







目录
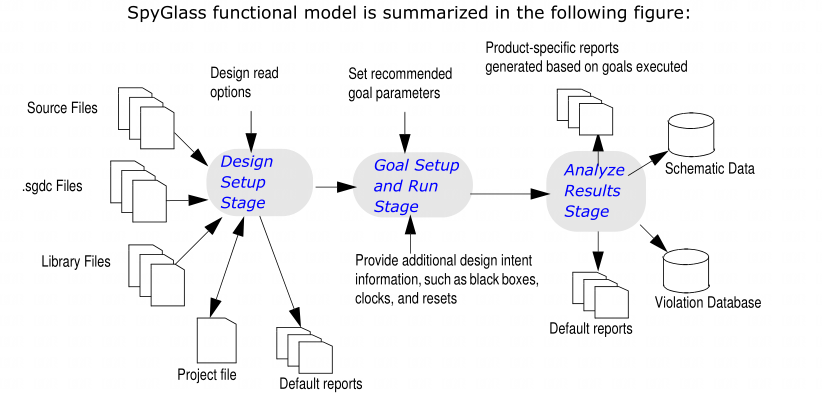
Spyglass是Synopsys公司推出的一款用于设计早期用于保证RTL代码质量,排查CDC问题的RTL代码sign off工具,用于排查问题,尽早解决问题。也可以做低功耗,DFT等相关分析。下图为Spyglass的原理流程示意图,其中首先是设计准备阶段,需要准备源文件,.sgdc文件,lib文件,使用.prj文件对该设计进行管理,同时会给出相应的报告,下一个阶段您选择并运行目标(Gaol)。目标是规则(Rules)的集合。规则就是一条条约束,用于检查的最基本单位。最后是分析结果阶段,此阶段使您能够分析目标运行的结果。目前使用更多的在CDC与Lint部分
设置设计阶段
添加文件选项
| 文件 | 描述 | 脚本使用方式 | 举例 |
| 源列表文件 | 包括扩展名为 .spp 或 .f 的文件。这些文件包含设计文件、设计选项或两者的组合。 | read_file -type sourcelist <file> | read_file -type sourcelist sources.f |
| HDL 库 | 包含预编译的 VHDL 或 Verilog 文件。 | set_option lib <logical_name> <physical_path> | set_option lib MyLib /a/b/mylib_path |
| SGDC文件 | SGDC文件约束,这些设计约束用于提供在 RTL 中不明显的附加设计信息。 | read_file -type sgdc <filename> | read_file -type sgdc constraints.sgdc |
| 技术文件库 | 包括使用这些库单元的结构化网表所需的 Synopsys .lib、.sglib、.plib 和 .gateslib 文件。 | read_file -type <gateslib | sglib | plib> <lib name> | read_file -type sglib library.sglib |
| waive文件 | 屏蔽一些不会在窗口显示的警告信息或者error,就是屏蔽一些规则检查 | read_file -type waiver <prj_name.awl> | read_file -type waiver waiver.awl |
上述给了使用脚本读入文件的方式,也可以使用鼠标点击的方式在GUI界面进行添加相关的文件。不在此赘述。
项目文件(Project File)概述
读入相关文件,包括设计文件,约束文件,库文件等,同时设置运行选项(set_option),SpyGlass选项用于控制SpyGlas运行,并对所有目标具有全局性(单独总结),其次设置参数(set_parameter)在目标中使用SpyGlass参数来指导目标本身的行为。有些选项可以使用set_goal_option在目标中使用,需要注意这些设置是否可以用于该选项。参数有common parameter也有一些目标特有的,因此需要在使用注意参数的使用场景。
如下是一个prj的例子。
#Set the Top of the Design Tree
set_option top training
#Read in individual RTL Files (Verilog/VHDL/Netlists):
read_file -type hdl RTL/training.v
#Read in a file list from an location defined in an environmental file
###read_file -type sourcefile $env(SOURCE)/filelist.f
#Read in a Design Constraints File that contains clocks, resets, set_case_anlysis, etc..
read_file -type sgdc SGDC/training.sgdc
#Define a waiver file to put EXCEPTIONS INTO and a default waiver file.
read_file -type waiver training.swl
set_option default_waiver_file training.swl
#Set a global option that all Verilog will be System Verilog Compliant.
