







 该论文提出一种结合梯度优化与拓扑路径规划的无人机实时重规划方法,旨在解决基于梯度的路径优化易陷入局部最优的问题。通过引入几何引导路径和拓扑路径搜索,生成安全、平滑的飞行轨迹,并利用UVD算法高效地处理路径等价关系。此外,还介绍了如何在路径搜索中应用采样策略和路径缩短、修剪技术,以实现快速有效的实时路径规划。
该论文提出一种结合梯度优化与拓扑路径规划的无人机实时重规划方法,旨在解决基于梯度的路径优化易陷入局部最优的问题。通过引入几何引导路径和拓扑路径搜索,生成安全、平滑的飞行轨迹,并利用UVD算法高效地处理路径等价关系。此外,还介绍了如何在路径搜索中应用采样策略和路径缩短、修剪技术,以实现快速有效的实时路径规划。
fastplanner2
这篇论文是港科大开源的无人机运动规划fast planner的第二版,这里写下我对这篇工作的理解。
摘要
基于梯度的方法(GTO)容易陷入局部最优,本文就是提出一个新的基于GTO的方法来解决这个问题。
相关工作
基于梯度的路径优化
GTO是一种主要的路径生成算法,把路径生成看作一个最小化目标函数的非线性优化问题。
拓扑路径规划
用拓扑路径来进行规划
路径制导轨迹优化
A. 优化失效分析
GTO规划的失败和不好的初始路径有关。如下图所示,在欧式符号距离场(ESDF)中,梯度会拉动路径让它离开障碍物,但是如果路径穿越“山脊”或者“山谷”,梯度会是两个完全相反的方向,让路径规划出现问题。
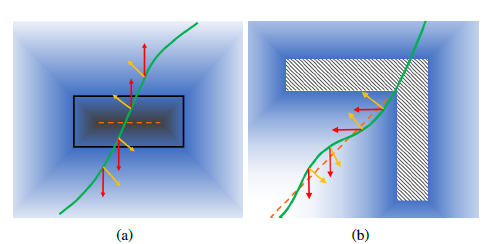
对于这种情况,仅仅靠ESDF的梯度并不够,需要额外的信息。
B. 问题公式化
文中提出的PGO方法是对上面GTO的改进,它把路径用B样条来表示。对于PGO方法,分为两步,第一个阶段产生一个过渡的预热轨迹(warmup trajectory),然后对这个warmup trajectory的平滑度和净空度再进行优化。两个阶段如下图:
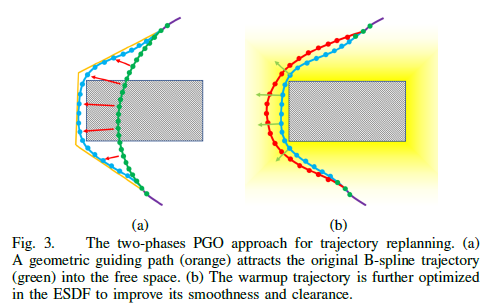
a图的绿色是初始B样条轨迹,橙色的是几何引导路径,几何引导路径把初始轨迹拉到没有碰撞的地方形成warmup 路径(蓝色),然后b图中,对warmup路径再进一步进行平滑度和净空度的优化,得到红色最终轨迹。这个几何引导路径通过A或者RRT等传统方法就可以得到,本文用的是采样的方法得到这条引导路径。
第一阶段的目标函数是:

这里 f s f_s fs是平滑度的约束,具体在第一版的fast planner里有描述:

f g f_g fg是引导路径和B样条路径之间的距离的惩罚函数:
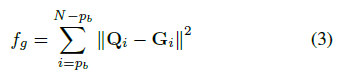
这里的 Q i Q_i Qi是B样条的控制点, G i G_i Gi
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2015
2015

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









