







对决网络
(Dueling Network)
是对
DQN
的神经网络的结构的改进。
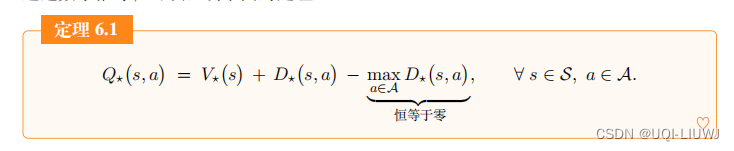
它基本想法是将最优动作价值 Q
⋆
分解成最优状态价值
V
⋆
与最优优势
D
⋆
。
1 最优优势函数
1.1 回顾一些基础知识
-
动作价值函数

-
最优动作价值

-
状态价值函数:Q(s,a)关于a的期望

- 最优价值函数

- 最优价值函数
1.2 最优优势函数

由于
 是指定了s和a之后的最优值,a不一定是使得V(s)最大的那个action,所以
是指定了s和a之后的最优值,a不一定是使得V(s)最大的那个action,所以

也就是说,
 (a为使得V(s)最大的那个action时,取到这个max)
(a为使得V(s)最大的那个action时,取到这个max)
2 对决网络
- 与 DQN 一样,对决网络 (Dueling Network) 也是对最优动作价值函数 Q⋆ 的近似。
- 对 决网络与 DQN 的区别在于神经网络结构不同。
- 由于对决网络与 DQN 都是对 Q⋆ 的近似, 可以用完全相同的算法训练他们。
- 对决网络由两个神经网络组成
- 一个神经网络记作
,它是对最优优势函数
的近似
- 另一个神经网络记作
,它是对最优价值函数V*(s)的近似
- 一个神经网络记作

注:这里右边的第三项不一定恒为0,因为神经网络D是近似D*,而不是真的等于D*,如果等于的话,那第三项是0。
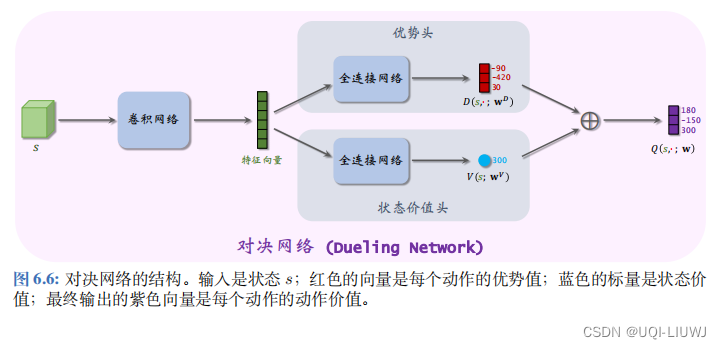
2.1 对决网络举例
举个例子,动作空间是 A = { 左 , 右 , 上 } ,优势头的输出是三个值:
状态头 输出的是一个实数,比如是:
首先计算
然后用(6.1)计算出
这个就是对决网络的最终输出


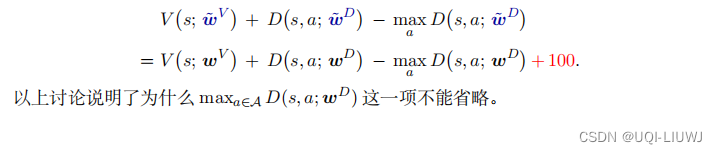
3 为什么公式的最后一项必须要
由于对决网络是由定理6.1 推导出的
那么最优动作价值就可以有两种等价形式

那么能不能用第一种形式实现对决网络呢?
答案是不可以,因为这样会导致不唯一性假如这样实现对决网络,那么 V 和 D 可以随意上下波动,比如一个增大 100 ,另一个减小 100 : 这样的上下波动不影响最终的输出:
这样的上下波动不影响最终的输出:
这就意味着 V 和 D 的参数可以很随意地变化,却不会影响输出的 Q 。我们不希望这种情况出现,因为这会导致训练的过程中参数不稳定。
因此很有必要在对决网络中加入 第三项,他使得V和D不能随意地上下波动
假如让
V
变大
100
,让
D
变小
100
,则对决网络的输出会增大
100
,而非不变:
4 对决网络的实际实现
在实际实现的时候,用mean代替max会有更好的效果
所以我们实际上这么实现对决网络

- 对决网络与 DQN 都是对最优动作价值函数 Q⋆ 的近似,所以对决网络与 DQN 的训练和决策是完全一样的。
- 怎么样训练 DQN,就怎么样训练对决网络;
- 怎么样用 DQN 做控制,就怎么样用对决网络做控制。
- 如果一个技巧能改进 DQN 的训练,这个技巧也能改进对决网络。
- wgtrf同样的道理,Q 学习算法导致 DQN 出现高估,同样也会导致对决网络出现高估。


















 3955
3955

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











