







前言
本篇学习使用numpy生成球面斐波那契网格。
斐波那契网格公式
对于一个球体,要在球体表面上均匀选取N个点,就可以使用斐波那契网格公式:
z
n
=
r
(
2
n
−
1
N
−
1
)
x
n
=
r
1
−
z
n
2
⋅
cos
(
2
π
n
ϕ
)
y
n
=
r
1
−
z
n
2
⋅
sin
(
2
π
n
ϕ
)
ϕ
=
5
−
1
2
z_n = r(\frac{2n-1}{N} - 1) \\ \quad \\ x_n = r\sqrt{1-z_n^2}\cdot \cos(2\pi n\phi) \\ \quad \\ y_n = r\sqrt{1-z_n^2}\cdot \sin(2\pi n\phi) \\ \quad \\ \phi = \frac{\sqrt{5} - 1}{2}
zn=r(N2n−1−1)xn=r1−zn2⋅cos(2πnϕ)yn=r1−zn2⋅sin(2πnϕ)ϕ=25−1
其中,
r
r
r表示球半径,
ϕ
\phi
ϕ即黄金分割比例。
代码
通过numpy形成斐波那契网格点云,然后通过open3d来可视化点云图:
import open3d as o3d
import cv2
import numpy as np
if __name__ == '__main__':
vis = o3d.visualization.Visualizer()
N = 1000
r = 1
phi = (np.sqrt(5) - 1) / 2
n = np.arange(0, N)
z = ((2*n + 1) / N - 1)
x = (np.sqrt(1 - z**2)) * np.cos(2 * np.pi * (n + 1) * phi)
y = (np.sqrt(1 - z**2)) * np.sin(2 * np.pi * (n + 1) * phi)
print(z.shape, x.shape, y.shape)
pcd = r * np.stack([x, y, z], axis=-1)
print(pcd.shape)
point_cloud = o3d.geometry.PointCloud()
point_cloud.points = o3d.utility.Vector3dVector(pcd)
vis.add_geometry(point_cloud)
o3d.visualization.draw_geometries([point_cloud])
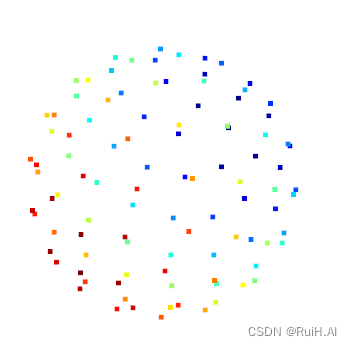
取100个点的效果:
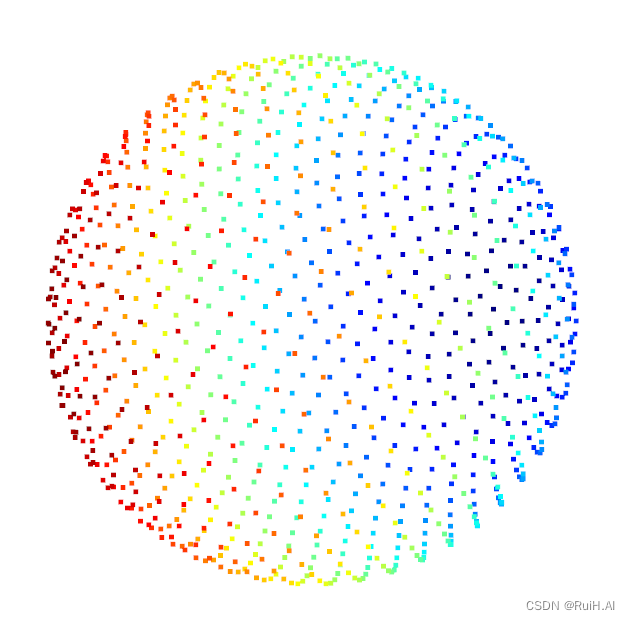
取1000个点的效果:














 321
321











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









