







1 回顾 :DQN
DQN 笔记 State-action Value Function(Q-function)_UQI-LIUWJ的博客-CSDN博客
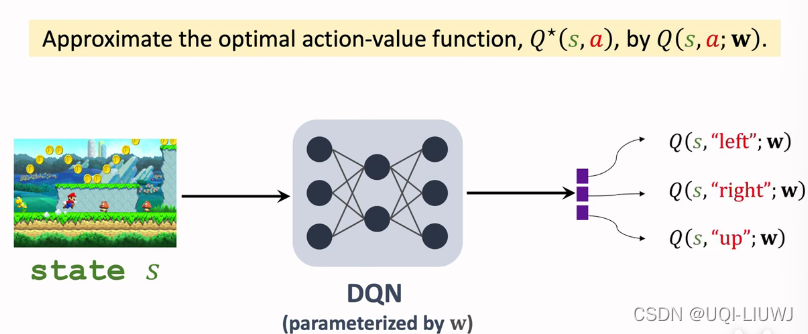
DQN是希望通过神经网络来学习Q(s,a)的结果,我们输入一个人状态s,通过DQN可以得到各个action对应的Q(s,a)
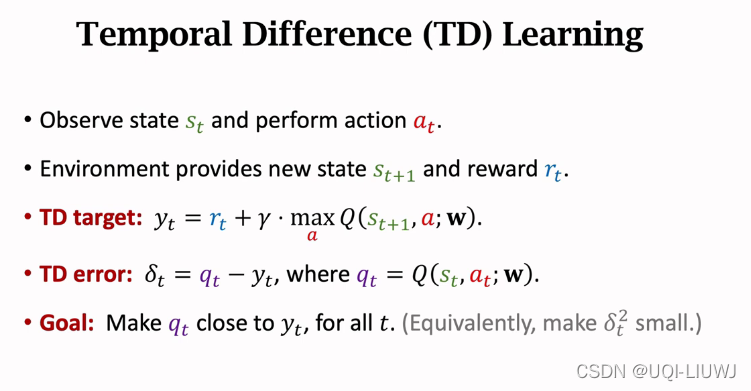
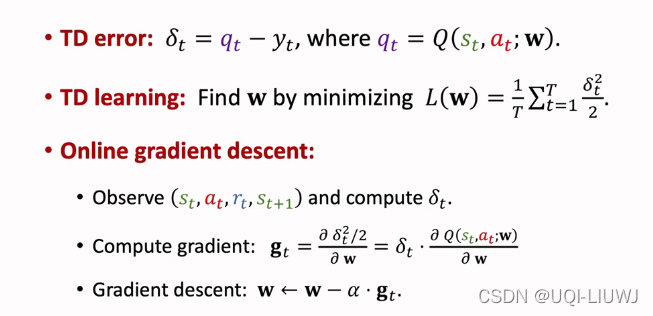
通常用TD来求解DQN
其中rt是实际进行交互得到的真实奖励,Q(s,a),
是预测得到的价值函数
(注:Q是fixed target network,所以qt和yt会稍有不同)
在之前我们所说的DQN中,我们每次采样得到一组episode
,然后就用这组episode来计算相应的loss,进行梯度下降更新参数
而用这组数据训练了模型之后,这组数据就被丢弃了
2 TD算法的缺点
2.1 缺乏经验
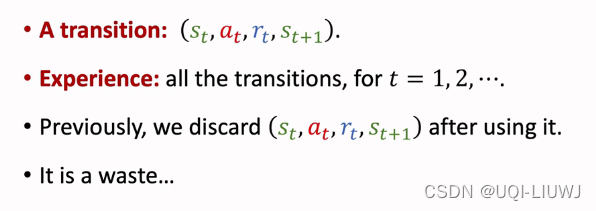
而事实上,经验是可以重复使用的
2.2 correlated updates
比如玩游戏,当前画面和下一帧画面之间的区别会非常小,也就是
会非常相近。实验证明把这些episode数据尽量打散,有利于训练得更好
另外一种思考的方式是,我每次更新DQN参数的时候,所需要的数据只是一个四元组,与实际的策略
关联不是很大,所以可以反复利用之前收集的实验四元组,来训练模型,更新参数
3 经验回放
经验回放可以克服之前的两个缺点
把最近的n条记录存到一个buffer里面
如果存满了,每次存入一条新的transition,就删除当前最老的那一条transition
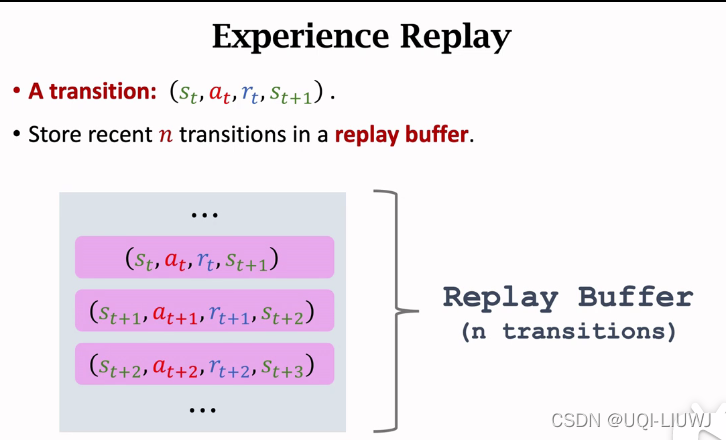
需要人为指定replay buffer的大小b。即数组中只保存最近的b条数据。当replay buffer存满了之后,删除最旧的数据。
数组的大小b是一个需要调的超参数,大小会影响训练的结果。
在实践中,要等回放数组中有足够多的四元组时,才开始进行经验回放更新DQN
- 如果将DQN用于Atari游戏,最好收集了20万条四元组时再做经验回放,更新DQN
- 如果用更好的Rainbow DQN,收集了8万条四元组的时候就可以进行DQN的更新了
在回放数组中的四元组数量不够时,DQN只与环境进行交互,而不去更新DQN参数,否则实验效果会不好。
3.1 使用经验回放之后的TD
