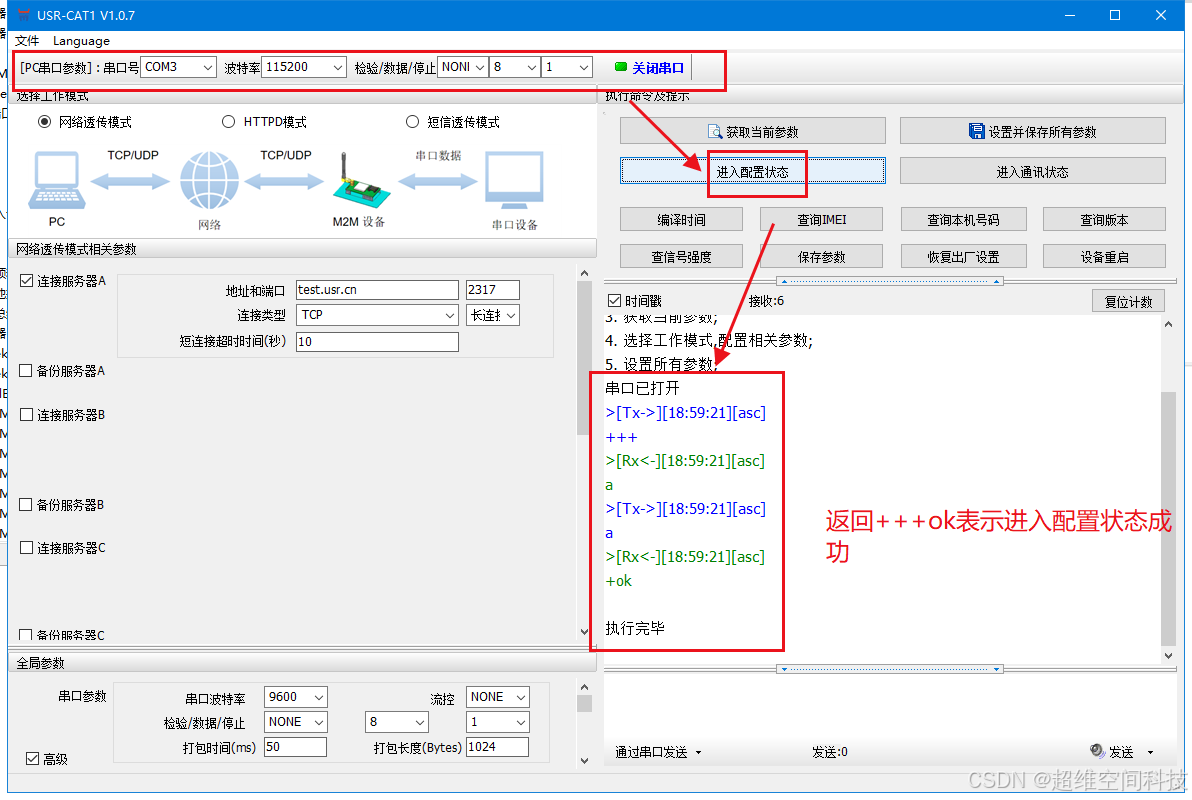
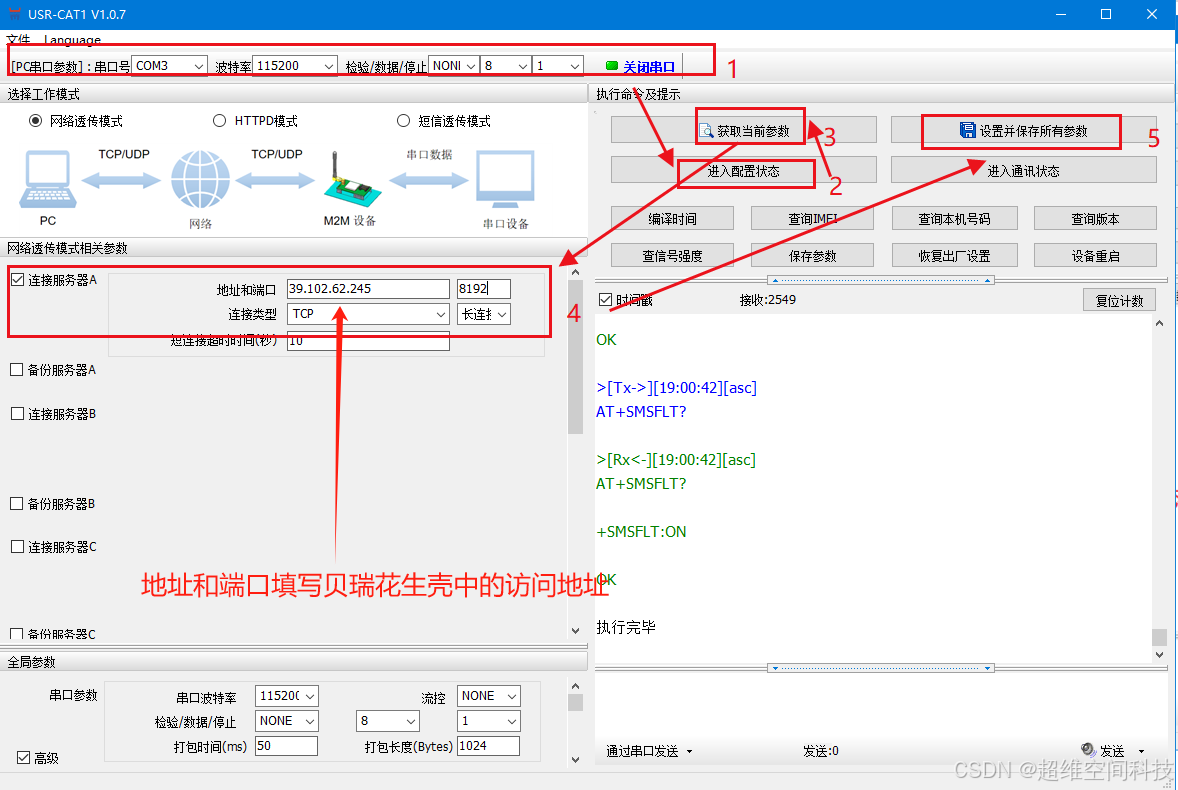
打开有人配置软件配置4g模块
配置完成打开超维空间地面站设置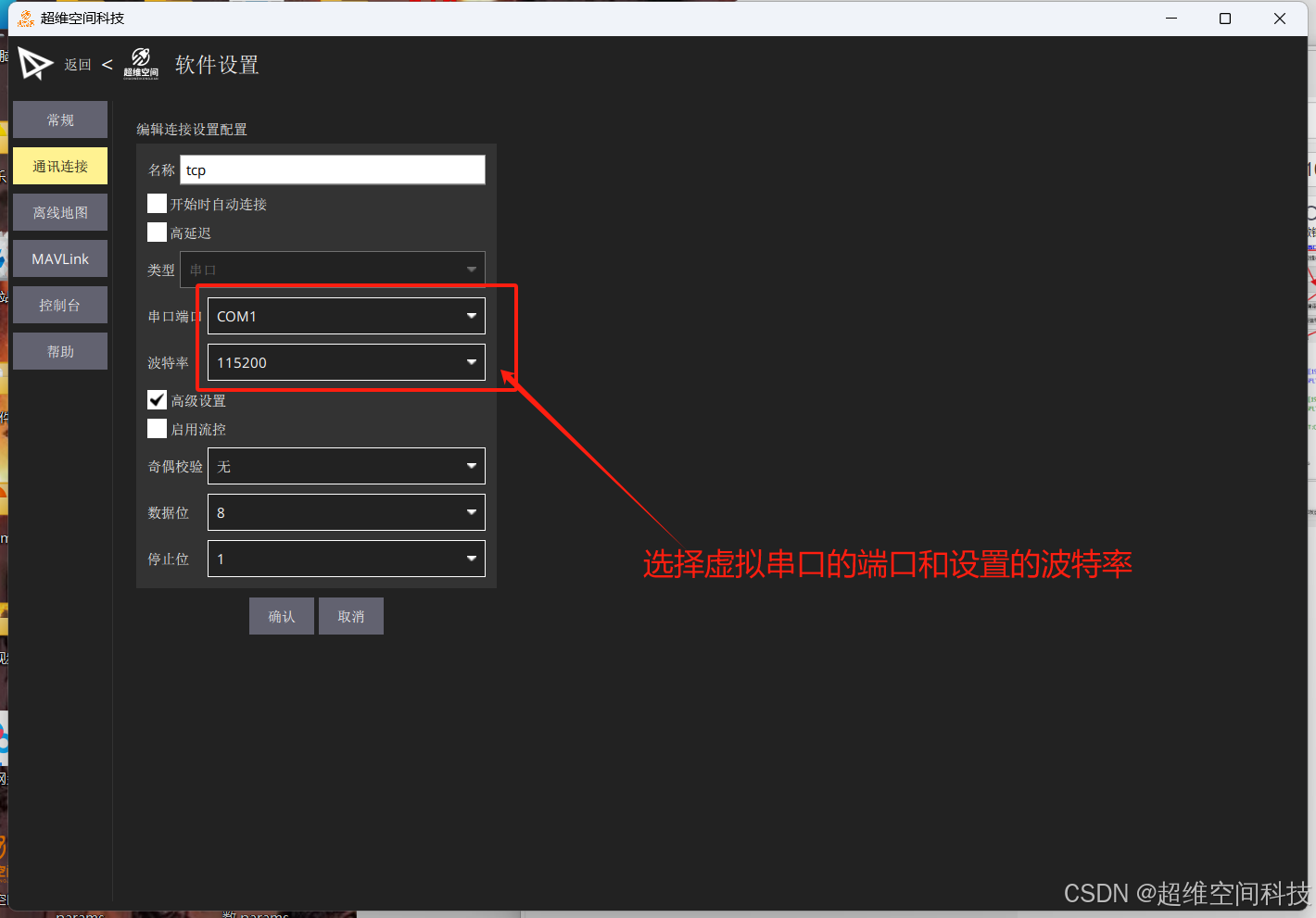
设置完成后将4G模块连接到飞控对应串口,可以成功连接到电脑地面站即为设置成功
先飞D80Pro吊舱
吊舱文档
通过网盘分享的文件:先飞D80pro
链接: https://pan.baidu.com/s/1BhI2o1cBY7udo2iHFA8F-g?pwd=cdps 提取码: cdps
–来自百度网盘超级会员v7的分享
吊舱的供电范围14~53 VDC。
GCU 和吊舱连接。GCU的网口通过配套的转接线接电脑,GCU的uart2通过配套的线连接到飞控。
查看视频流
电脑需设置为固定 IP 地址,与 GCU 及相机处于同一网段,且 IP 无冲突(GCU 默认 IP 地址为 192.168.144.121,相机默认 IP 地址为192.168.144.108)。关闭防火墙。
设置完看是否能ping通吊舱,如果ping不通可以换个电脑试下
