






小孔成像原理
在高中物理中,学习过小孔成像原理,如下图所示就是小孔成像的过程: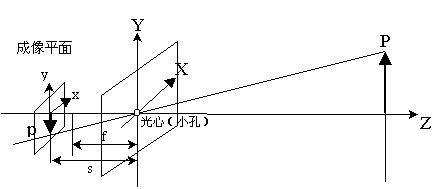
在此图中,可以利用三角形相似的原理,成像图与真实的物体之间的关系: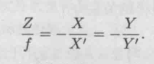
在成像的过程中,可以得到一张无畸变的图像,在这张图像定义一个像素坐标系,像素坐标系的原点在图像的左上角,u轴向右,v轴向下。在像素平面上还有一个成像平面,成像平面以光心的投影为原点。
在像素图像中显示的投影图像,可以通过坐标的平移与放缩表示二者之间的数学关系,具体的关系如下:
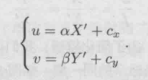
式子中,α和β为投影图像在像素图像中放缩的倍数,c为坐标系平移的过程,更具上式所求的投影图像与实际图像的关系,可以得到下式:
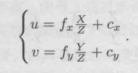
还可以将上式的方程做写成矩阵的形式,可以得到如下矩阵:
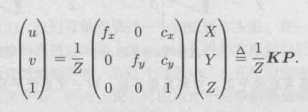
可以看出,K与相机自身的参数有关,所在在这可以称其为内参数矩阵。注意:在相机出场后,其内参都已确定,就是商家给不给你的问题。
将完内参,相机还具有外参,在矩阵表示的像素图像中,P 的相机坐标系应该代表它的世界,在相机坐标系下的P加上相机位姿的旋转矩阵R和平移矩阵t,可以得到其世界坐标系下的坐标Pw。
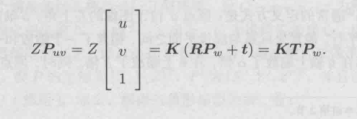
提一下:在上式中有齐次坐标和非齐次坐标的变换。















 8036
8036











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









