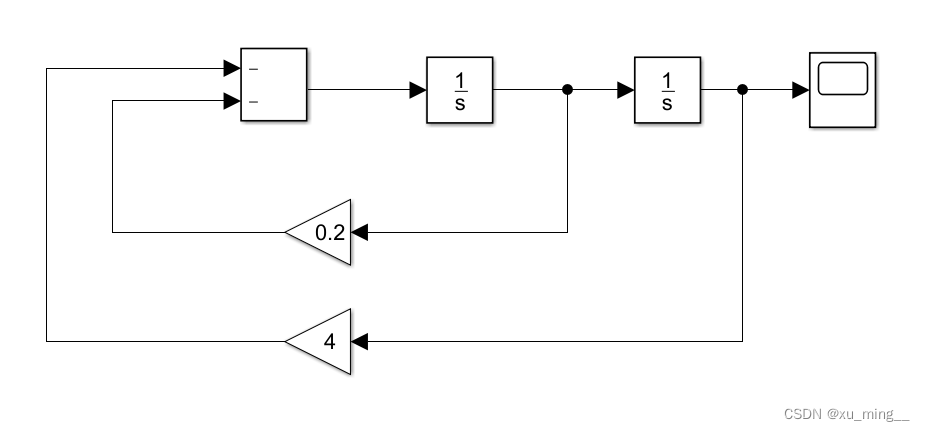
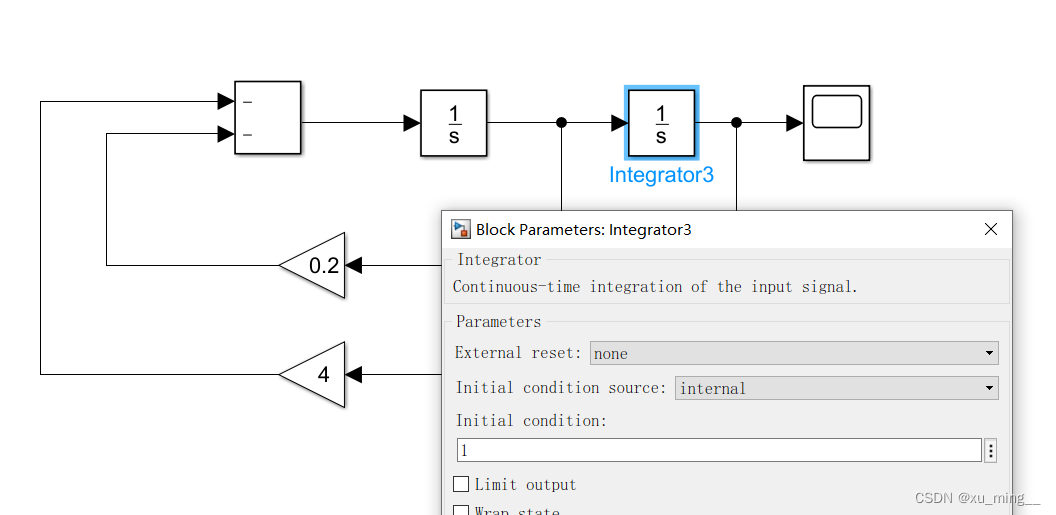
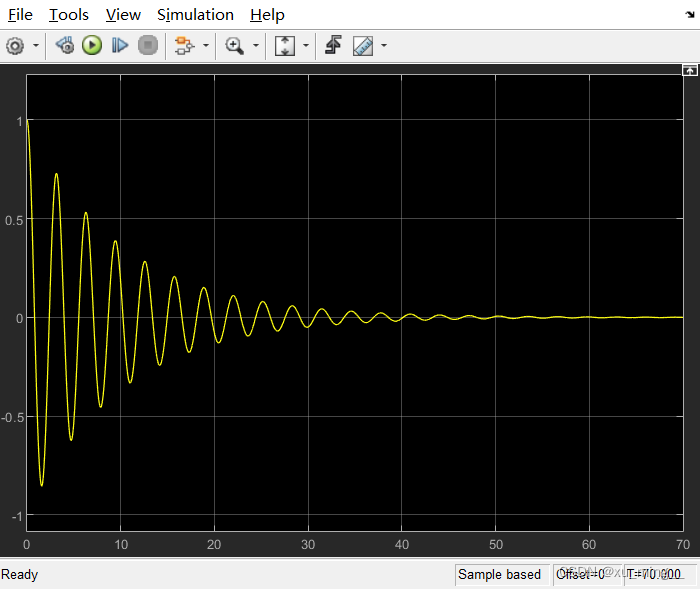
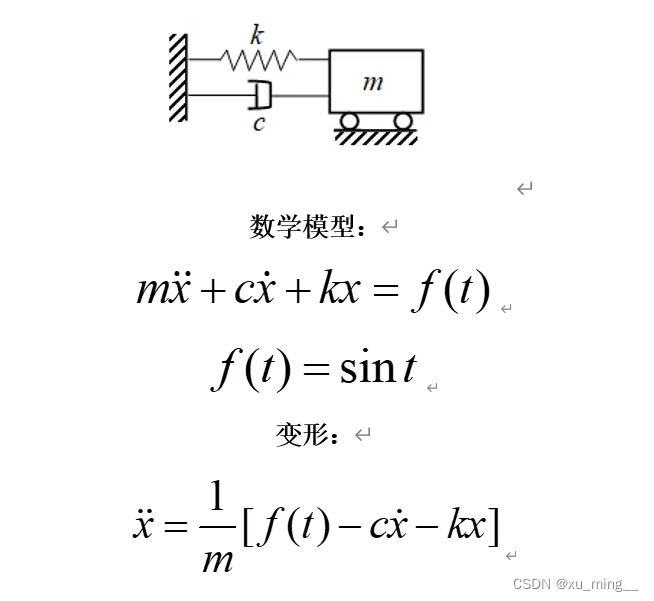
二阶弹簧阻尼系统PID控制simulink仿真 二阶弹簧阻尼系统数学建模 二阶弹簧阻尼系统simulink仿真搭建 系统对输入信号的响应测试 阶跃信号输入测试 正弦信号输入测试 PID控制 控制思路 PID位置控制 串级PID控制 速度环控制 位置环控制 二阶弹簧阻尼系统数学建模 二阶弹簧阻尼系统simulink仿真搭建 打开matlab的simulink工具,先画出弹簧阻尼系统如下: 图中的“4”和“0.2”两个系数分别是x和x一阶导数的系数 给第二个积分环节一个初值,即位置初始值为“1” 运行得到结果: 振荡幅值越来越小,与期望结果一致! 系统对输入信号的响应测试 输入信号看作一个新的f(t)函数,可以是任意函数,数学模型如下: 阶跃信号输入测试









 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 3608
1098
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
3608
1098
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






