







1.查看bag数据包的基本信息
数据:nsh_indoor_outdoor.bag
rosbag info nsh_indoor_outdoor.bag
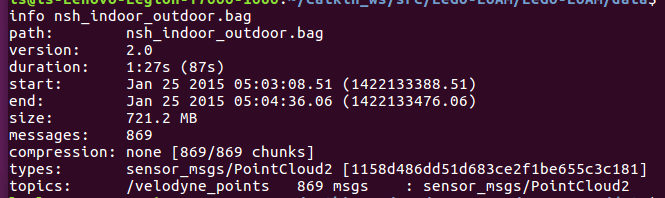
可以看出topic:/velodyne_points
查看frame_id
//打开终端
roscore
//打开新终端 播放数据
rosbag play nsh_indoor_outdoor.bag
// 打开新终端 查看/velodyne_points的frame_id
rostopic echo /velodyne_points | grep frame_id
查看结果如下:frame_id=velodyne

修改frame_id
修改frame_id
2.rviz显示点云信息
执行以下命令:
roscore
//打开新终端
rosrun rviz rviz// 打开rviz
设置rviz
点击add-》PointCloud2
设置:
fix-frame=velodyne
topic:/velodyne_points
播放bag包
rosbag play nsh_indoor_outdoor.bag
显示结果
















 4730
4730











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