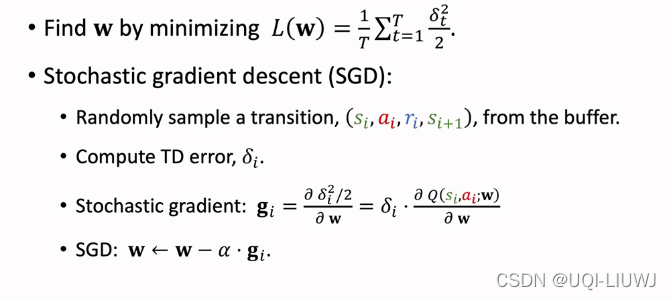
这里是从buffer中随机选择一个transition,实际上是从buffer中随机选择一个batch,做mini-batch SGD
3.2 经验回放的好处
1 打破了transition的关联性
- 在训练DQN的时候,我们希望相邻两次使用的四元组是独立的
- 但是智能体收集经验的时候,相邻的两个四元组
有很强的相关性。
- 依次使用这些强关联的四元组训练DQN,往往效果会很差。
- 经验回放每一次从数组里面随机抽取一个四元组,用来对DQN的参数进行一次更新。
- 这样随机抽到的四元组都是独立的,消除了其中的相关性。
2 经验可以重复使用
- 这样可以用更少的样本数量达到同样的表现
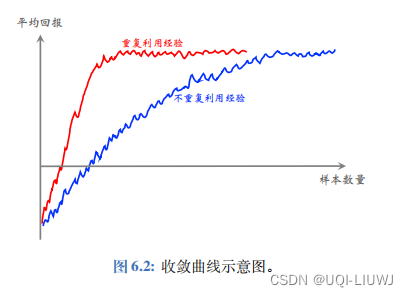
注意区分“样本数量”和“更新次数”,一个样本可以在不同的时候用来更新DQN参数
3.3 经验回放的局限性
- 并非所有的强化学习方法都允许重复使用过去的经验。
-
经验回放数组里的数据全都是用 行为策略 (Behavior Policy) 控制智能体收集到的。在收集经验同时,我们也在不断地改进策略。
-
策略的变化导致收集经验时用的 行为策略 是过时的策略,不同于当前我们想要更新的策略——即 目标策略 (Target Policy) 。
-
也就是说,经验回放数组中的经验通常是过时的 行为策略 收集的,而我们真正想要学的 目标策略不同于过时的行为策略。
-
-
有些强化学习方法允许 行为策略 不同于 目标策略 。这样的强化学习方法叫做 异策略(Off-policy) 。【eg,Q-learning】
-
有些强化学习方法要求 行为策略 与 目标策略 必须相同。这样的强化学习方法叫做 同策略 (On-policy)。【eg,SARSA,A2C】——> 经验回放不适用于同策略。
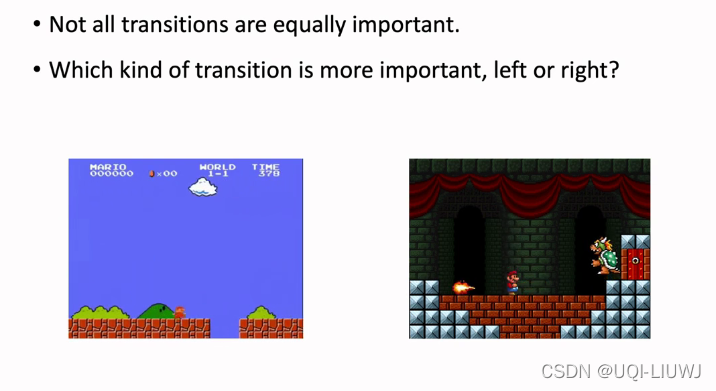
4 优先经验回放
buffer里面有多条 transition,每条的优先级各不相同
比如以超级玛丽为例,左边是普通关卡,右边是打boss的关卡。左边常见右边不常见。由于右边的经验少,所以很难真正训练除右边的情况应该如何做决策,在这种情况下,右边的重要性更大一些。
4.1 如何判断哪些样本重要?
那么如何自动判断那些样本更重要呢?
比如boss关卡数量少,这就导致DQN的预测值
严重偏离
因此,要是
较大,那么应该给样本
较高的权重。
在实操中
是未知的,所以我们可以用TD来近似表示之
如果TD误差的绝对值
大,说明当前的DQN对
的估计不准确,那么应该给样本