set_option enableSV yes
#Where do we find our rule sets:#Where do we find our rule sets:
current_methodology $env(SPYGLASS_HOME)/GuideWare2.0/block/rtl_handoff
#Define goal specific parameters and options
current_goal cdc/cdc_verify
set parameter ac sync debug yes #Turns on extra debuggin during cdc verify goal
set_parameter enable_handshake no #Turn off Handshake Sync Scheme
set_goal_option XXXX # Only for this goal
#Define a scenario that uses different SGDC file “–goals cdc_verify@mode1”
surrent_goal cdc/cdc_verify –scenario mode1
read_file –type sgdc mode1.sgdc这里对其进行简单解释哈~首先是设置设计Top的名称,就是的module名称。接下来读入相关文件,其中sgdc可以使用DC吐出来的SDC生成,然后在其基础上进行修改,不修改直接使用是不被允许的,官方文件中明确指出需要进一步修改。生成的文件对于大型设计SGDC的书写可以提供很多便利。进而是全局的设置选项,根据自己的需要进行相关的设置。接下来是设置当前的方法,当前的目标,然后目标对应的参数与目标设置。可以使用GUI界面进行检查。同时对于需要重新建立一个项目文件的情况,可以自己使用GUI界面新建一个prj,然后进行相关基础设置后保存,再次基础上进行进一步的修改。
重点是介绍SGDC的书写,将在SGDC的书写(单独总结)篇进行详述
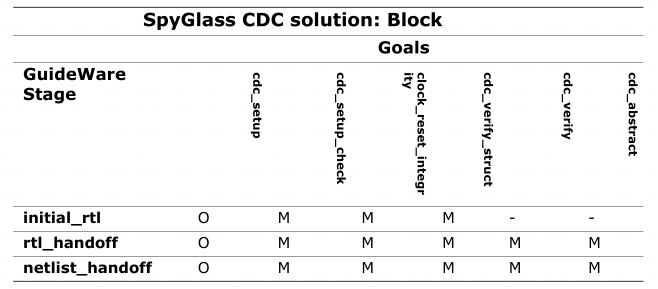
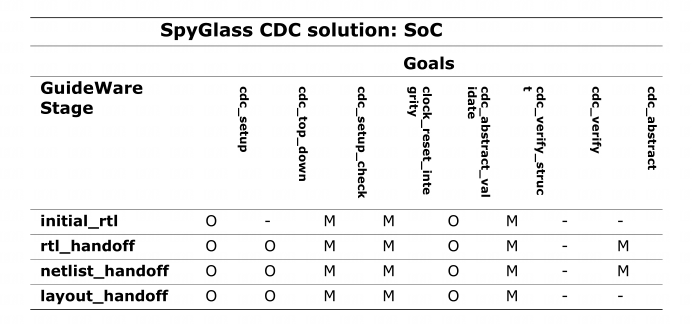
另外一个需要提及的是,current_methodology,方法分为block的handoff以及soc的handoff,在使用的时候根据需要进行选择。其中SoC-level的目标集更多一些~如下图所示。其中M是必选,O为可选,但是整体来看其实主要是在lay_out层次的增加,一般我们只是用rtl检查的话差距不大。
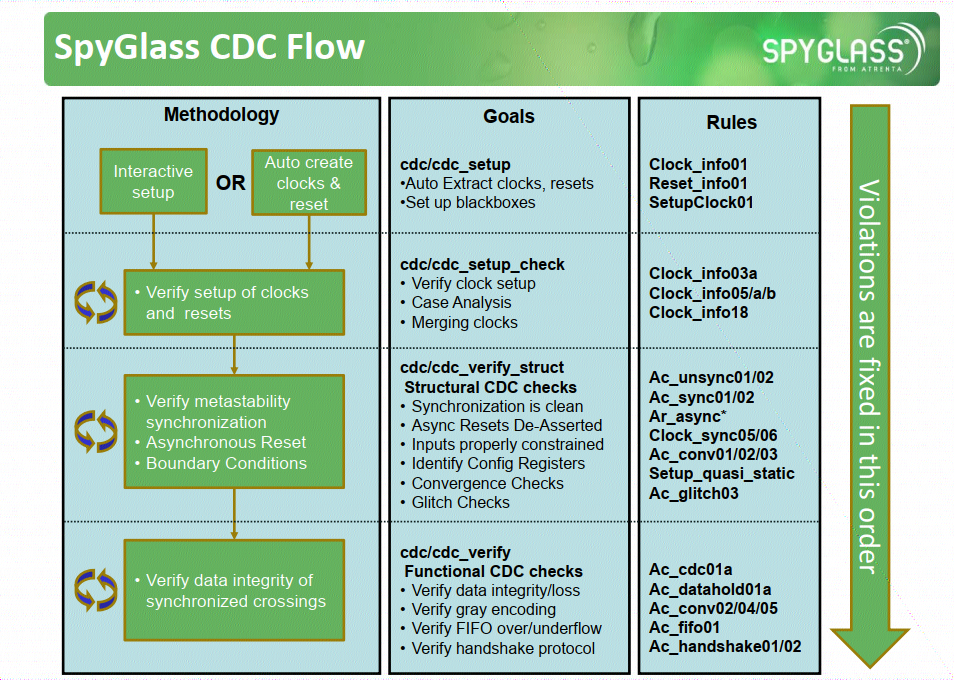
Spyglass CDC流程
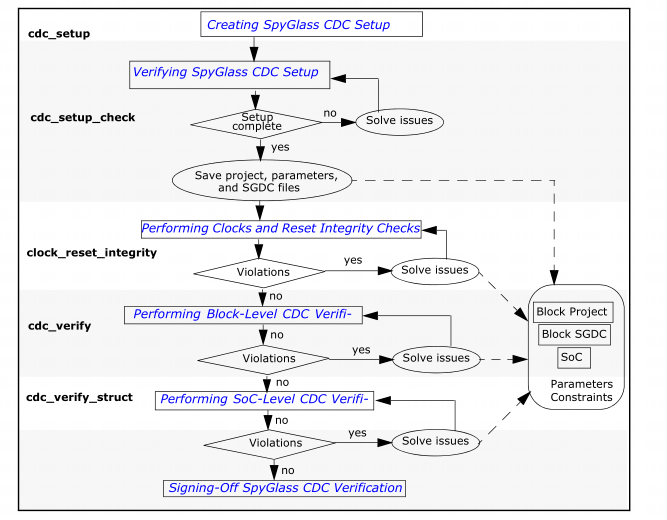
如下图所示,该图介绍了CDC流程的目标及其对应的规则。每一个目标有做对应的事情,需要执行完上一个目标后同时达到该目标后,才可以进行到下一个阶段,可以看到,每一个目标对应的规则是不同的,因此可能会导致一些问题遗漏,同时可能导致下一个目标的error的由于上一个目标没有完成的遗留问题。
