







 MonoDLE通过优化中心点偏差和尺寸估计,结合单目3D检测方法,提升了模型在远距离目标上的性能。研究了2D与3D框投影中心的差异,并提出处理远距离样本的方法。
MonoDLE通过优化中心点偏差和尺寸估计,结合单目3D检测方法,提升了模型在远距离目标上的性能。研究了2D与3D框投影中心的差异,并提出处理远距离样本的方法。
本文分享单目3D目标检测,MonoDLE模型的论文解读,了解它的设计思路,论文核心观点,模型结构,以及效果和性能。

目录
一、MonoDLE简介
MonoDLE作为一个延续CenterNet框架的单目3d检测器,在不依赖dcn的情况下获得了较好的性能,可以作为baseline。
MonoDLE和SMOKE有些像,都是单目实现3D目标检测,通过几何约束和回归3D框信息,得到3D框的中心点、尺寸、朝向,但是它反驳了SMOKE提出的2D检测对3D检测没有帮助的论点。
开源地址:https://github.com/xinzhuma/monodle
论文地址:【CVPR2021】Delving into Localization Errors for Monocular 3D Object Detection
二、论文核心观点
论文核心观点,主要包括为三点:
- 2d box中心点与投影下来的3d box中心点,存在不可忽视的差异,优先使用3d box投影下来的中心点。