ping通的话,在浏览器访问192.168.144.108,用户名user 密码0000。登录就可以看到视频和设置吊舱
默认的设置视频延时可能比较大,可以设置如下(辅码流可以关闭):
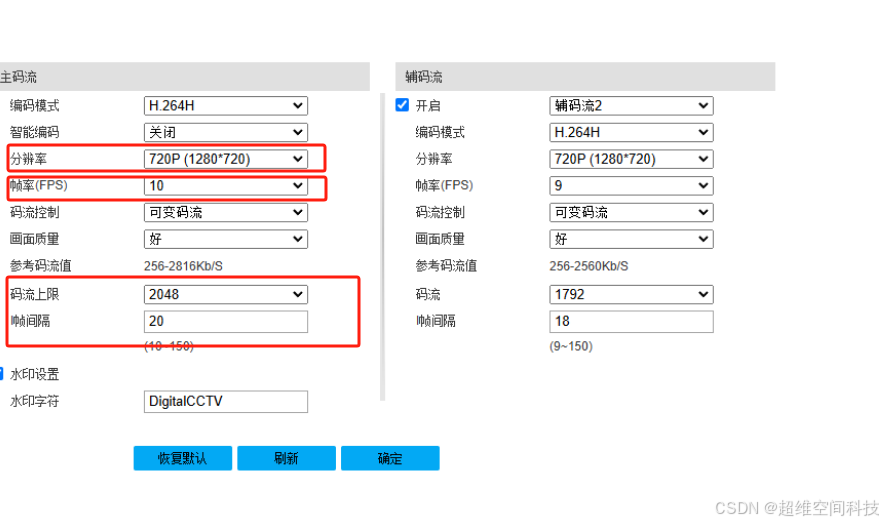
视频流的RTSP地址如下:
以相机 IP 地址 192.168.144.108 为例:
主码流(默认 3840x2160 @30fps,对应 GCU 中的第四路流):
rtsp://user:0000@192.168.144.108:554/cam/realmonitor?channel=1&subtype=0
辅码流 1(默认 352x240 @20fps,对应 GCU 中的辅码流):
rtsp://user:0000@192.168.144.108:554/cam/realmonitor?channel=1&subtype=1
辅码流 2(默认 1920x1080 @30fps,对应 GCU 中的主码流):
rtsp://user:0000@192.168.144.108:554/cam/realmonitor?channel=1&subtype=2
飞控设置
可以通过MAVLINK_MSG_ID_GIMBAL_DEVICE_SET_ATTITUDE 284消息包控制吊舱。
可以把遥控器的通道映射到期望姿态/角速度通过这个消息发给吊舱。
PX4设置如下:
MAV_1_CONFIG TELEM2
MAV_1_MODE Custom / Gimbal
MAV_1_RATE 115200 B/s
Serial
SER_TEL2_BAUD 115200 8N1
Mount
MNT_MAIN_PITCH AUX1
MNT_MAIN_YAW AUX2
MNT_MODE_IN Auto (RC and Mavlink Gimbal)
MNT_MODE_OUT MAVLink gimbal protocol v2
MNT_RC_IN_MODE 这个参数决定是控角度还是角速度。
最后把遥控器通道映射一下,例如用通道7控制pitch,用通道8控制yaw,则设置如下:



















 2670
2670

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