接下来简单介绍每一个步骤需要完成的事情
- cdc_setup 该步骤需要做的指定精确完整的SpyGlass CDC验证所需的约束、参数和其他设计组件。
- 输出
- autoclocks.sgdc
- generated clocks.sgdc
- autoresets.sgdc
- generated_resets.sgdc
- 输出
- cdc_setup_check 检查完整正确的设置
- 此步骤的目的是执行约束健全性检查,并检测任何冲突/缺失的约束。对于正确的CDC分析,在约束文件中定义时钟并正确重置非常重要
- 先决条件
- 前一个目标cdc/cdc_setup中的零错误和零警告
- 输出
- Clock_info03a‐报告时钟不受限制的故障
- Clock_info03b报告数据引脚绑定到常数的触发器
- Clock_info05‐报告多路复用器上收敛的时钟信号
- clock_reset_integrity 修正时钟和复位的问题
- cdc_verify 发现时钟域交叉中的结构问题,修正设计中的异步问题
- 输出为可能违反规则的设计问题
- cdc_verify_struct 使用已验证的模块验证SoC
执行起来的时候是一步一步来的~务必确保上一个阶段是没有问题的再进行下一步的检查
运行Spyglass
在运行Spyglass的时候,假设你已经有一个prj文件。
运行时使用如下命令 spyglass –project training.prj –batch –goals cdc/cdc_setup | tee cdc.log &
在分析调试时去掉–batch选项即可,即spyglass –project training.prj –goals cdc/cdc_setup &
使用时根据不同的目标更换对应选项即可
在你没有prj文件的时候,可以使用gui界面快捷的设置相关参数,保存一个文件用于后续的使用。输入spyglass,不加任何选项,读入文件,将不需要检查的文件设置为stop,设置一个top选项,选择一个目标goal,打开incremental Mode,运行,保存prj文件即可,就可以看到一个软件生成的文件了
其他
获取帮助的方式
gui界面的help界面,安装目录下的的doc文件夹下的官方指导文件,论坛博文
调试方式
一般打开电路图进行debug,打开incremental Mode可以方便观察那些改动引起或是消除了那些error
演示
见如下链接(哔哩哔哩视频的形式),主要是异步FIFO的lint与CDC检查。未完成
本文参考:1,SpyGlass_CDCMethodology_GuideWare2.0_UserGuide.pdf 2,SpyGlass_CDC_Training_Slides_510_20Aug2013.pdf

















 1143
1143

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