- 较远目标,会带偏模型训练;在训练时,可以过滤这些过远的物体标签。
- 提出了一种面向 3D IoU 的损失,用于对象的大小估计,不受“定位误差”的影响。
三、模型框架
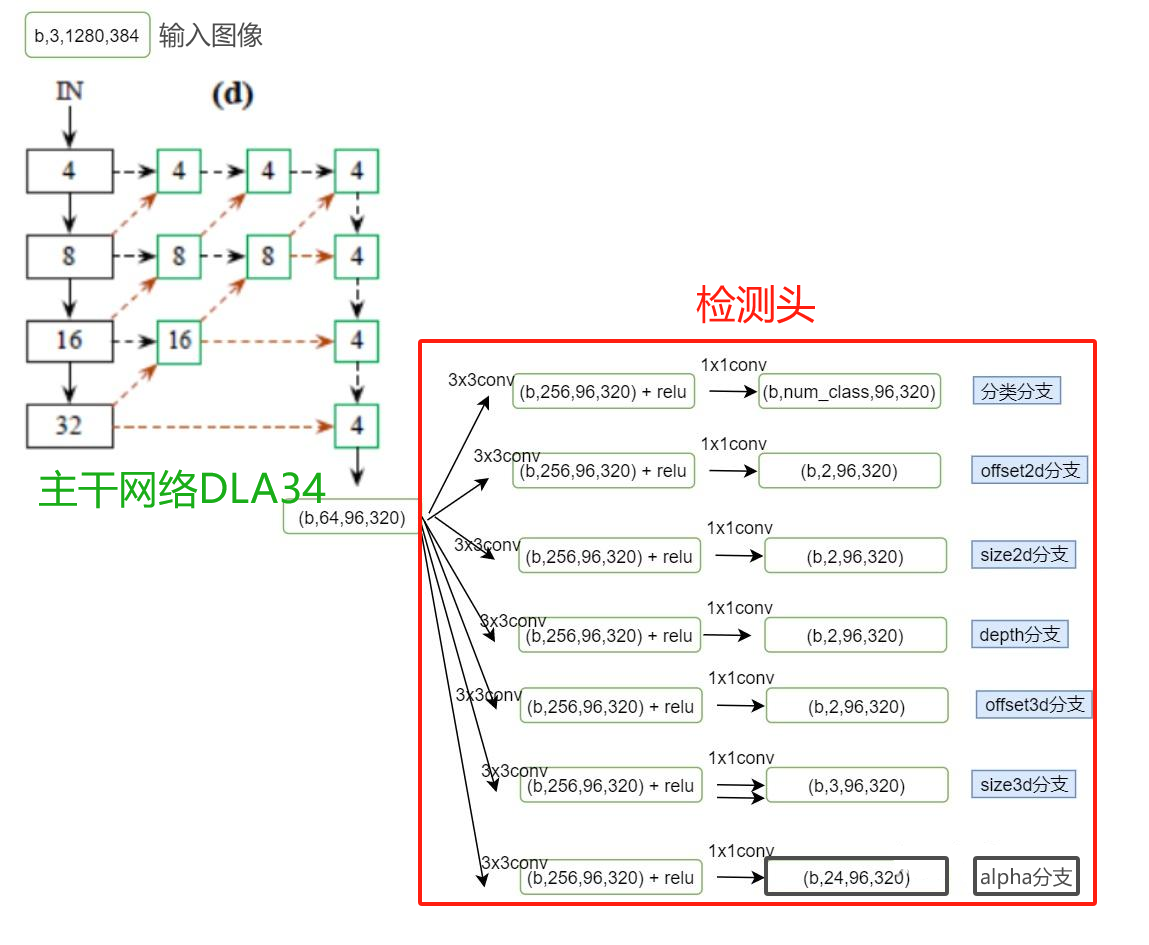
MonoDLE是基于CenterNet框架,实现单目3d检测的。模型结构如下:
Backbone:DLA34
Neck:DLAUp
2D 框检测:3个分支
- 分支一 通过输出heatmap,预测2D框中心点的粗略坐标,以及类别分数。(CenterNet用的是标签中2D框中心作为GT值来监督,MonoDLE采用了3D投影坐标作为粗坐标的监督)
- 分支二 预测的2D框中心点粗坐标与真实坐标之间的偏移。
- 分支三 预测2D框的size。
3D Detection:4个分支
- 分支一 预测2D框中心点粗坐标的深度值。
- 分支二 预测2D框中心点粗坐标与真实的3D投影坐标之间的偏移。
- 分支三 预测3D框的size。
- 分支四 预测偏航角。
模型结构如下图所示:
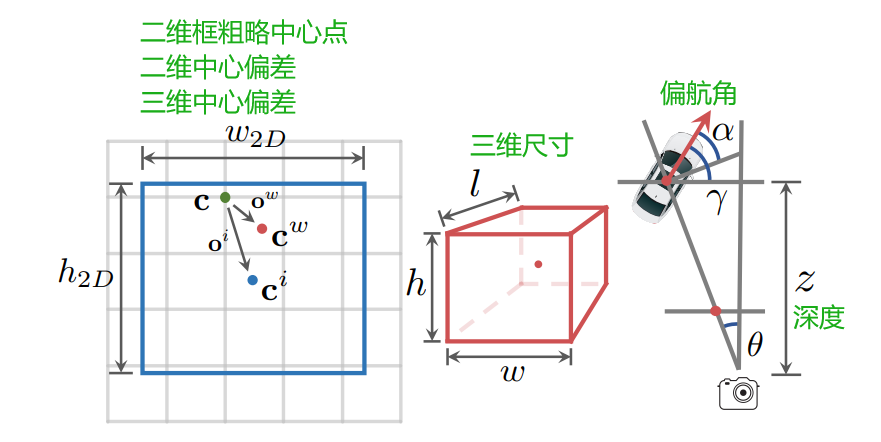
四、模型预测信息与3D框联系
3D框相关的信息
1、3D中心点坐标(cw, yw, zw):通过预测3D中心在像素坐标系下的坐标,结合相机内参可以获得中心点在图像物理坐标系下的坐标(x,y,z)。再结合预测深度zw,获得zw/z的比例系数,就能求出xw,yw。由此可见,深度估计对整体定位精度的影响还是很大的。