在priority experience replay 中,如果一条transition有更高的TD error δt,那么我们就认为他距离TD target比较大,DQN就不熟悉这个场景,所以需要给他较大的优先级。
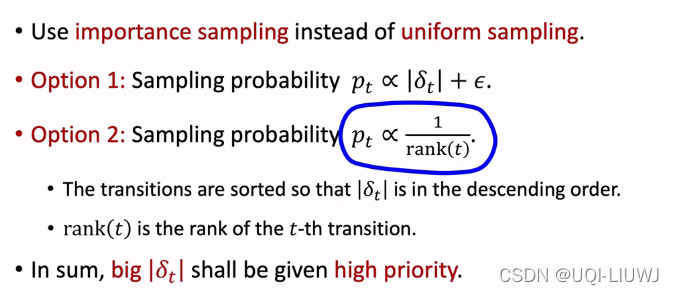
4.2 如何设置采样概率?
优先经验回放的思路就是用非均匀抽样代替均匀抽样,有两种抽样方法
- option 1 中的ε是一个很小的数,为了防止抽样概率接近于0
- rank(t)是δt排序后的序号,δt越大,rank(t)越小
——>两种option的原理是一样的:TD误差大的样本被抽样道德概率大
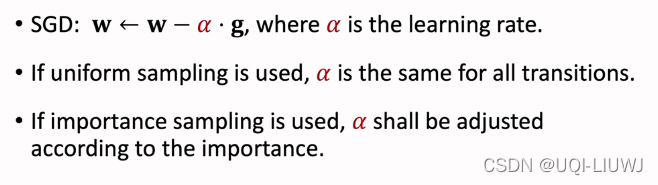
4.3 如何调整学习率?
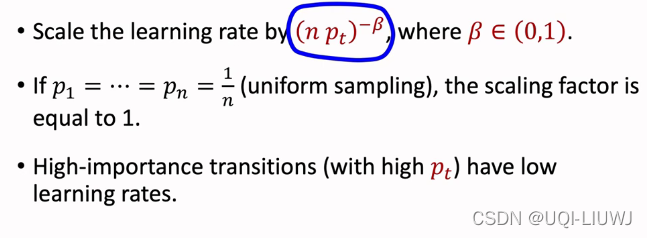
抽样的时候是非均匀采样的,我们需要相应地调整学习率,以减少不同抽样概率带来的偏差
如果一条transition有较大的抽样概率,那么他的学习率应当相应地小一些 (用来抵消大抽样概率带来的偏差,因为大抽样概率那么我被采样到的次数就会稍多)
- n是经验回放数组中样本的总数
- p是采样样本
- β是一个需要调的超参数
- 【其实均匀抽样可以看成一个特例】
4.3.1 学习率和抽样概率互相抵消了嘛?
当β=1时,如果抽样概率p增大10倍,但是学习率α缩小10倍,那么抽样概率和学习率不是抵销了嘛?
其实不是的,下面两种方式并不等价

如果一条transition 刚被采集到,我们是不知道他的δt的,此时我们直接给他设置最大的优先级,也就是未被使用过的transition具有最高的优先级
每次使用一条transition之后,我们都要重新更新他的δt
4.3.2 总体流程
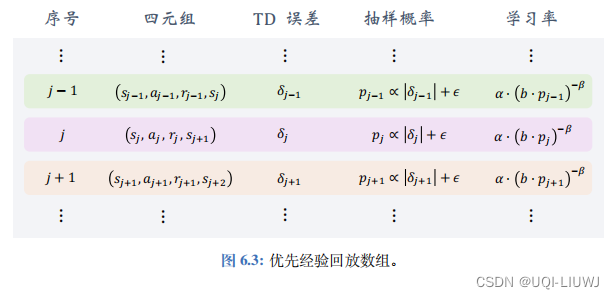
- 优先经验回放数组如图 6.3 所示。设 b 为数组大小,需要手动调整。
- 如果样本(即四元组)的数量超过了 b,那么要删除最旧的样本。
-
数组里记录了四元组、 TD 误差、抽样概率、以及学习率。
-
注意,数组里存的 TD 误差 δ j 是用过时 DQN 参数计算出来的(这也影响到抽样概率和学习率):
-
-
做经验回放的时候,每次取出一个(或多个)四元组,用它计算出新的 TD 误差:

- 然后用它更新 DQN 的参数。用这个新的 δ′j 取代数组中旧的 δj。(抽样概率和学习率也同步更新)
参考资料:


















 4295
4295

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











