






单应矩阵与本质矩阵
单应矩阵是描述两个平面之间的映射关系。在感知的场景中特称点都落在同一个平面上,则可以通过单应矩阵来进行运动估计。
设在环境中有一个平面P,这个平面满足方程:
n(T)P+d=0;
将上式等价变换可以得到:
引入p2点,前文说过p2点的表示,于是我们可以得到如下的式子:
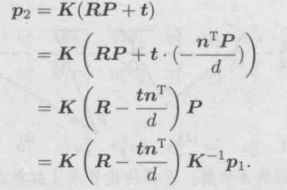
p2=Hp1;
单应矩阵与平面的旋转、平移及平面P的参数有关,与前文所说的求解本质矩阵的方法类似,可以通过若干个特征点求取。

上述H矩阵,它在构造时使得h9=1,根据第三行可以求解,通过求解上述矩阵可以得到:

通过上述得到的匹配点构造了两项约束,而单应矩阵只有6个自由度,所以只需要四个点就可以求解上述方程组(但此处的四个点不可以共线)。















 3495
3495











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