2、深度估计:基于端到端的思路实现;同时在输出上做了一个不确定性建模,在预测深度d的基础上同时预测标准差σ。对于σ的分布,文中做了拉普拉斯分布和高斯分布,起到一定优化作用。
3、尺寸估计:以往的尺寸估计,应用的损失函数都是通过计算和真值框之间的交并比来约束尺寸。这样带来的问题就是,由于中心点的预测误差导致的损失偏大,会给尺寸估计带来不必要的负担。所以作者提出了尺寸估计并专门设计了损失函数,只针对尺寸的预测误差对这个分支进行优化。并且根据长宽高对于IOU影响的比例不同,对参数优化的权重也按比例进行了设置。
4、航向角估计:用的是multi-bin loss。
模型预测信息,如下图所示:
五、损失函数
MonoDLE的损失由7部分组成,
- 分类损失:Focal Loss
- 2D 中心点损失:L1 Loss
- 2D size损失:L1 Loss
- 3D 深度估计损失:
- 3D 中心点损失:L1 Loss
- 3D heading angle:multi-bin Loss
- 3D size:普通的L1 Loss & MonoDLE提出的 IoU Loss
六、核心内容——3D框中心点偏差分析
作者做了实验,分析3D框中心点偏差,以CenterNet作为baseline ,它是使用2D框的中心点,作为3D框在图像中的坐标,进行指导训练。AP只有9.97。
- 当使用3D投影坐标作为图像中坐标的监督时,AP有16.54。
- 当把模型预测的深度值,替换为真实的深度,AP有35.11。
- 当把模型输出的3D中心坐标,替换为激光雷达的真实3D中心坐标,AP有72.36。
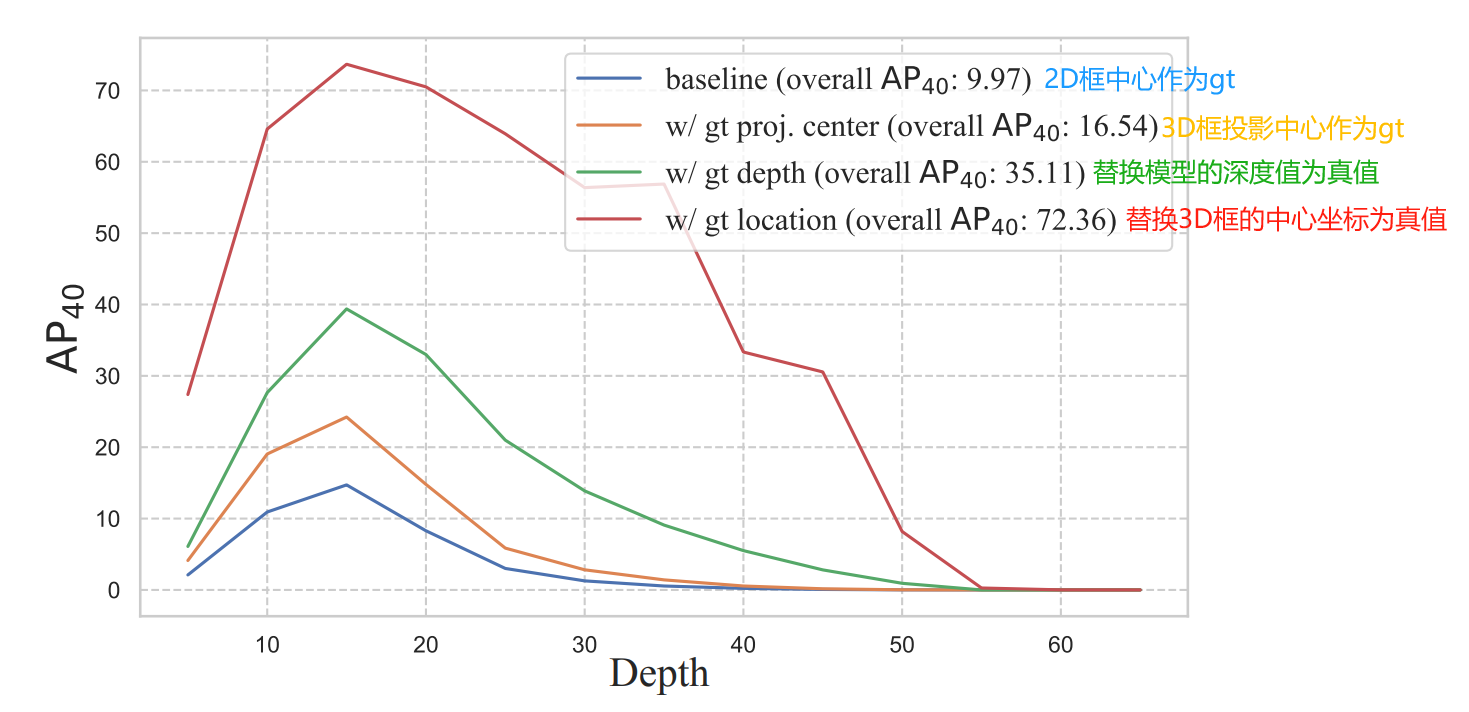
由此可以知道影响单目相机做3D目标检测的主要原因:深度、3D中心点偏差。同时使用3D投影的中心坐标,有助于估计粗略的中心感知 3D 几何信息,提高模型精度。
由此分析问题得到的结论:
- 2D框中心与3D对象的投影中心之间的偏差,证实了保持2D检测相关分支的必要性,通过这种方式,2D 检测被用作相关的辅助任务来帮助学习与 3D 检测共享的特征,这与SMOKE中丢弃 2D 检测的现有工作不同。
- 观察到检测精度随着距离的增加而显著下降,认为由于不可避免的定位错误,几乎不可能使用现有技术准确地检测远距离对象,为此,提出了两种方案:从训练集中去除远距离样本,以及降低了这些样本的训练损失权重。
- 以往的尺寸估计,应用的损失函数都是通过计算和真值框之间的交并比来约束尺寸。这样带来的问题就是,由于中心点的预测误差导致的损失偏大,会给尺寸估计带来不必要的负担。所以作者提出了尺寸估计并专门设计了损失函数,只针对尺寸的预测误差对这个分支进行优化。并且根据长宽高对于IOU影响的比例不同,对参数优化的权重也按比例进行了设置。
下面进一步分析:2D框中心与3D框的投影中心之间的偏差
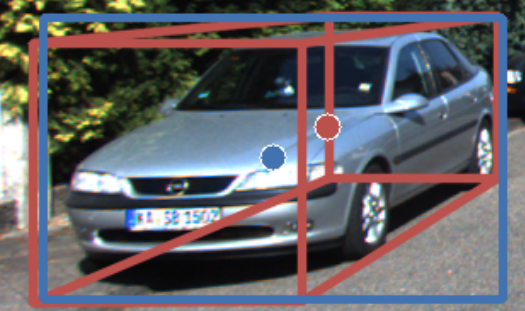
蓝色点是 2D框中心,红色是3D框的投影中心,能明显看到偏差。
看一下模型预测的heatmap,分别使用2D Center和3D 投影中心作为粗坐标监督的影响,可以看出使用3D 投影中心作为监督效果更好。
- 第二行为2D Center监督下,网络输出粗坐标的特征可视化结果
- 第三行为3D 投影中心监督下,网络输出粗坐标的特征可视化结果

七、忽略远距离目标
作者认为忽略远距离目标有助于提高3D目标检测的整体性能,为此提出了两个对应的方案:
方案一 Hard coding:当样本的深度超过给定值,就直接舍弃,不会在训练阶段使用。
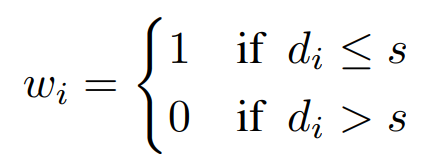
方案二 Soft coding:距离越远,样本的权重值越小,c 和T分别为调整对称性和弯曲度中心的超参数,默认为c = 60 , T = 1。

八、实验对比与模型效果
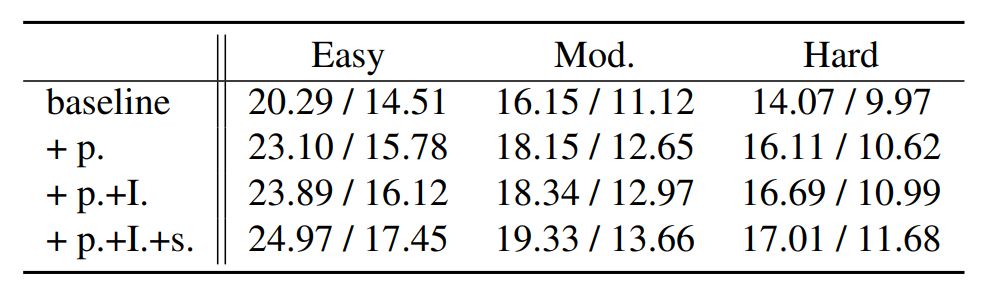
在Kitti验证集做实验,评价指标为Car类别的AP40(BEV / 3D)
- p 表示使用3D 投影中心作为粗中心坐标的监督
- I 表示使用对3D size估计的IOU oriented optimization
- s 表示忽略远距离目标
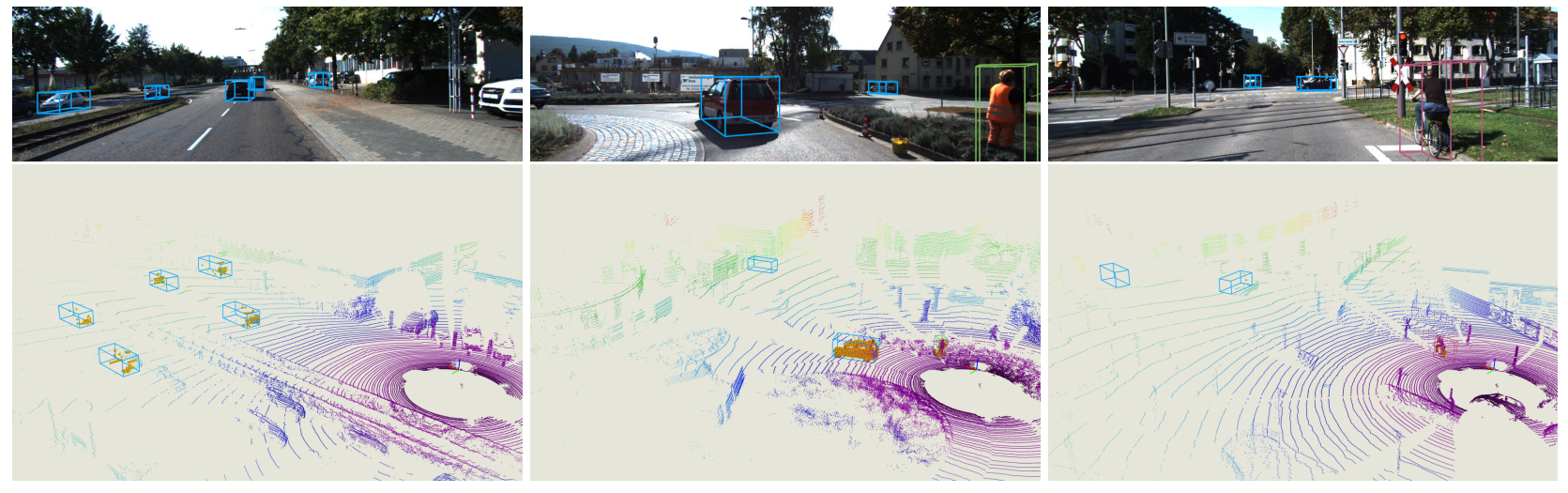
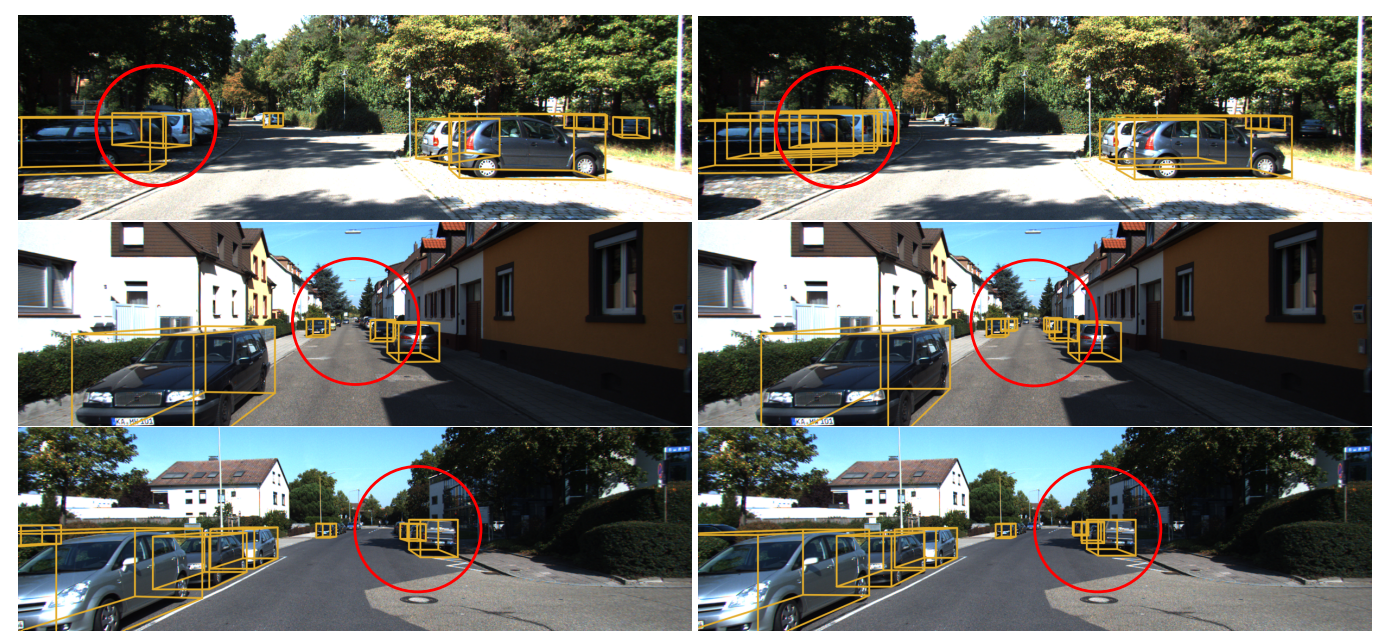
模型预测效果:
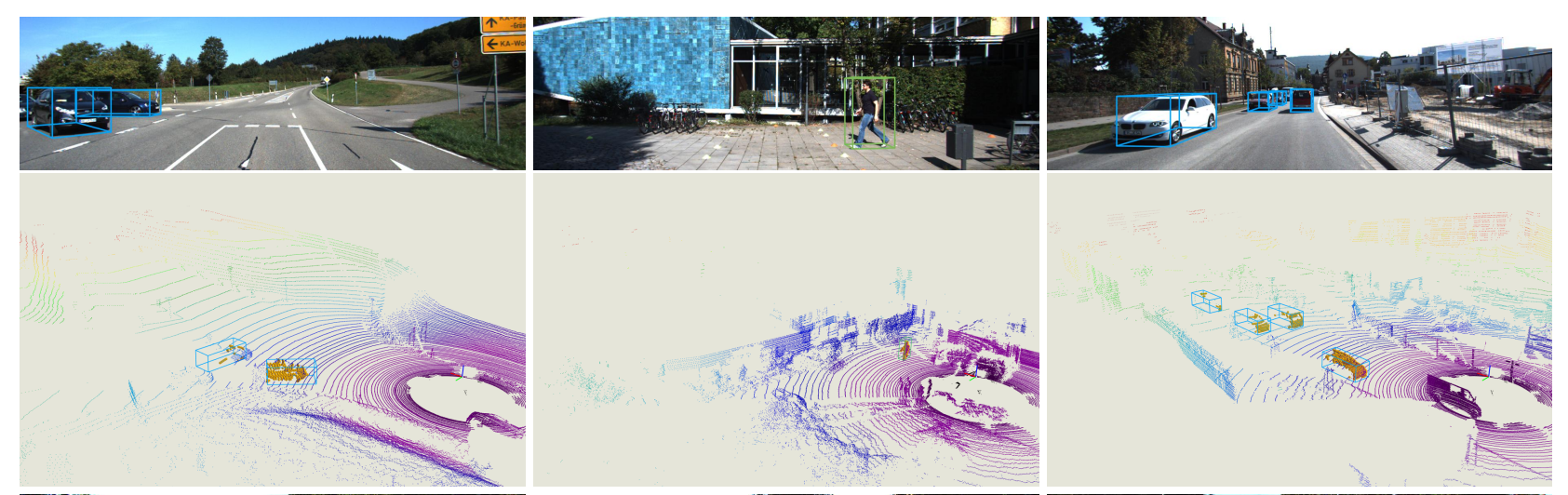
用蓝色、绿色和红色的方框来表示汽车、行人和骑自行车的人。激光雷达信号仅用于可视化。
效果对比:M3D-RPN (left) and MonoDLE (right).
分享完成~
单目3D目标检测系列文章:
单目3D目标检测——SMOKE 模型推理 | 可视化结果-CSDN博客
单目3D目标检测——SMOKE 环境搭建|模型训练_一颗小树x的博客-CSDN博客
【论文解读】SMOKE 单目相机 3D目标检测(CVPR2020)_相机smoke-CSDN博客
3D目标检测数据集 KITTI(标签格式解析、3D框可视化、点云转图像、BEV鸟瞰图)_kitti标签_一颗小树x的博客-CSDN博客
3D目标检测数据集 DAIR-V2X-V_一颗小树x的博客-CSDN博客
后面计划分享,实时性的单目3D目标检测:MonoCon、MonoFlex、MonoEF、MonoDistillI、GUPNet、DEVIANT


















 1734
1734

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











